
服务于空天协同对地观测的语义信息模型构建
|
卢万杰(1991— ),男,河南焦作人,讲师,主要从事无人机遥感数据解译与应用方面的研究。E-mail: lwj285149763@163.com |
收稿日期: 2022-01-19
修回日期: 2022-03-04
网络出版日期: 2022-10-25
基金资助
国家自然科学基金项目(41901378)
国家自然科学基金项目(42001338)
Construction of Semantic Information Model for Aerospace Cooperation Earth Observation
Received date: 2022-01-19
Revised date: 2022-03-04
Online published: 2022-10-25
Supported by
National Natural Science Foundation of China(41901378)
National Natural Science Foundation of China(42001338)
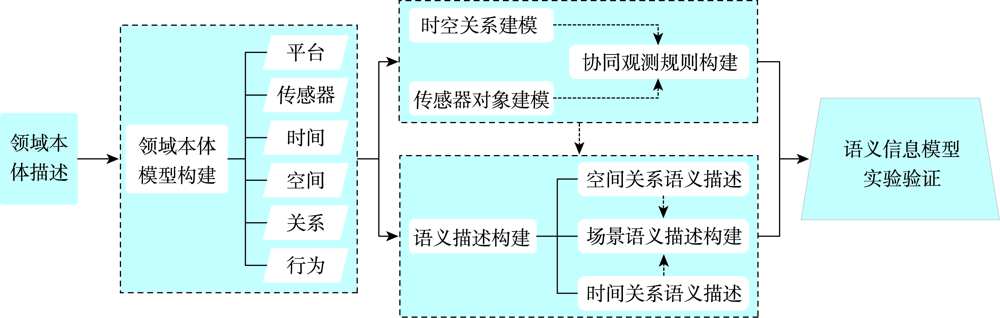
空天协同对地观测技术快速发展,通过空天协同对地观测的语义信息建模获取信息和知识是服务于对地观测任务执行和规划制定的重要手段之一。为有效获取空天协同对地观测平台运行状态信息并服务于对地观测任务,提出构建服务于空天协同对地观测的语义信息模型。首先,设计空天协同对地观测平台领域本体,围绕时空关系和传感器对象建模,针对典型应用需求制定空天协同对地观测规则;然后,构建空天协同对地观测领域内时间和空间关系的语义描述,结合静态和动态场景语义表达,实现对空天协同对地观测场景的语义描述;最后,构建语义信息服务实验系统,验证模型与方法的效果。结果表明,所提模型与方法能够有效描述与展示空天协同对地观测平台的运行状态和执行任务情况,有助于对地观测任务规划和决策制定。
卢万杰 , 刘伟 , 牛朝阳 , 谢丽敏 , 吕亮 . 服务于空天协同对地观测的语义信息模型构建[J]. 地球信息科学学报, 2022 , 24(8) : 1421 -1431 . DOI: 10.12082/dqxxkx.2022.220036
Earth observation technology is an important tool to obtain geospatial information and has now entered the stage of multi-platform and multi-sensor. Obtaining information and knowledge through the semantic modeling of aerospace cooperation earth observation is one of the important methods for the execution and planning of earth observation missions. To monitor the platform operation of aerospace cooperation earth observation and extract information and knowledge to serve the earth observation, a semantic model for aerospace cooperation earth observation is proposed. Firstly, the basic description of the domain ontology for aerospace cooperation earth observation platform is established, which can assist the clarification of research contents. Secondly, considering the correlation between different earth observation platforms and starting from the aspects of platform, sensor, time, and space, the domain ontology for aerospace cooperation earth observation platform is constructed based on Basic Formal Ontology, which is described by using six tuples. Thirdly, based on the modeling of spatiotemporal relationships and sensor objects, the cooperation observation rules for typical applications are formulated according to typical application requirements, to serve the evaluation and decision-making of aerospace cooperation earth observation tasks. Then, the semantic descriptions of spatiotemporal relationships are constructed, and the comprehensive semantic description of aerospace cooperation earth observation is realized by combining the semantic description of static and dynamic scenarios. Finally, in order to verify the domain ontology and semantic description for aerospace cooperation earth observation platform, based on the micro-service architecture and 3-dimension visualization framework, the service experimental system is built to verify the effectiveness of proposed models and methods, which takes Zhengzhou, the provincial capital of Henan, as an example. The aero-based and space-based earth observation platforms are used by the service experimental system to carry out the observation tasks, and the activities of aerospace cooperation earth observation are displayed in real time. Based on the cooperation observation rules, recommendations for the selection of the earth observation platform are given. Results show that the proposed models and methods can effectively represent and display the semantic information of operation status and task performance of aerospace cooperation earth observation, which can be used for mission planning and decision-making of earth observation. In follow-up research, a more refined semantic information model of aerospace cooperation earth observation will be constructed to support more complex earth observation scenarios. At the same time, the construction of cooperative observation rules under different application scenarios will be fully considered, and more accurate and detailed information will be provided for earth observation activities by reasoning.
表1 时间段拓扑关系表示Tab. 1 Topology relations of time ranges |
| 拓扑关系 | 公式示例 | 说明 |
|---|---|---|
| 相离 | 时间段 晚于时间段 | |
| 相等 | 时间段 等于时间段 | |
| 相交 | 时间段 晚于时间段 ,且两者相交 | |
| 包含 | 时间段 包含时间段 | |
| 相接 | 时间段 晚于时间段 ,且 起始时刻等于 终止时刻 |
表2 时间点与时间段拓扑关系表示Tab. 2 Topology relations between time ranges and time instants |
| 拓扑关系 | 公式示例 | 说明 |
|---|---|---|
| 相离 | 时间点 早于时间段 | |
| 包含 | 时间段 包含时间点 | |
| 相接 | 时间段 起始时刻等于 |
表3 时间关系量化表示与语义表示映射Tab. 3 Mapping of quantitative and semantic representation of time relations |
| 时间关系 | 拓扑关系 | 关系谓词 |
|---|---|---|
| 时间点关系 | 相离 | 早于(before) |
| 相等 | 等于(equal) | |
| 时间段关系 | 相离 | 晚于(after) |
| 相等 | 等于(equal) | |
| 相交 | 交叉(intersect) | |
| 包含 | 介于(between) | |
| 相接 | 紧邻(close) | |
| 时间点与时间段关系 | 相离 | 早于(before) |
| 包含 | 介于(between) | |
| 相接 | 开始于(beginWith) |
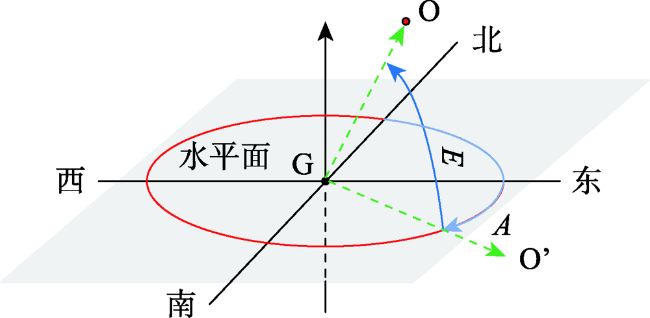
表4 空间方位关系量化表示与语义表示映射Tab. 4 Mapping of quantitative and semantic representation of space orientation relations |
| 方位角范围 | 方位语义描述 | 模糊描述 |
|---|---|---|
| 正北方向 | - | |
| 东偏北 | 东北方 | |
| 正东方向 | - | |
| 东偏南 | 东南方 | |
| 正南方向 | - | |
| 西偏南 | 西南方 | |
| 正西方向 | - | |
| 西偏北 | 西北方 |
表5 9IM量化表示与语义表示映射Tab. 5 Mapping of quantitative and semantic representation of 9IM |
| 语义描述 | 九交模型 | 语义描述 | 九交模型 |
|---|---|---|---|
| 相离 | 相接 | ||
| 交叠 | 覆盖 | ||
| 包含 | 相等 | ||
| 被覆盖 | 在内部 |
表6 实验设定的无人机及传感器性能信息Tab. 6 Platform and sensor performance of UAV in experiment |
| 无人机名称 | 部署位置 | 平台 | 传感器 | |||
|---|---|---|---|---|---|---|
| 经度/° | 纬度/° | 续航时间/h | 覆盖范围/(km2/h) | 类型 | 分辨率/m | |
| UAV_RTK_01 | 113.57 | 35.10 | 12 | 40 | 光学 | 1.20 |
| UAV_RTK_02 | 112.77 | 34.92 | 13 | 45 | 光学 | 0.40 |
| UAV_RTK_03 | 114.28 | 34.79 | 15 | 50 | 光学 | 0.50 |
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
晏磊, 廖小罕, 周成虎, 等. 中国无人机遥感技术突破与产业发展综述[J]. 地球信息科学学报, 2019, 21(4):476-495.
[
|
| [5] |
|
| [6] |
李德仁. 论空天地一体化对地观测网络[J]. 地球信息科学学报, 2012, 14(4):419-425.
[
|
| [7] |
李军, 李军, 钟志农, 等. 基于SWE的空天资源对地观测协同任务规划服务模型[J]. 国防科技大学学报, 2013, 35(3):108-113.
[
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
陈能成, 杨训亮, 王晓蕾. 地理空间传感网信息公共服务平台的设计与实现[J]. 地球信息科学学报, 2013, 15(6):887-894,917.
[
|
| [12] |
|
| [13] |
朱玲, 董燕, 杨峰. 基本形式化本体的研究进展[J]. 中国实验方剂学杂志, 2018, 24(2):208-212.
[
|
| [14] |
段宇锋, 黄思思. 基于BFO构建中文植物物种多样性领域本体的研究[J]. 现代图书情报技术, 2015, 31(12):72-79.
[
|
| [15] |
|
| [16] |
朱彦, 郑捷, 李晓瑛, 等. 基本形式化本体及其中文版介绍[J]. 医学信息学杂志, 2021, 42(1):24-28,60.
[
|
| [17] |
曹启程, 朱欣焰, 吴瑞龙, 等. 基于本体的遥感数据需求文本时间获取及其语义计算[J]. 武汉大学学报·信息科学版, 2021, 46(7):1114-1122.
[
|
| [18] |
李小龙. 支持动态数据管理与时空过程模拟的实时GIS数据模型研究[D]. 武汉: 武汉大学, 2014.
[
|
| [19] |
禄小敏, 闫浩文, 王中辉. 群组目标空间方向关系建模[J]. 地球信息科学学报, 2018, 20(6):721-729.
[
|
| [20] |
王占刚, 吴自兴, 王想红. 语义尺度影响的相离区域合并与拓扑关系计算[J]. 武汉大学学报·信息科学版, 2018, 43(11):1712-1718.
[
|
/
| 〈 |
|
〉 |






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}