
基于等角边界距离相似性的遥感影像面状图斑匹配研究
|
陈 军(1979— ),男,四川南充人,副教授,主要从事地理信息与人工智能,地理信息系统开发与集成研究。E-mail: cj@cuit.edu.cn |
收稿日期: 2022-03-16
修回日期: 2022-05-20
网络出版日期: 2023-01-25
基金资助
四川省科技计划项目(2020YFG0146)
国家重点研发计划项目(2018YFB0505300)
A Target Matching Method for Remote Sensing Image Patches based on Equiangular Boundary Distance Similarity
Received date: 2022-03-16
Revised date: 2022-05-20
Online published: 2023-01-25
Supported by
Sichuan Science and technology planning project(2020YFG0146)
National Key Research and Development Program of China(2018YFB0505300)
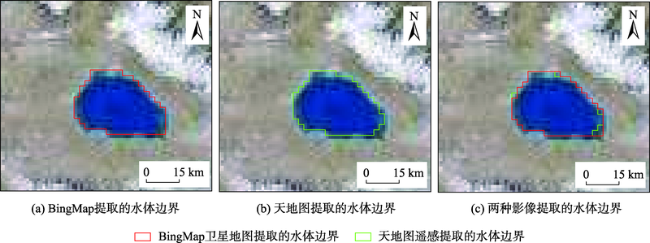
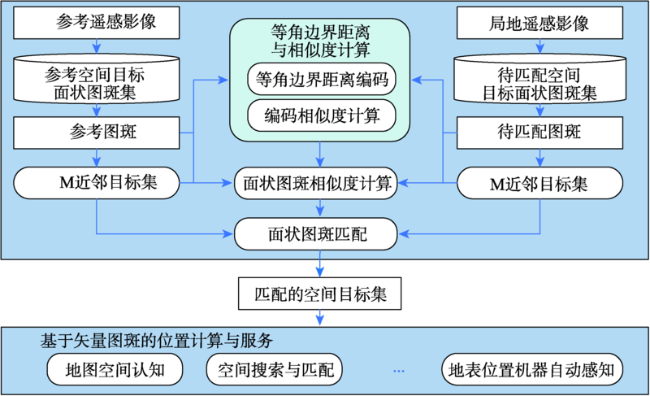
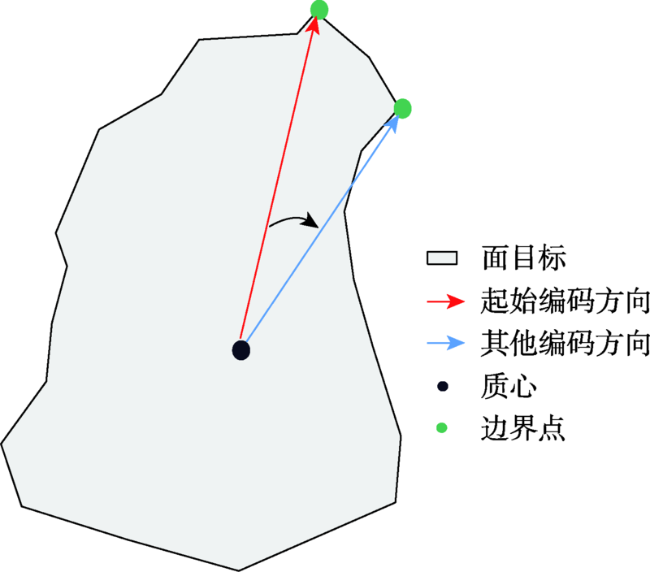
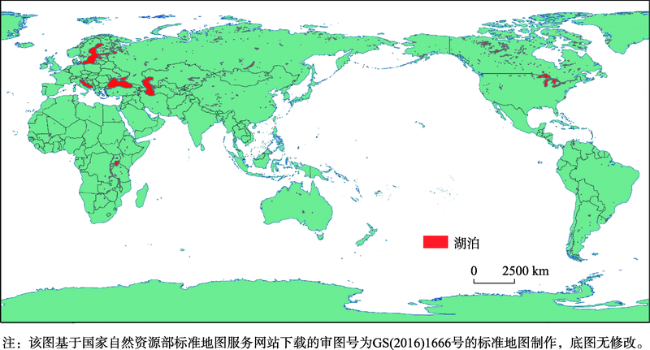
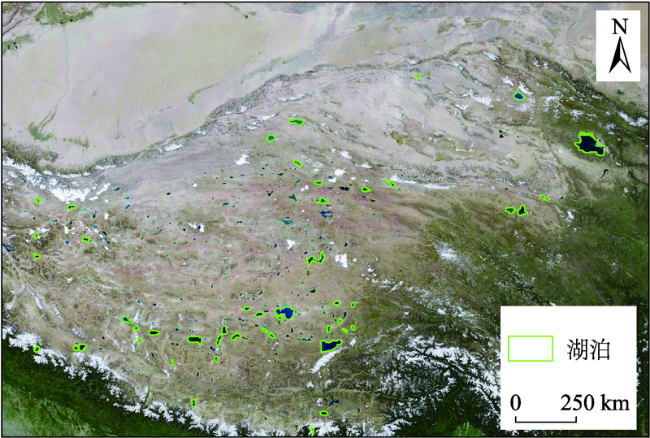
基于形态特征的目标匹配是地图空间认知、地表位置自动感知等领域的重要方法。然而,由于不同数据源的遥感影像提取的同一个空间目标在空间尺度和局部形态上存在一定的差异,现有形态匹配算法难以获得较高的匹配精度。本文以等角边界距离编码及相似性算法为核心,提出了面向遥感影像的面状图斑匹配方法。① 从面目标的质心以10°为间隔,顺时针方向从质心向外引36条射线,获取面目标的边缘点,形成等角边界距离编码;② 提出了与该编码相适应的几个综合形态指标,包括自相似度、圆形度、形态复杂度和质心偏移度,并建立了面状图斑相似度算法;在此基础上,结合近邻目标的形态相似度,构建了遥感影像面状图斑匹配算法;③ 从不同数据源的在线遥感影像上提取中国西部湖泊与全球湖泊,开展面状图斑匹配实验。通过实验,发现本文的面状图斑相似度算法相对于按距离采样的相似度算法,召回率提升了13.8%;在添加近邻目标相似度约束的基础上,面状图斑匹配精度达到90%以上。通过算法适应性分析,发现该算法在一定的投影变形下仍能保持一定的匹配精度;如果空间目标及其邻域目标的总体形态和分布接近,不同空间尺度的匹配精度保持在80%以上。本文的研究为地图空间认知、地表位置机器自动感知提供了新的思路和方法。

陈军 , 马世岩 , 陈玲 , 江明桦 . 基于等角边界距离相似性的遥感影像面状图斑匹配研究[J]. 地球信息科学学报, 2022 , 24(11) : 2234 -2244 . DOI: 10.12082/dqxxkx.2022.220122
Target matching based on morphological characteristics is a key technical method in the fields of spatial cognition of maps and automatic perception of surface locations. However, due to the differences in spatial scale and local morphology of spatial targets extracted from different remote sensing images, it is difficult to use existing shape matching algorithms to obtain high matching accuracy. In this study, based on the equiangular boundary distance coding and similarity algorithm, a method of matching remote sensing image patches is proposed. Specifically, first, from the centroid of a surface target, 36 lines are created in a clockwise direction with intervals (10°) to obtain the boundary points of the surface target, a process referred to as equiangular boundary distance coding. Then, several shape indices are proposed for the boundary points, including the self-similarity, circularity, shape complexity, and centroid offset, based on which a shape similarity algorithm for surface targets is established. Furthermore, based on the shape similarity of neighboring targets, a matching algorithm for remote sensing image patches is proposed. Finally, the lakes at the global scale and in the western China are extracted from online remote sensing images of different data sources to carry out the matching experiments. Based on the experiments, we found that the recall rate of the algorithm proposed in this paper is improved by 13.8% compared to the similarity algorithm sampled by distance. The precision reaches more than 90% when the similarity of the neighbor targets is considered. Through algorithm adaptation analysis, our proposed algorithm can still maintain a reasonable matching accuracy with certain projection deformation. If the overall morphology and spatial distribution of targets and their neighboring targets are similar, the matching accuracy of different spatial scales could be maintained above 80%. This paper provides new ideas and methods for spatial cognition of maps and automatic perception of surface locations.
表1 不同形态相似度计算方法的性能与效果对比Tab. 1 Performance and effect comparison of different morphological similarity calculation methods |
| 算法 | 排名条件对应的期望目标数量/个 | 最低排名 | 召回率/% | 总耗时/s | 平均耗时/s | |||
|---|---|---|---|---|---|---|---|---|
| 1 | 2 | [3,10] | >10 | |||||
| 算法A | 13 | 2 | 3 | 11 | 292 | 44.8 | 16.0 | 0.552 |
| 算法B | 4 | 3 | 4 | 18 | 781 | 13.8 | 63.0 | 2.172 |
| 算法C | 15 | 6 | 4 | 4 | 141 | 51.7 | 8.0 | 0.276 |
| 算法D | 17 | 4 | 5 | 3 | 104 | 58.6 | 8.0 | 0.276 |
表2 算法D不同排名条件下的相似度统计Tab. 2 Similarity obtained by algorithm D in different rank ranges |
| 排名 | 期望目标总数/个 | 期望目标数量占比/% | 平均相似度 | 最小相似度 |
|---|---|---|---|---|
| 1 | 17 | 58.6 | 0.943 | 0.879 |
| ≤2 | 21 | 72.4 | 0.935 | 0.833 |
| ≤10 | 26 | 89.7 | 0.929 | 0.833 |
| All | 29 | 100.0 | 0.921 | 0.821 |
表3 不同M值对应的包含相同近邻目标的目标数量统计Tab. 3 Number of targets with the same neighboring target in both datasets at different M values |
| M | 目标数量/个 | 百分比/% |
|---|---|---|
| 1 | 18 | 62.1 |
| 2 | 24 | 82.8 |
| 3 | 26 | 89.7 |
| 4 | 28 | 96.6 |
表4 不同N值对应的目标匹配精度Tab. 4 Matching accuracy at different N values |
| N | 正确匹配数/个 | 错误匹配数/个 | 漏匹配数/个 | 召回率/% | 精确率/% |
|---|---|---|---|---|---|
| 1 | 22 | 2 | 5 | 75.9 | 91.7 |
| 2 | 27 | 0 | 2 | 93.1 | 100.0 |
| 3 | 26 | 1 | 2 | 89.7 | 96.3 |
| 4 | 26 | 1 | 2 | 89.7 | 96.3 |
表5 不同投影变形下的目标匹配精度Tab. 5 Target matching accuracy under different projection distortions |
| 坐标系 | 正确匹配数/个 | 错误匹配数/个 | 漏匹配数/个 | 召回率/% | 精确率/% |
|---|---|---|---|---|---|
| Beijing_1954_GK_Zone_18N | 27 | 0 | 2 | 93.1 | 100.0 |
| UTM_Zone_47N | 27 | 0 | 2 | 93.1 | 100.0 |
| UPS_North | 27 | 0 | 2 | 93.1 | 100.0 |
| COB_NAD83_2007 | 27 | 0 | 2 | 93.1 | 100.0 |
| Asia_North_Equidistant_Conic | 24 | 1 | 4 | 82.8 | 96.0 |
| Albers_Conic_Equal_Area | 24 | 2 | 3 | 82.8 | 92.3 |
| GCS_WGS_1984 | 17 | 4 | 8 | 58.6 | 81.0 |
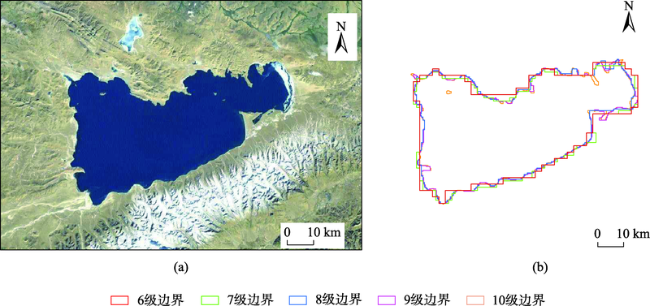
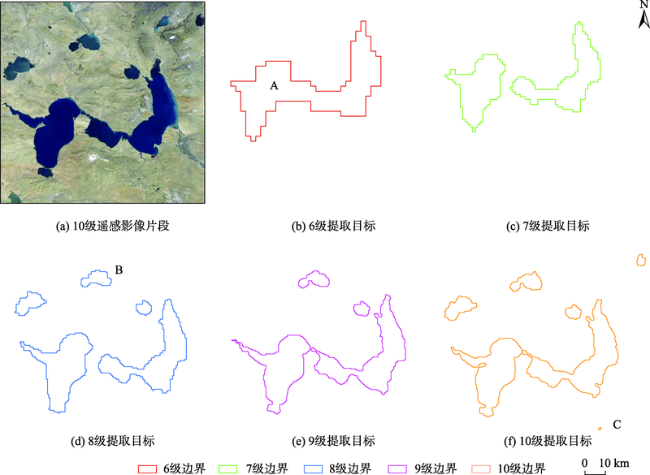
表6 不同空间尺度下的目标匹配精度Tab. 6 Target matching accuracy at different spatial scales |
| 地图级别 | 总目标数/个 | 期望目标数/个 | 正确匹配数/个 | 错误匹配数/个 | 召回率/% | 精确率/% |
|---|---|---|---|---|---|---|
| 7 | 68 | 32 | 20 | 2 | 62.5 | 90.9 |
| 8 | 89 | 30 | 13 | 2 | 43.3 | 86.7 |
| 9 | 105 | 34 | 12 | 3 | 35.3 | 80.0 |
| 10 | 124 | 35 | 9 | 6 | 25.7 | 60.0 |
表7 仅保留期望湖泊的情况下不同空间尺度下的目标匹配精度Tab. 7 Target matching accuracy at different spatial scales when only the desired lakes are retained |
| 地图级别 | 正确匹配数/个 | 错误匹配数/个 | 召回率/% | 精确率/% |
|---|---|---|---|---|
| 7 | 26 | 2 | 81.3 | 92.9 |
| 8 | 22 | 1 | 73.3 | 95.7 |
| 9 | 20 | 2 | 58.8 | 90.9 |
| 10 | 18 | 4 | 51.4 | 81.8 |
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
温伯威, 孙群, 马超, 等. 一种采用不变矩的矢量面目标匹配方法[J]. 测绘工程, 2017, 26(2):5-8,13.
[
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
郭黎, 崔铁军, 郑海鹰, 等. 基于空间方向相似性的面状矢量空间数据匹配算法[J]. 测绘科学技术学报, 2008, 25(5):380-382.
[
|
| [15] |
徐丰, 牛继强, 林昊, 等. 利用等距同构建立多尺度空间实体相似性度量模型[J]. 武汉大学学报·信息科学版, 2019, 44(9):1399-1406.
[
|
| [16] |
|
| [17] |
徐广翔, 陈杰, 马素媛. 面状空间要素相似性度量方法研究[J]. 测绘科学, 2013, 38(3):31-33.
[
|
| [18] |
刘纯平, 陈宁强, 夏德深. 土地利用类型的分数维分析[J]. 遥感学报, 2003, 7(2):136-141.
[
|
| [19] |
黄宝群, 盛业华, 郭宁宁, 等. 同名边界点的面状居民地要素匹配[J]. 测绘科学, 2018, 43(2):108-113.
[
|
| [20] |
付仲良, 邵世维, 童春芽. 基于正切空间的多尺度面实体形状匹配[J]. 计算机工程, 2010, 36(17):216-217,220.
[
|
| [21] |
|
| [22] |
程绵绵, 孙群, 徐立, 等. 面轮廓线相似性和复杂性度量及在化简中的应用[J]. 测绘学报, 2019, 48(4):489-501.
[
|
| [23] |
郑悦, 程红, 孙文邦, 等. 遥感影像匹配技术研究[J]. 电子设计工程, 2011, 19(20):97-100,109.
[
|
| [24] |
|
| [25] |
|
| [26] |
牛宗标, 吴秀清, 李滔. 基于小面元方法的光学遥感图像快速匹配算法[J]. 计算机工程, 2006, 32(1):203-205.
[
|
| [27] |
张晓东, 李德仁, 龚健雅, 等. 一种基于面特征的遥感影像与GIS数据配准方法[J]. 遥感学报, 2006, 10(3):373-380.
[
|
| [28] |
陈巡, 钟凤媛, 刘雅鑫, 等. 基于ModelBuilder的图斑相似度分析[J]. 现代信息科技, 2021, 5(2):66-69,75.
[
|
| [29] |
郭庆胜, 丁虹. 基于栅格数据的面状目标空间方向相似性研究[J]. 武汉大学学报·信息科学版, 2004, 29(5):447-450,465.
[
|
| [30] |
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}