
塔基遥感视频监控有效性评估方法
|
欧庚(1998— ),男,甘肃定西人,硕士生,从事视觉传感网覆盖及优化研究。E-mail: ougeng@foxmail.com |
收稿日期: 2021-10-21
修回日期: 2021-11-10
网络出版日期: 2022-03-25
基金资助
国家重点研发计划项目(2017YFB0503500)
版权
Effectiveness Evaluation Method of Tower-based Remote Sensing Videos
Received date: 2021-10-21
Revised date: 2021-11-10
Online published: 2022-03-25
Supported by
National Key Research and Development Program of China(2017YFB0503500)
Copyright
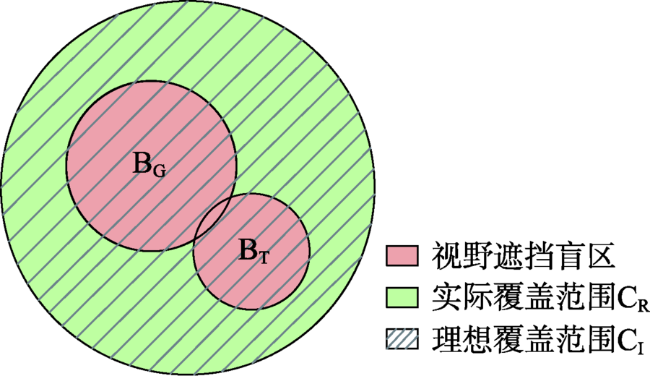
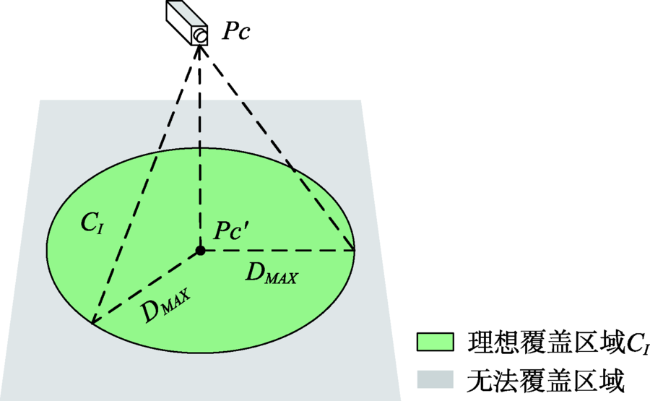
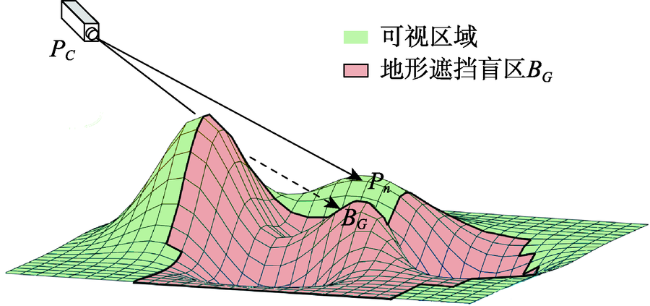
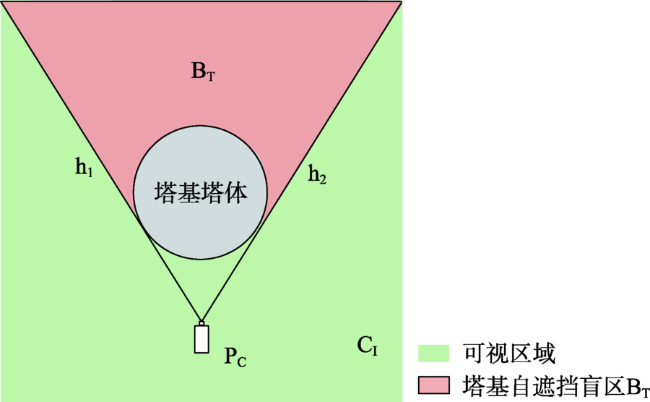
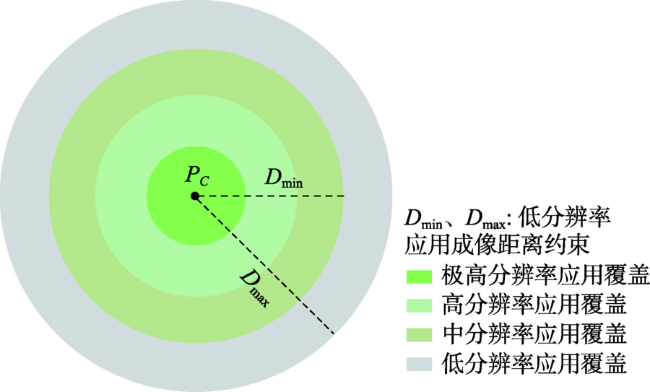
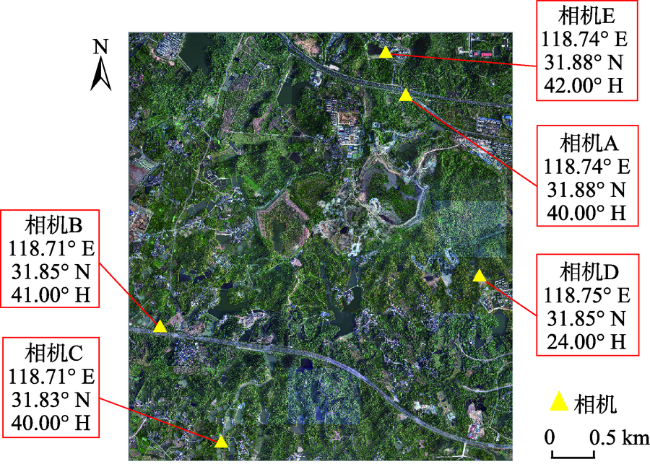
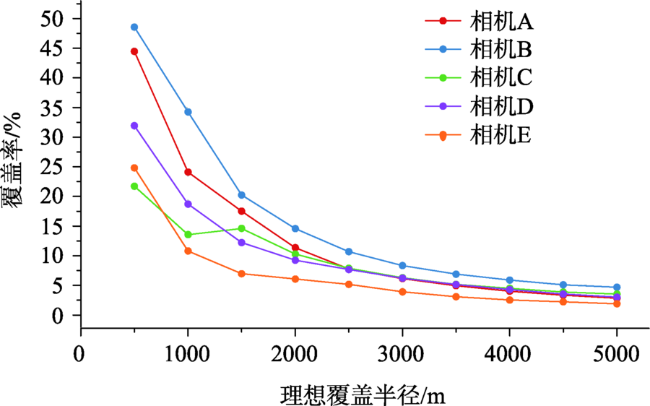
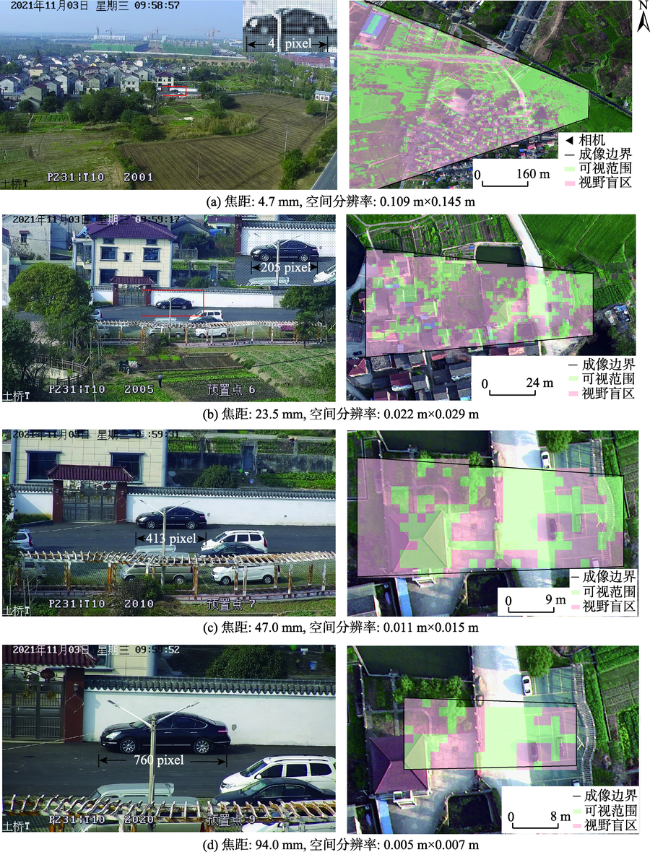
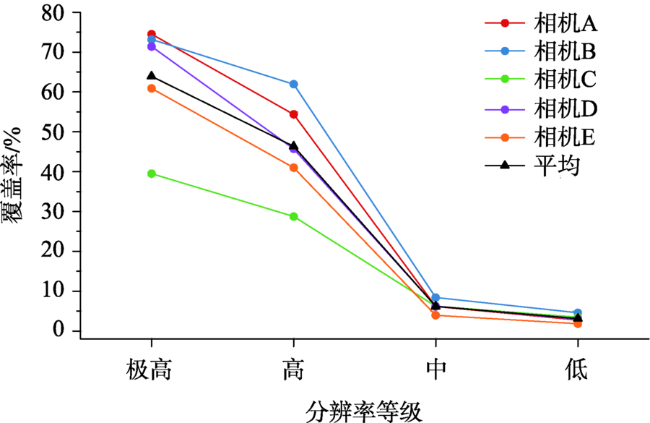
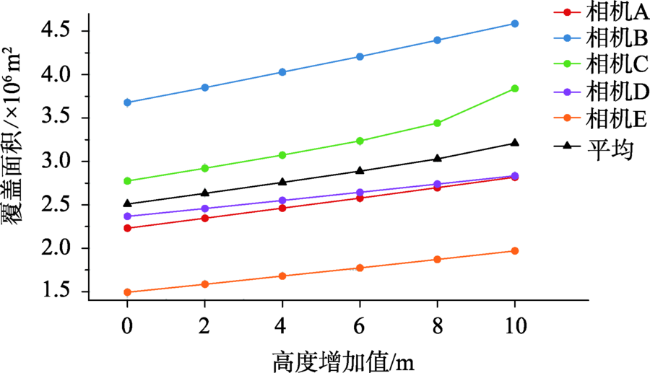
以铁塔作为基础平台,利用其上搭载的相机或其他传感器进行近地面观测被称为塔基遥感。塔基遥感具有不易受到云层遮挡等自然因素影响、可以全天候实时获取视频信息的特点,可有效填补航空航天遥感与地面观测网络之间的尺度空缺,已在各个领域得到广泛应用。然而在面对大面积观测区域和复杂的任务目标时,塔基遥感的实际应用则受到复杂的地形及成像时空间分辨率的约束。如何评估其成像有效性成为未来塔基遥感平台优化建设的关键。为解决上述问题,本研究剖析了塔基遥感相机的成像特点和主要遮挡因素,构建起其实际覆盖范围分析方法。依托主要应用的空间分辨率需求建立分辨率分级体系,并结合实际覆盖范围和相机参数明确各项应用的可应用区域,据此评估塔基遥感视频数据有效性。以南京市江宁区“慧眼守土”塔基遥感视频监控系统为例进行实验分析,结果表明,现有塔基遥感相机受到了周边地形及塔基自身的严重遮挡,5 km内平均覆盖率仅3.20%,塔基自身造成了47.66%视角被遮挡。具有极高、高等级分辨率需求的应用实际覆盖情况较为理想,但中、低等级分辨率应用的实际覆盖情况需要进一步优化。增加相机高度、提升相机变焦能力以及增设环形轨道可以有效对塔基遥感相机的应用有效性进行优化。本研究的分析方法和结果可以为未来数据采集和各项实际应用提供支撑,成为系统评估及选址优化的参考依据。

欧庚 , 周良辰 , 林冰仙 , 汪洋 , 周海洋 , 闾国年 . 塔基遥感视频监控有效性评估方法[J]. 地球信息科学学报, 2022 , 24(1) : 165 -175 . DOI: 10.12082/dqxxkx.2022.210655
Taking the iron tower as the basic platform and using the cameras or other sensors on it to conduct near-surface observations is called tower-based remote sensing. Tower-based remote sensing is not easily affected by natural factors such as cloud occlusion and can obtain video information in real time around the clock. Tower-based remote sensing effectively fills the scale gap between aerial remote sensing and ground observation network, so it has been widely used in various fields. However, when it faces a large area of observation and complex missions, its actual application is usually constrained by the complicated terrain and the spatial resolution. How to evaluate its imaging effectiveness has become the key to the optimization of tower-based remote sensing platform in the future. This research analyzes the imaging characteristics and main occlusion factors of the tower-based remote sensing cameras and constructs its actual coverage analysis method. This research establishes a resolution grading system relying on the spatial resolution requirements of the main applications and clarifies the applicable areas of main applications based on the actual coverage and camera parameters to evaluate the availability. Taking the "smart eyes guarding the land" tower-based remote sensing video system in Jiangning district, Nanjing City as an example, the experimental analysis shows that this method can efficiently calculate the actual coverage range of the tower-based remote sensing cameras in a larger observation area and analyze the main type and proportion of obstructions. This method can clarify the actual spatial resolution of imaging in each area considering the zoom ability of the camera and evaluate the application effectiveness of the system. The existing tower-based remote sensing camera is severely blocked by the surrounding terrain and the tower itself, and the average coverage rate within 5km is only 3.20%. The tower itself causes 47.66% of the viewing angle to be blocked. The actual coverage of applications with extremely high and high resolution is better, but the rest applications’ coverage needs to be further optimized. Increasing the height of the camera, improving the zoom capability of the camera, and adding a circular track can effectively optimize the application effectiveness of the tower-based remote sensing camera. This method can provide support for future data acquisition and practical applications and be a reference for system evaluation and location optimization in the future.
表1 塔基相机成像空间分辨率分级Tab. 1 Levels of tower-based cameras' resolution |
| 分辨率等级 | 空间分辨率/m | 示例应用 |
|---|---|---|
| 极高 | (0, 0.005) | 车牌、行人识别 |
| 高 | [0.005, 0.01) | 车辆、树木识别 |
| 中 | [0.01, 0.1) | 建筑工程类型识别、非法开采监测 |
| 低 | [0.1, 5] | 农田、林地、建筑用地分类及识别 |
表2 实验相机的遮挡统计Tab. 2 Occlusion statistics of the experimental camera |
| 相机编号 | 实际覆盖占比/% | 自遮挡角度/° | 自遮挡盲区占比/% | 地形遮挡盲区占比/% | 主要遮挡物类型 |
|---|---|---|---|---|---|
| A | 2.84 | 66.57 | 18.49 | 78.67 | 山体 |
| B | 4.69 | 165.84 | 46.07 | 49.24 | 塔基、建筑、树木 |
| C | 3.53 | 255.16 | 70.88 | 25.59 | 塔基 |
| D | 3.02 | 179.17 | 49.77 | 47.21 | 塔基、山体、建筑 |
| E | 1.90 | 191.05 | 53.07 | 45.03 | 塔基、密集建筑 |
| 平均 | 3.20 | 171.56 | 47.66 | 49.14 |
表3 5 km内各等级分辨率成像距离约束Tab. 3 Imaging distance constraints of each level of resolution within 5 km |
| 分辨率等级 | 成像距离下限/m | 成像距离上限/m |
|---|---|---|
| 低 | 197 | 5000 |
| 中 | 20 | 2968 |
| 高 | 10 | 297 |
| 极高 | 2 | 148 |
表4 主要遮挡物类型及其遮挡特点Tab. 4 Main types of occlusion and their characteristics |
| 遮挡物类型 | 示例 | 特点 |
|---|---|---|
| 山体 | 相机A东北方向、南方向2000 m | 相机与山体间地表正常成像,山体后均无法成像 |
| 密集建筑及高大树木 | 相机B西方向,相机D南方向 | 可覆盖区域呈细碎点状散落分布,多位于居民区 |
| 塔基塔体 | 相机B东方向、相机C/D/E大部分区域 | 从相机位置出发,一定角度范围内均无法覆盖 |
| [1] |
高添, 于立忠, 于丰源, 等. 中国科学院清原森林生态系统观测研究站塔群平台的功能和应用[J]. 应用生态学报, 2020, 31(3):695-705.
[
|
| [2] |
|
| [3] |
李朝晖, 张永光, 张乾, 等. 植被冠层日光诱导叶绿素荧光塔基自动观测方法及系统介绍[J]. 遥感学报, 2021, 25(5):1152-1168.
[
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
郭健, 刘良云, 刘新杰, 等. 基于查找表的塔基平台O2-A波段大气校正方法研究[J]. 遥感技术与应用, 2019, 34(3):467-475.
[
|
| [14] |
冯笑雨. 基于塔基监控图像的建设施工用地识别与空间定位方法研究[D]. 南京:南京师范大学, 2019.
[
|
| [15] |
方陆明, 柴红玲, 唐丽华, 等. 基于DEM的视频可视域提取算法[J]. 北京林业大学学报, 2010, 32(3):27-32.
[
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
明冬萍, 王群, 杨建宇. 遥感影像空间尺度特性与最佳空间分辨率选择[J]. 遥感学报, 2008, 12(4):529-537.
[
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
/
| 〈 |
|
〉 |


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}