
一种自适应时间步长的场地地表污染扩散元胞自动机仿真模型
|
王信雷(1997-),男,江西上饶人,硕士生,研究方向为地理信息系统。E-mail: xinleical@163.com |
收稿日期: 2022-02-22
修回日期: 2022-04-12
网络出版日期: 2023-01-25
基金资助
国家重点研发计划项目(2019YFC1804304)
国家自然科学基金项目(41771478)
中央高校基本科研业务费专项资金项目(2019B02514)
A Cellular Automata Simulation Model of Site Surface Pollution Diffusion with Adaptive Time Step
Received date: 2022-02-22
Revised date: 2022-04-12
Online published: 2023-01-25
Supported by
National Key Research and Development Program of China(2019YFC1804304)
National Natural Science Foundation of China(41771478)
Fundamental Research Funds for the Central Universities(2019B02514)
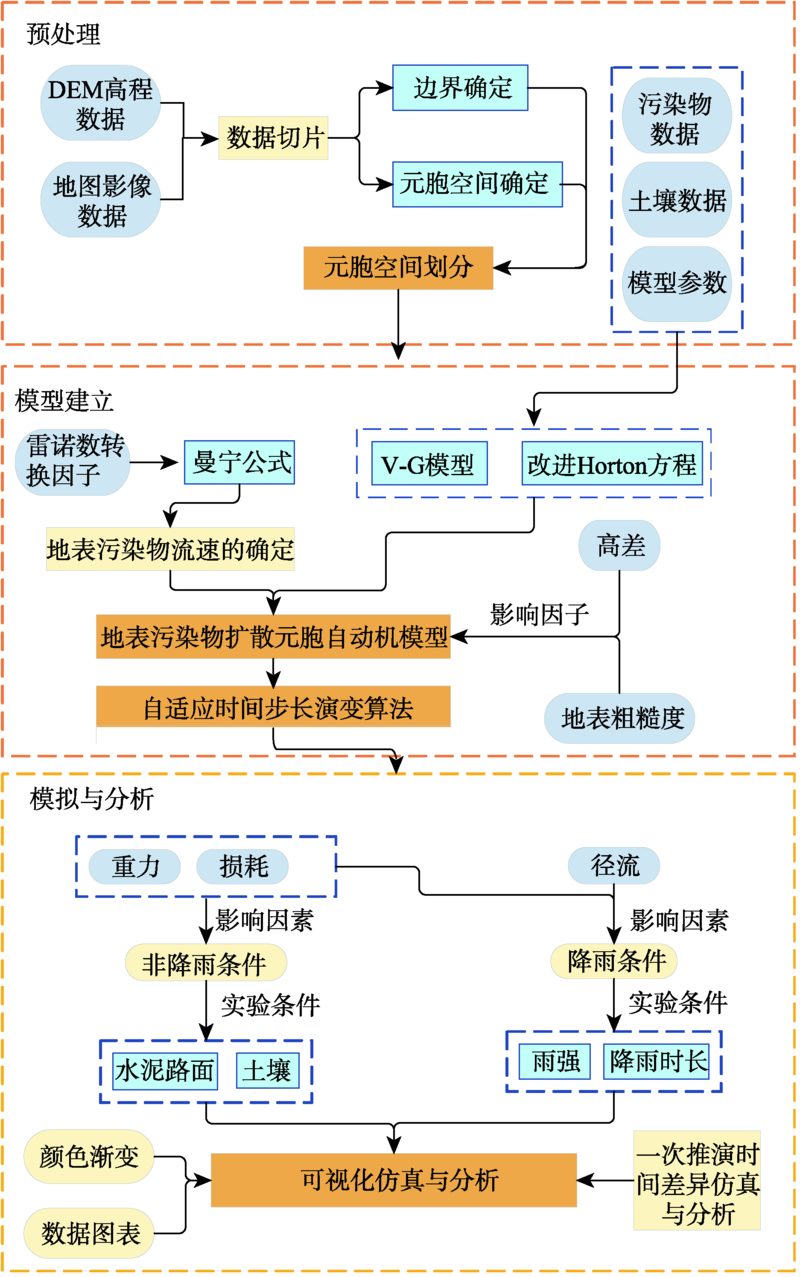
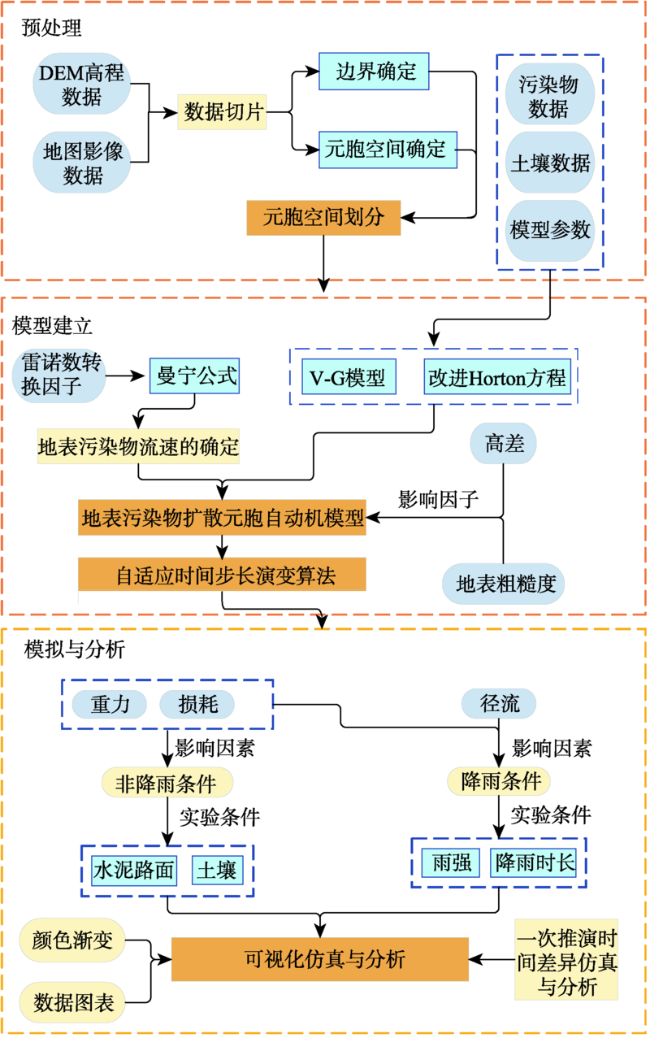
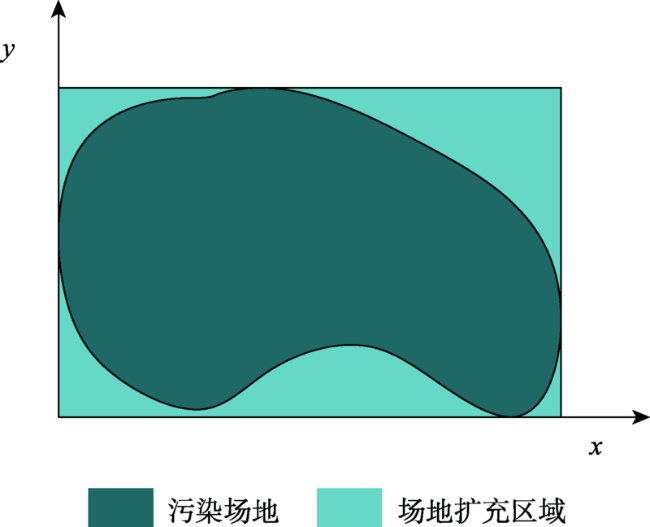
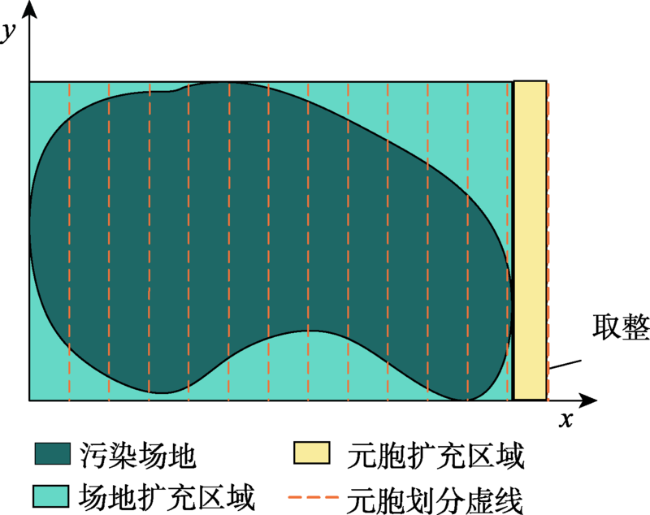
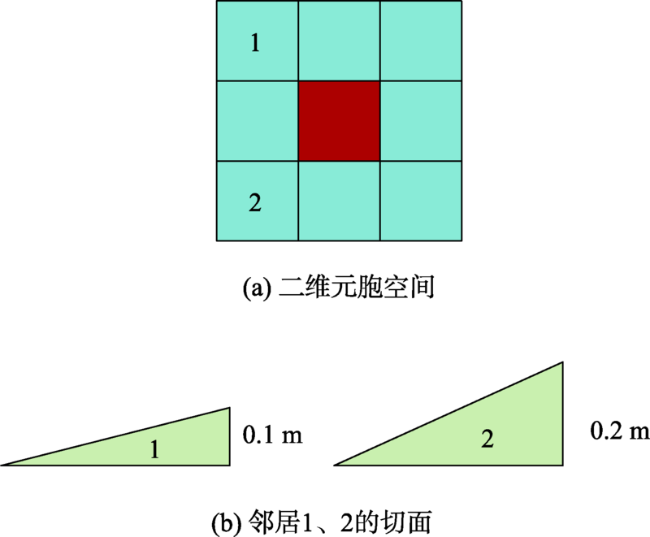
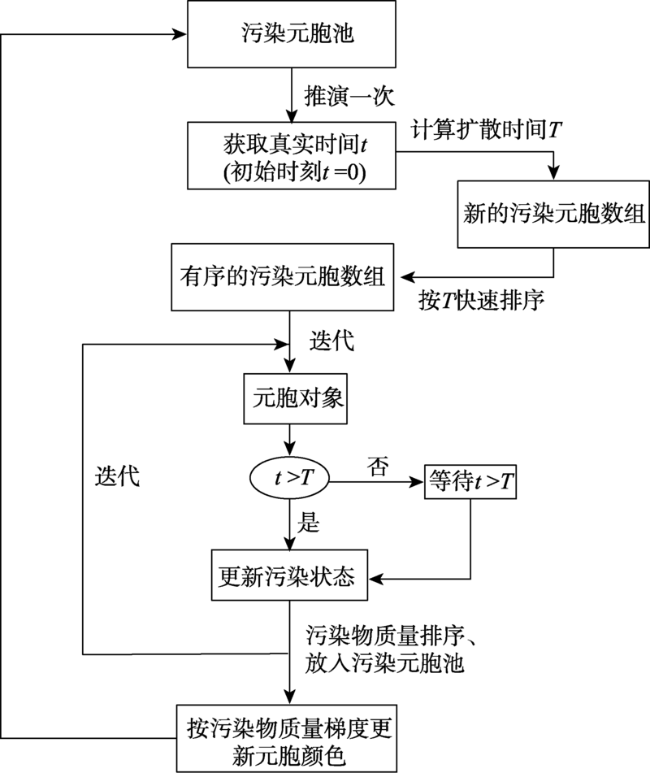
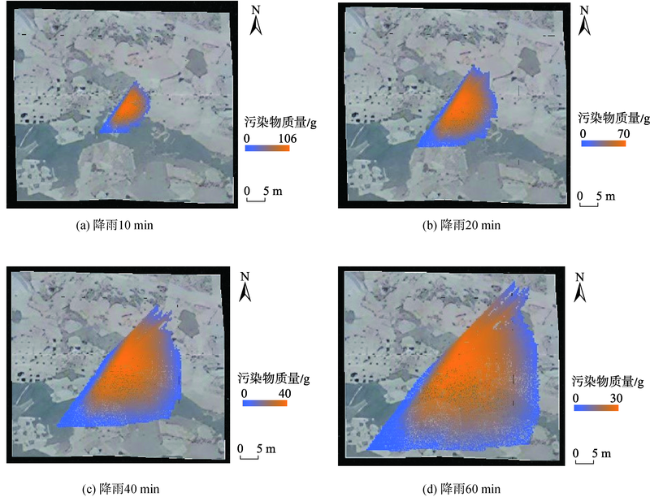
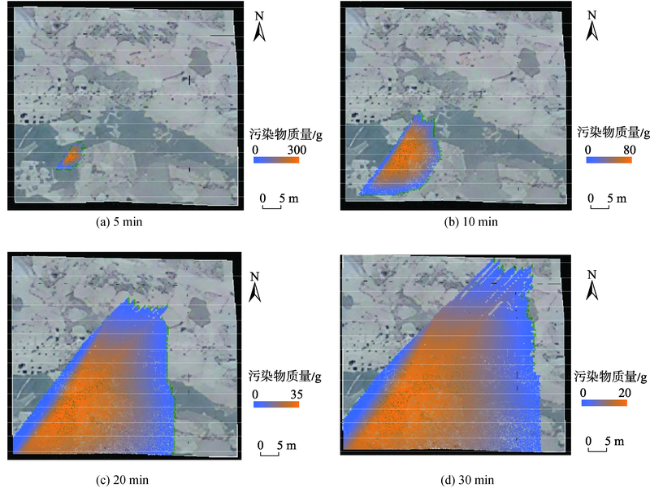
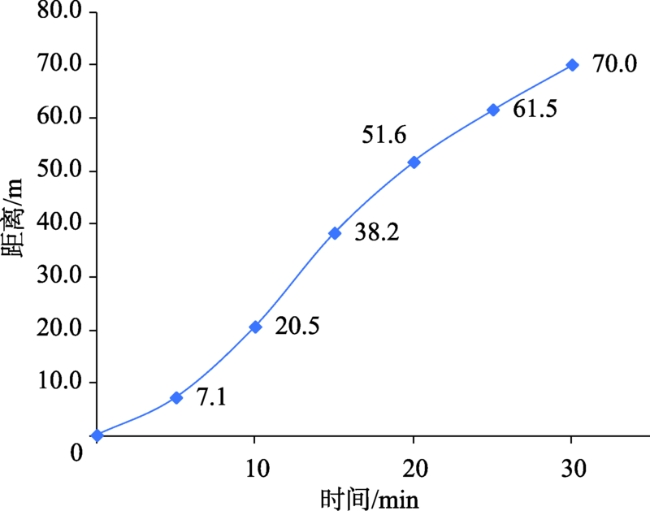
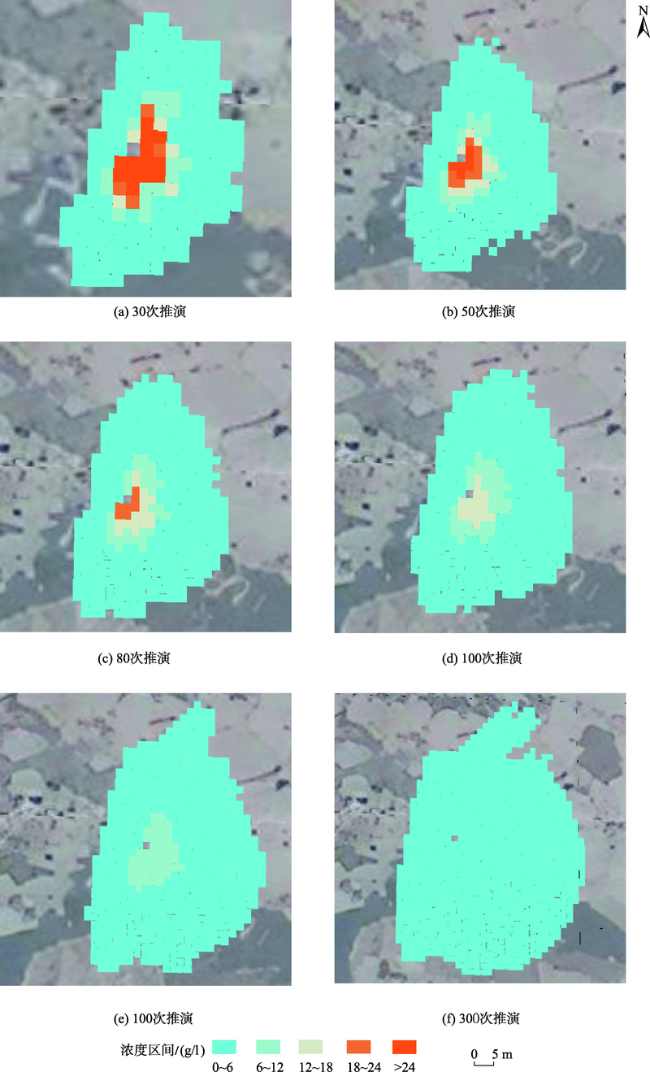
针对传统扩散模型难以动态模拟地表污染物时空不均匀扩散过程的问题,本文提出一种基于元胞自动机模型的污染物地表扩散仿真模型,在综合考虑地表高差及粗糙度对污染物扩散过程影响的基础上,确定了不规则污染场地的元胞边界条件、划分了元胞空间、提出了一种降雨和非降雨条件下污染物扩散流速计算方法,基于分子扩散建立了地表污染扩散模型演变规则。为更好模拟地表污染物扩散情况,本文提出了一种污染物随坡度和质量衰减的元胞自适应时间步长调整算法,该算法能够动态调整元胞自动机的时间步长,防止固定时间步长在污染物快速扩散时错过细节,而缓慢扩散时消耗计算资源。实验设计了降雨和非降雨两种情形对污染物随时间扩散的过程进行仿真与分析。实验结果表明,不同下垫面对污染物扩散速度有很大的影响,污染物在糙率为0.012的水泥地表上的扩散速度约为其在糙率为0.035的一般性土壤地表上的2.7倍;降雨强度和时长能够加快污染物的扩散,且扩散速度随着降雨曲线变化而改变,并在雨强峰值附近达到最大;污染物扩散服从坡度分布特征,且随着时间变化,高污染区域范围和污染物浓度差异渐渐变小,并在一段时间后,浓度变化渐渐趋于平稳;自适应时间步长演变算法能够较好地体现一次演变过程中污染物扩散在不同邻域元胞方向上的细微时间差异,提高污染物时空分布的计算精度。
王信雷 , 芮小平 , 谢宜霖 , 朱益虎 , 杨蕴 . 一种自适应时间步长的场地地表污染扩散元胞自动机仿真模型[J]. 地球信息科学学报, 2022 , 24(11) : 2071 -2088 . DOI: 10.12082/dqxxkx.2022.220077
Aiming at the problem that it is difficult for traditional pollution simulation models to simulate the uneven diffusion process of surface pollutants dynamically in time and space, this paper proposes a surface pollutants diffusion simulation model based on cellular automata model. In this paper, surface slope and surface roughness are considered as the main factors affecting the diffusion process of pollutants. Based on the irregular contaminated site area, the boundary conditions of the cell were firstly determined to obtain the whole cell space, and then the whole cell space was divided into regular cells. After that, a method for calculating the diffusion velocity of pollutants under rainfall and non-rainfall conditions was proposed. Finally, based on the molecular diffusion rules, The evolution rules of surface pollutant diffusion model under rainfall and non-rainfall conditions were established. For better simulating surface pollutant diffusion, this paper proposes a cellular adaptive time step adjustment algorithm, in which pollutant quality decay with surface slope and pollutant gravity. This algorithm can adjust the cellular automata time step automatically and dynamically, so as to prevent cellular automata model with fixed time steps from missing details when pollution spread quickly and computing resources wasting when they spread slowly. In this paper, two experiments which consider rainfall and non-rainfall conditions respectively are designed to simulate the diffusion process of pollutants over time. The experimental results show that different underlying layers have a great influence on the diffusion rate of pollutants; the diffusion velocity of pollutants on the cement surface with a roughness of 0.012 is about 2.7 times of that on a general soil surface with a roughness of 0.035; under rainfall conditions, the pollution diffusion velocity increases with the increase of rainfall intensity and duration, the diffusion velocity changes with the change of rainfall curve, and reaches the maximum near the peak of rainfall intensity; the pollution diffusion simulation results obey the slope distribution characteristics of the site; with the change of time, the range of high pollution area gradually decreases, and the difference in pollutant concentration between adjacent locations also gradually decreases, and after a period of time, this change gradually becomes stable; in the process of a model evolution, surface pollutants will have subtle differences in diffusion time in different neighborhood cell directions, and the adaptive time step evolution algorithm can better reflect this difference, so it can better improve the calculation accuracy of spatial and temporal distribution of pollutants.
| [1] |
中华人民共和国环境保护部. 场地环境调查技术导则:HJ 25.1—2014[S]. 北京: 中国环境科学出版社, 2014.
[ Ministry of Environmental Protection of the People's Republic of China. Technical guidelines for site environmental site investigation: HJ 25.1—2014[S]. Beijing: China Environmental Science Press, 2014. ]
|
| [2] |
苑克帅. 我国污染场地再开发风险管控法律规制研究[D]. 重庆: 西南政法大学, 2016.
[
|
| [3] |
张亦弛. 工业搬迁遗留场地环境风险管理体系研究[D]. 西安: 长安大学, 2012.
[
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
赵莉, 杨俊, 李闯, 等. 地理元胞自动机模型研究进展[J]. 地理科学, 2016, 36(8):1190-1196.
[
|
| [8] |
谢志文, 王海军, 张彬, 等. 城市扩展元胞自动机多结构卷积神经网络模型[J]. 测绘学报, 2020, 49(3):375-385.
[
|
| [9] |
|
| [10] |
|
| [11] |
惠珊, 芮小平, 李尧. 一种耦合元胞自动机的改进林火蔓延仿真算法[J]. 武汉大学学报·信息科学版, 2016, 41(10):1326-1332.
[
|
| [12] |
|
| [13] |
|
| [14] |
高华, 代侦勇. 基于改进元胞自动机的水污染扩散模拟[J]. 测绘地理信息, 2020, 45(6):138-140.
[
|
| [15] |
王璐, 谢能刚, 李锐, 等. 基于元胞自动机的水体污染带扩散漂移仿真[J]. 水利学报, 2009(4):481-485.
[
|
| [16] |
周成虎, 欧阳, 马廷, 等. 地理系统模拟的CA模型理论探讨[J]. 地理科学进展, 2009, 28(6):833-838.
[
|
| [17] |
|
| [18] |
于瑞云, 赵金龙, 余龙, 等. 结合轴对齐包围盒和空间划分的碰撞检测算法[J]. 中国图象图形学报, 2018, 23(12):1925-1937.
[
|
| [19] |
沈敬伟, 彭安琪, 周廷刚, 等. 基于并行元胞自动机的水体污染物扩散模拟[J]. 测绘科学技术学报, 2016, 33(1):105-110.
[
|
| [20] |
|
| [21] |
李玉茹, 杨勤科, 王春梅, 等. 面向地形类型区分的地表粗糙度算法比较研究[J]. 西北农林科技大学学报(自然科学版), 2019, 47(8):134-143.
[
|
| [22] |
张光辉. 坡面薄层流水动力学特性的实验研究[J]. 水科学进展, 2002. 13(2):159-165.
[
|
| [23] |
赵振国, 黄春花. 明渠均匀流研究[J]. 水利学报, 2013, 44(12):1482-1487.
[
|
| [24] |
张宽地, 王光谦, 王占礼, 等. 人工加糙床面薄层滚波流水力学特性试验[J]. 农业工程学报, 2011, 27(4):28-34.
[
|
| [25] |
吴望一. 流体力学[M]. 北京: 北京大学出版社,1982-1983.
[
|
| [26] |
刘家琳, 张建林. 基于SWMM模型的山坡型公园子汇水区地表产流特征——以重庆地区为例[J]. 中国园林, 2018, 34(6):81-87.
[
|
| [27] |
薛文宇. 城市暴雨积水及街道洪水模拟模型研究[D]. 天津: 天津大学, 2016.
[
|
| [28] |
|
| [29] |
史振宁, 戚双星, 付宏渊, 等. 降雨入渗条件下土质边坡含水率分布与浅层稳定性研究[J]. 岩土力学, 2020, 41(3):980-988.
[
|
| [30] |
范严伟, 赵文举, 毕贵权. Van Genuchten模型参数变化对土壤入渗特性的影响分析[J]. 中国农村水利水电, 2016(3):52-56.
[
|
| [31] |
杨坪坪, 王云琦, 张会兰, 等. 降雨强度和单宽流量与地表粗糙度交互作用下坡面流阻力特征[J]. 农业工程学报, 2018, 34(6):145-151.
[
|
| [32] |
张宽地, 王光谦, 孙晓敏, 等. 模拟植被覆盖条件下坡面流水动力学特性[J]. 水科学进展, 2014, 25(6):825-834.
[
|
| [33] |
程娅姗, 王中根, 李军, 等. 确定坡面径流过程曼宁糙率系数的实验方法研究[J]. 地理科学进展, 2020, 39(4):651-659.
[
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}