
融合点、体素和对象特征的多基元点云分类
|
汪文琪(1996— ),男,安徽宿州人,硕士,主要从事激光雷达点云数据处理研究。E-mail: wenqi_xd@163.com |
收稿日期: 2021-06-03
要求修回日期: 2021-07-04
网络出版日期: 2022-04-25
版权
The Multiple Primitives Classification of Point Cloud Combining Point, Voxel and Object Features
Received date: 2021-06-03
Request revised date: 2021-07-04
Online published: 2022-04-25
Copyright
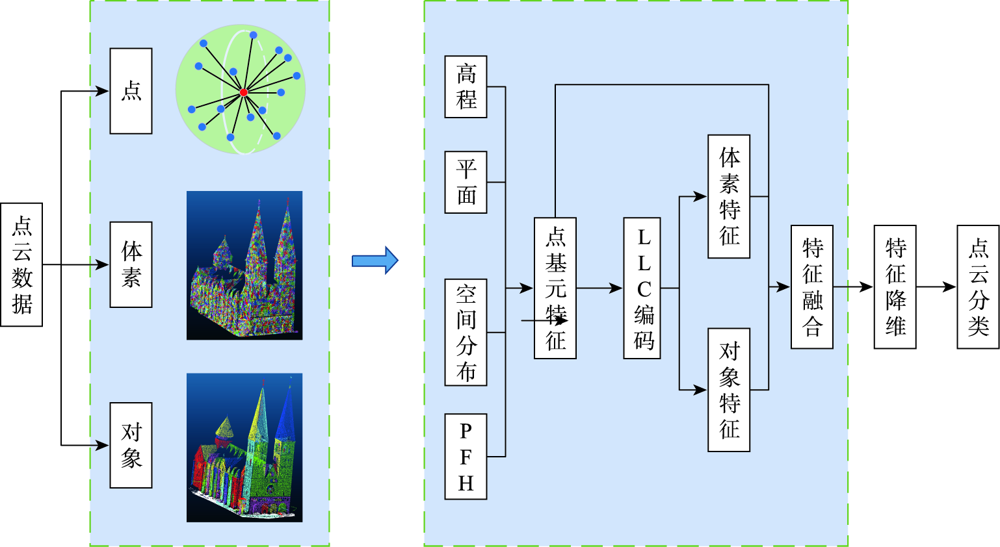
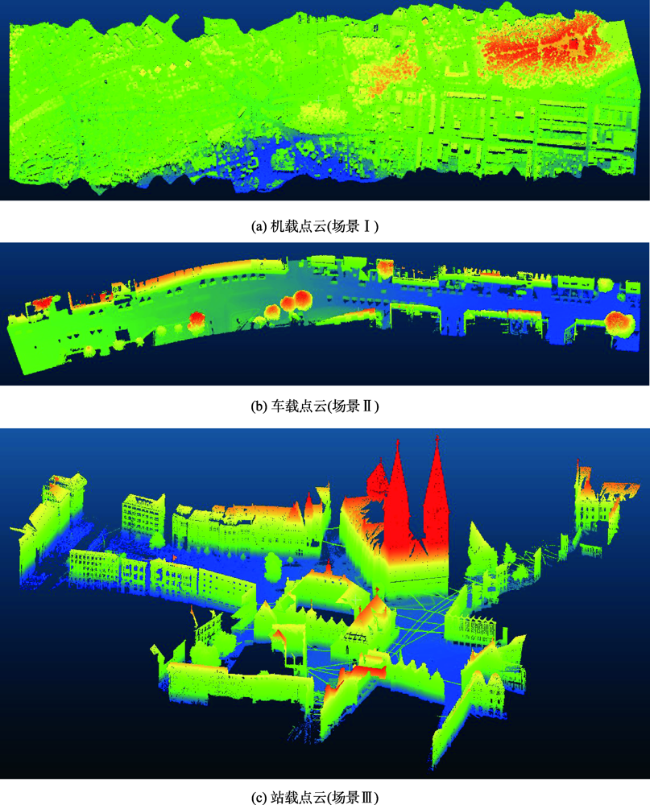
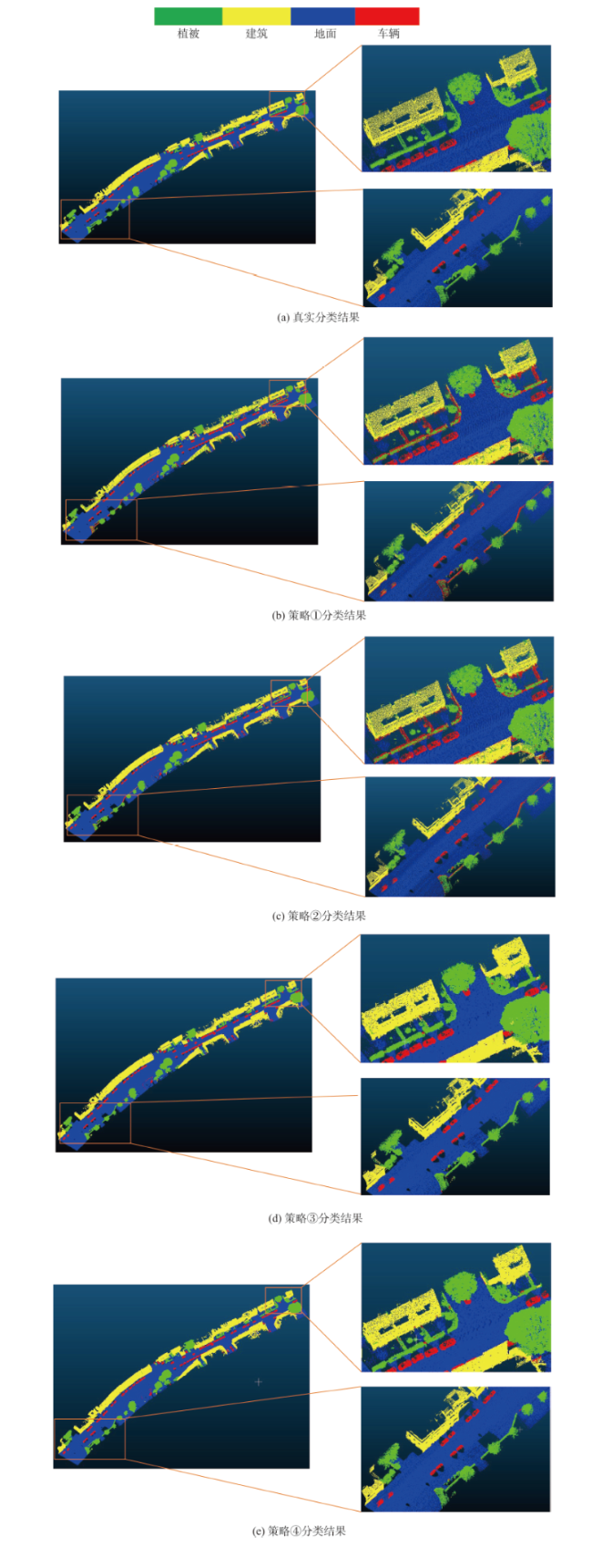
单一基元分类方法难以全面描述复杂的点云场景,采用多基元进行分类成为一种趋势,提出了一种融合点、体素和对象特征的点云分类方法。主要包括4个方面:① 分别确定各层面分类基元,点基元方面采用最优邻域方法,体素基元方面基于八叉树方法进行体素划分,对象基元方面使用改进的多要素分割方法进行点云分割;② 提取各基元分类特征,首先提取点基元分类特征并进行局部线性约束编码(Locality-constrained Linear Coding, LLC),然后以此为基础提取体素基元和对象基元的潜在狄利克雷分布特征(Latent Dirichlet Allocation, LDA)和最大池化特征(Max Pooling, MP);③ 降低分类特征维度,利用随机森林变量重要性算法对分类特征进行筛选与降维;④ 进行点云分类,使用随机森林算法实现点云分类。采用3种不同类型的点云数据进行试验,结果表明融合3种基元特征的分类精度相比于点基元分类分别提升了1.43%、7.02%和2.48%,分类特征降维可以有效降低特征冗余度,分类器分类时间减少约70%;通过与其他算法的对比,新算法分类精度更优,且适用于多种场景点云数据的分类。
汪文琪 , 李宗春 , 付永健 , 熊峰 , 赵昭明 , 何华 . 融合点、体素和对象特征的多基元点云分类[J]. 地球信息科学学报, 2022 , 24(2) : 365 -377 . DOI: 10.12082/dqxxkx.2022.210313
The single primitive classification method is difficult to fully describe the complex scene of point cloud, and multiple primitives classification is becoming a trend. A point cloud classification method combining point, voxel, and object features is proposed in this study. This method mainly includes the following four procedures: (1) Determining the classification primitives at each level. The point primitive adopts a method of optimal neighborhood, and the voxel primitive uses octree to carry out voxel division. In the aspect of object primitive, the improved multi-factor segmentation method is used to realize the point cloud segmentation; (2) Extracting the classification features of each primitive. Firstly, the classification features of point primitive are obtained, and then the Locality-constrained Linear Coding (LLC) is carried out. Secondly, the features of Latent Dirichlet Allocation (LDA) and Max Pooling (MP) are extracted; (3) Reducing the dimension of classification features. The variable importance algorithm of random forest is used to select classification features and reduce its dimension; (4) Completing point cloud classification. The point cloud classification is achieved using random forest algorithms. Three different types of point cloud data are used for the experiment. The result shows that the classification accuracy of multiple primitives is increased by 1.43%, 7.02%, and 2.48%, respectively on the basis of the point primitive classification. The feature dimension reduction can effectively reduce the feature redundancy, and the time cost of the classifier is reduced by about 70%. Compared with other algorithms, this proposed algorithm has a higher classification accuracy and is suitable for the classification of point cloud data acquired from different scenes.
表1 各场景点云训练数据和验证数据Tab. 1 Point cloud training data and verification data of each scene |
| 训练数据 | 验证数据 | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 植被 | 建筑 | 地面 | 车辆 | 电力线 | 植被 | 建筑 | 地面 | 车辆 | 电力线 | ||
| 场景I | 18 336 | 5788 | 11 453 | - | - | 592 888 | 109 983 | 370 338 | - | - | |
| 场景II | 5658 | 8611 | 11 832 | 5377 | - | 277 246 | 421 960 | 579 808 | 48 402 | - | |
| 场景III | 1718 | 10 683 | 4225 | - | 753 | 84 208 | 701 538 | 277 461 | - | 14 321 | |
表2 场景I分类结果Tab. 2 Classification result of scene I (%) |
| 指标 | 类别 | |||
|---|---|---|---|---|
| 植被 | 建筑 | 地面 | ||
| R | 策略① | 96.79 | 84.81 | 96.41 |
| 策略② | 96.79 | 88.48 | 96.90 | |
| 策略③ | 97.66 | 92.57 | 96.88 | |
| 策略④ | 97.50 | 92.65 | 97.09 | |
| P | 策略① | 96.49 | 88.04 | 95.85 |
| 策略② | 97.00 | 90.06 | 96.06 | |
| 策略③ | 97.33 | 94.72 | 96.75 | |
| 策略④ | 97.47 | 94.70 | 96.52 | |
| F1 | 策略① | 96.64 | 86.40 | 96.13 |
| 策略② | 96.90 | 89.26 | 96.48 | |
| 策略③ | 97.50 | 93.63 | 96.81 | |
| 策略④ | 97.48 | 93.67 | 96.81 | |
| OA | 策略① 95.43 策略② 95.98 策略③ 96.87 策略④ 96.86 | |||
表3 场景II分类结果Tab. 3 Classification result of scene II (%) |
| 指标 | 类别 | ||||
|---|---|---|---|---|---|
| 植被 | 建筑 | 地面 | 车辆 | ||
| R | 策略① | 84.20 | 86.68 | 98.75 | 94.96 |
| 策略② | 91.87 | 93.34 | 99.26 | 98.09 | |
| 策略③ | 97.83 | 98.74 | 98.78 | 99.65 | |
| 策略④ | 97.93 | 98.73 | 99.12 | 99.57 | |
| P | 策略① | 89.06 | 94.41 | 99.37 | 45.21 |
| 策略② | 96.25 | 97.17 | 99.34 | 60.82 | |
| 策略③ | 98.52 | 98.80 | 99.34 | 89.56 | |
| 策略④ | 98.71 | 99.04 | 99.42 | 89.80 | |
| F1 | 策略① | 86.57 | 90.38 | 99.06 | 61.25 |
| 策略② | 94.01 | 95.22 | 99.30 | 75.09 | |
| 策略③ | 98.18 | 98.77 | 99.06 | 94.34 | |
| 策略④ | 98.32 | 98.88 | 99.27 | 94.43 | |
| OA | 策略① 91.74 策略② 95.80 策略③ 98.60 策略④ 98.76 | ||||
表4 场景III分类结果Tab. 4 Classification result of scene III (%) |
| 指标 | 类别 | ||||
|---|---|---|---|---|---|
| 植被 | 建筑 | 地面 | 电力线 | ||
| R | 策略① | 83.28 | 97.63 | 97.65 | 94.76 |
| 策略② | 94.54 | 98.90 | 98.14 | 96.83 | |
| 策略③ | 98.17 | 99.30 | 98.19 | 97.75 | |
| 策略④ | 97.99 | 99.35 | 98.30 | 97.72 | |
| P | 策略① | 84.60 | 97.02 | 98.66 | 96.43 |
| 策略② | 96.16 | 98.60 | 98.44 | 96.12 | |
| 策略③ | 99.84 | 99.05 | 98.34 | 98.09 | |
| 策略④ | 99.84 | 99.07 | 98.41 | 98.40 | |
| F1 | 策略① | 83.94 | 97.32 | 98.15 | 95.58 |
| 策略② | 95.34 | 98.75 | 98.29 | 96.47 | |
| 策略③ | 98.99 | 99.18 | 98.25 | 97.92 | |
| 策略④ | 98.91 | 99.21 | 98.36 | 98.06 | |
| OA | 策略① 96.47 策略② 98.34 策略③ 98.91 策略④ 98.95 | ||||
表5 点云分类器训练、测试时间和分类精度Tab. 5 The classifier training, testing time and classification accuracy |
| 降维前 | 降维后 | ||||||
|---|---|---|---|---|---|---|---|
| 训练/s | 测试/s | OA/% | 训练/s | 测试/s | OA/% | ||
| 场景I | 190.96 | 15.22 | 96.86 | 42.19 | 7.22 | 96.98 | |
| 场景II | 121.04 | 16.43 | 98.76 | 41.66 | 8.78 | 98.86 | |
| 场景III | 67.70 | 12.57 | 98.95 | 8.51 | 5.15 | 99.03 | |
表6 各方法总体分类精度Tab. 6 The overall accuracy of each method (%) |
| 场景I | 场景II | 场景III | |
|---|---|---|---|
| 方法1 | 82.07 | 96.75 | 97.54 |
| 方法2 | 95.92 | 95.45 | 97.67 |
| 方法3 | 95.76 | 95.26 | 97.59 |
| 方法4 | 95.54 | 94.37 | 96.92 |
| 本文方法 | 96.98 | 98.86 | 99.03 |
| [1] |
杨必胜, 董震. 点云智能研究进展与趋势[J]. 测绘学报, 2019, 48(12):1575-1585.
[
|
| [2] |
[
|
| [3] |
方莉娜, 黄志文, 罗海峰, 等. 结合SVM与图匹配的车载激光点云道路标线识别[J]. 地球信息科学学报, 2019, 21(7):994-1008.
[
|
| [4] |
|
| [5] |
张继贤, 林祥国, 梁欣廉. 点云信息提取研究进展和展望[J]. 测绘学报, 2017, 46(10):1460-1469.
[
|
| [6] |
张爱武, 李文宁, 段乙好, 等. 结合点特征直方图的点云分类方法[J]. 计算机辅助设计与图形学学报, 2016, 28(5):795-801.
[
|
| [7] |
岳冲, 刘昌军, 王晓芳. 基于多尺度维度特征和SVM的高陡边坡点云数据分类算法研究[J]. 武汉大学学报·信息科学版, 2016, 41(7):882-888.
[
|
| [8] |
熊艳, 高仁强, 徐战亚. 机载LiDAR点云数据降维与分类的随机森林方法[J]. 测绘学报, 2018, 47(4):508-518.
[
|
| [9] |
杨书娟, 张珂殊, 邵永社. 基于多尺度自适应特征的机载 LiDAR点云分类[J]. 光学学报, 2019, 39(2):0228001.
[
|
| [10] |
董震, 杨必胜. 车载激光扫描数据中多类目标的层次化提取方法[J]. 测绘学报, 2015, 44(9):980-987.
[
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
Tong, Li, Zhang, et al. Point set multi-level aggregation feature extraction based on multi-scale max pooling and LDA for point cloud classification[J]. Remote Sensing, 2019, 11(23):2846. DOI: 10.3390/rs11232846
|
| [19] |
|
| [20] |
|
| [21] |
汪文琪, 李宗春, 付永健, 等. 基于改进多规则区域生长的点云多要素分割[J]. 光学学报, 2021, 41(5):198-212.
[
|
| [22] |
|
| [23] |
|
| [24] |
姚登举, 杨静, 詹晓娟. 基于随机森林的特征选择算法[J]. 吉林大学学报(工学版), 2014, 44(1):137-141.
[
|
| [25] |
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}