
顾及空间及语义相关性的POI位置标注优化方法
|
李 琦(1996— ),男,湖北武汉人,硕士生,主要从事兴趣点质量优化研究。E-mail: liqi17@whu.edu.com |
收稿日期: 2021-11-02
修回日期: 2022-02-21
网络出版日期: 2022-09-25
基金资助
国家自然科学基金项目(42071432)
POI Location Optimization Method Considering Spatial and Semantic Relevance
Received date: 2021-11-02
Revised date: 2022-02-21
Online published: 2022-09-25
Supported by
National Natural Science Foundation of China(42071432)
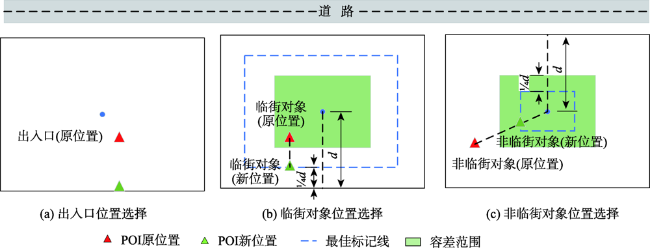
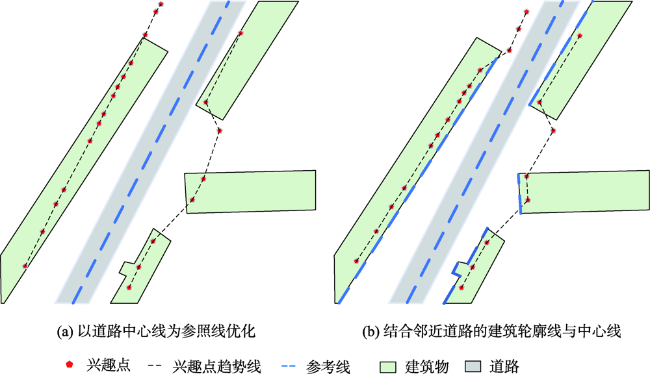
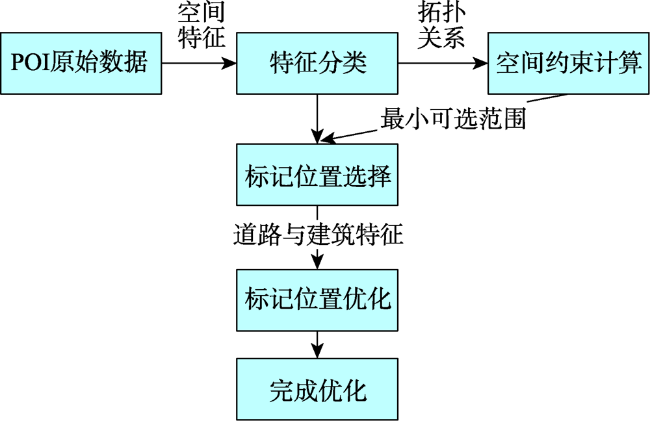
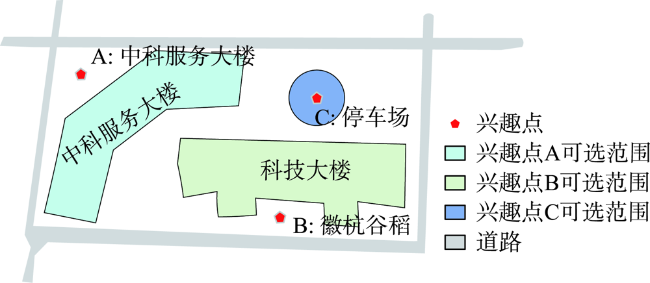
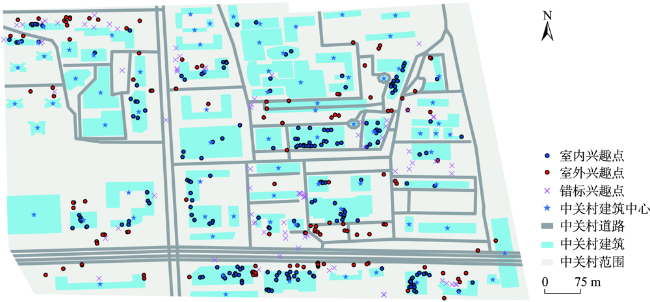
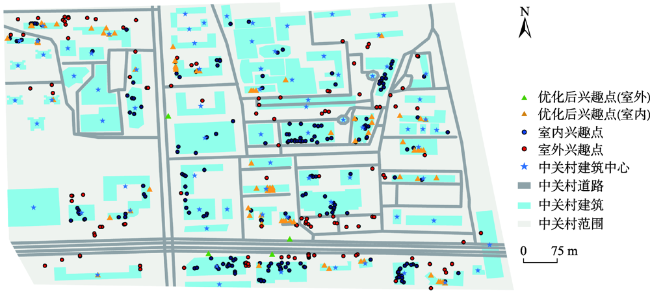
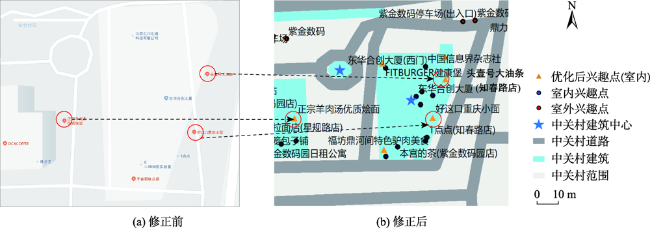
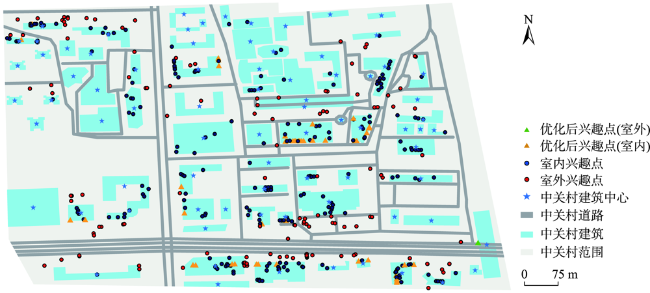
POI的质量是确保寻路、路径规划、导航等高质量地图服务的基础,是影响POI数据的位置准确性、逻辑一致性和语义差异性问题等数据质量问题的关键因素。本文从影响POI位置空间、关系和语义因素3个角度出发,针对POI位置错标、不同语义POI无法区分及POI分布与现实世界不一致的情况,结合建筑数据和道路数据,进行POI多阶段位置优化研究,包括位置约束计算阶段、位置选择阶段、位置优化阶段。以某街道区域为分析区域开展POI位置优化实验,结果表明本文提出的位置优化方法能有效降低错标率(19.3%)、提高可辨识度(6.7%),并有效提高子区域POI分布与道路分布的一致性,有效提高不同语义POI的识别速度。
李琦 , 林志勇 . 顾及空间及语义相关性的POI位置标注优化方法[J]. 地球信息科学学报, 2022 , 24(7) : 1254 -1263 . DOI: 10.12082/dqxxkx.2022.210697
POI (Point of Interest) identifies geographic objects by location and name. Its quality is the basis for ensuring the accuracy of map services such as path planning and navigation, including location accuracy, semantic integrity, logical consistency, etc. Normally, the spatial positional accuracy of point elements obtained by traditional surveying and mapping methods is high and the attributes are complete, but the update cost is high, and the cycle is long, which makes it difficult to meet the requirements of current data. The POI data obtained by the crowdsource method has a strong current situation. However, it has the characteristics of disorder and lack of standard, which can lead to inaccurate spatial position, lack of semantic attributes, inconsistent spatial relationships, and so on. There is an urgent need for effective optimization methods to solve the quality problems of POI data e. This paper analyzes the influencing factors of POI location labeling from the perspectives of space, topology, and semantics, puts forward the POI location labeling principle considering the spatial and semantic correlation, designs a location optimization method with multi-stage constraints, and conducts a verification analysis. Compared with the manual correction method, the optimization method based on the location labeling principle proposed in this paper reduces the influence of manual experience differences on the optimization results and ensures the consistency of the optimization standards. The POI location optimization experiment is carried out using a street area as the analysis area. The results show that the location optimization method proposed in this paper can effectively reduce the mislabeling rate (19.3%), improve the identifiability (6.7%), and effectively improve the sub-region POI distribution and roads. The consistency of distribution can effectively improve the recognition speed of different semantic POIs. However, there are still many processes that need to be carried out manually, such as the completion of POI classification features, road and building data cleaning, etc., making the method in this paper difficult to be applied on a large scale, which would be an research issue for follow-up researches.
表1 POI特征分类Tab. 1 Feature classification of POI |
| 特征维度 | 分类 | 说明 |
|---|---|---|
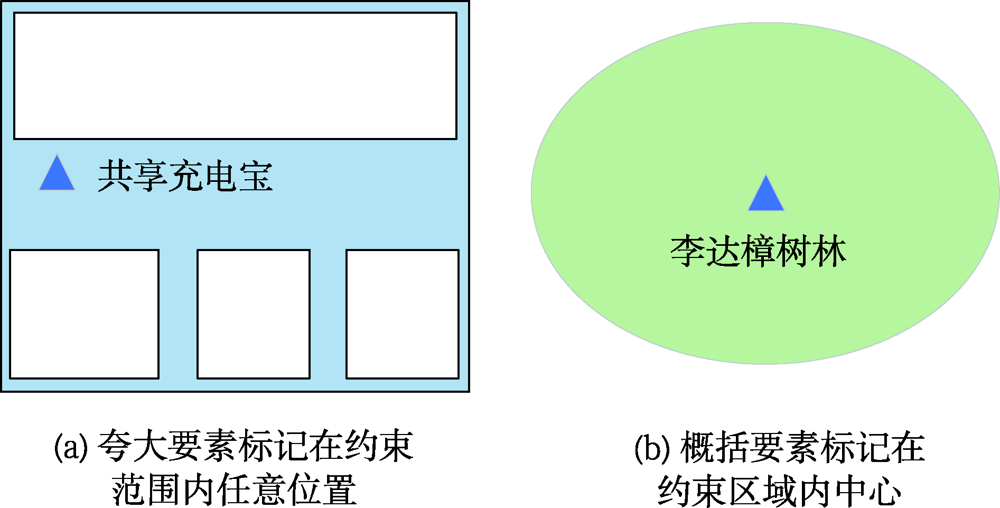
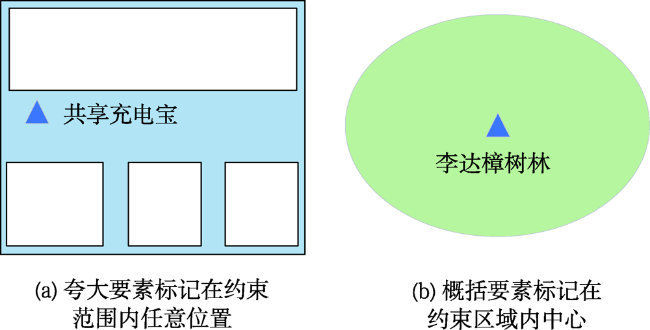
| 地理对象 范围 | 夸大要素 | 标记点范围大于地理对象在图上的实际大小 |
| 概括要素 | 标记点范围小于地理对象在图上的实际大小 | |
| 临街 | 临街 | 与道路具有直接连通关系 |
| 非临街 | 与道路无直接连通关系 | |
| 出入口 | 出入口 | 进入建筑物或特定的场地所经过的门或关卡 |
| 非出入口 | 不承担出入口功能 |
表2 POI优化前后各项指标对比Tab. 2 Comparison of various indicators before and after POI optimization |
| 优化 次数 | 修改位置 点数量 | 错标率/% | 可辨 识度/% | ||
|---|---|---|---|---|---|
| 优化前 | 0 | 0 | 19.3 | 92.1 | 725.78 |
| 位置选择阶段 | 1 | 82 | 0.0 | 97.5 | 660.52 |
| 位置优化阶段 | 2 | 46 | 0.0 | 98.8 | 642.75 |
| [1] |
邵蕾. 网络POI数据增量更新技术研究[D]. 兰州: 兰州交通大学, 2016.
[
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
王勇, 罗安, 曹元晖, 等. 语义因子支持的多源POI分类信息一致化处理[J]. 测绘科学, 2019, 44(6):285-290.
[
|
| [6] |
王勇, 刘纪平, 郭庆胜, 等. 顾及位置关系的网络POI地址信息标准化处理方法[J]. 测绘学报, 2016, 45(5):623-630.
[
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
徐智邦, 王中辉, 闫浩文, 等. 结合POI数据的道路自动选取方法[J]. 地球信息科学学报, 2018, 20(2):159-166.
[
|
| [11] |
王闯, 李帅, 丁杨, 等. 基于POI的基础地理信息数据库点状要素更新方法研究[J]. 测绘与空间地理信息, 2020, 43(7):77-78,83,87.
[
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
陈瑞, 刘纪平, 王勇, 等. 一种自动提取控制点的多源兴趣点位置纠正方法[J]. 测绘科学, 2014, 39(5):61-64.
[
|
| [16] |
张云菲. 多源道路网与兴趣点的一致性整合方法[D]. 武汉: 武汉大学, 2015.
[
|
| [17] |
曹亚妮, 吴芳华, 王丽君, 等. 基于元拓扑关系的线面空间关系集成表达模型[J]. 武汉大学学报·信息科学版, 2016, 41(1):123-130.
[
|
| [18] |
景海涛, 原世伟, 李伟. 警力快速响应及其空间布局优化[J]. 测绘工程, 2017, 26(1):42-46.
[
|
| [19] |
马明明, 龚建华, 李文航, 等. 基于虚拟眼动实验的指向型应急疏散标识布局优化方法[J]. 武汉大学学报·信息科学版, 2020, 45(9):1386-1394.
[
|
| [20] |
孙立, 王中辉, 孙立坚, 等. 城市派出所空间位置优化及警力分配[J]. 地球信息科学学报, 2019, 21(3):346-358.
[
|
| [21] |
卢威, 艾廷华. 利用三角剖分骨架图提取简单多边形目标中心点[J]. 武汉大学学报·信息科学版, 2020, 45(3):337-343.
[
|
| [22] |
朱洁, 黄樟灿, 彭晓琳. 基于离散Fréchet距离的判别曲线相似性的算法[J]. 武汉大学学报·理学版, 2009, 55(2):227-232.
[
|
| [23] |
|
/
| 〈 |
|
〉 |

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}