
基于SAR和AIS的角度最近邻数据关联方法
|
李可欣(1998—),女,湖北孝感人,硕士研究生,主要从事地理信息系统应用研究。E-mail: likexin_xxgcdx@163.com |
收稿日期: 2022-06-29
修回日期: 2022-08-29
网络出版日期: 2023-03-25
A method of Angular Nearest Neighbor Data Association based on SAR and AIS
Received date: 2022-06-29
Revised date: 2022-08-29
Online published: 2023-03-25
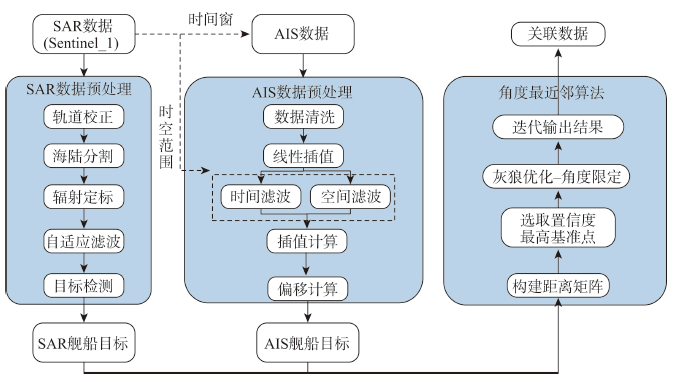
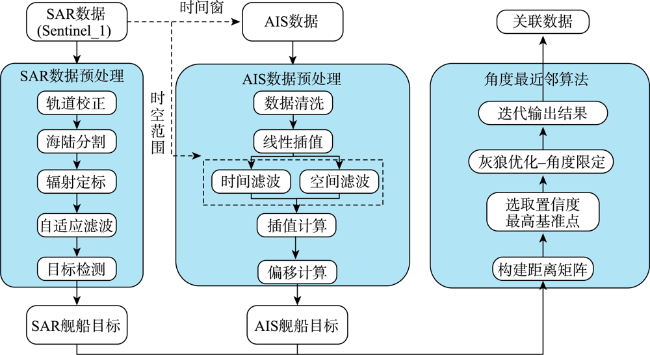
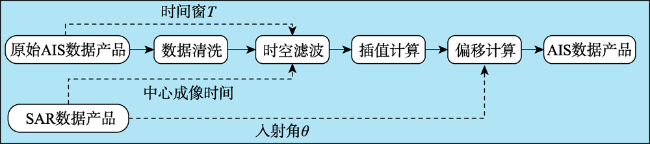
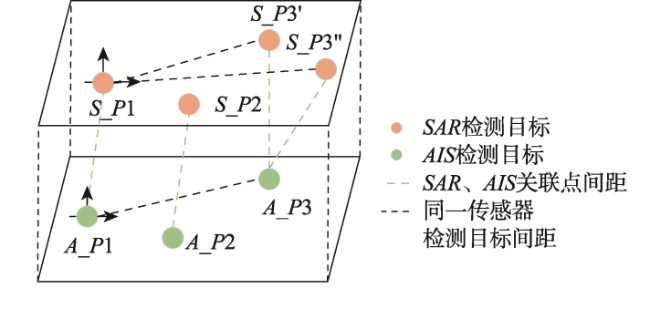
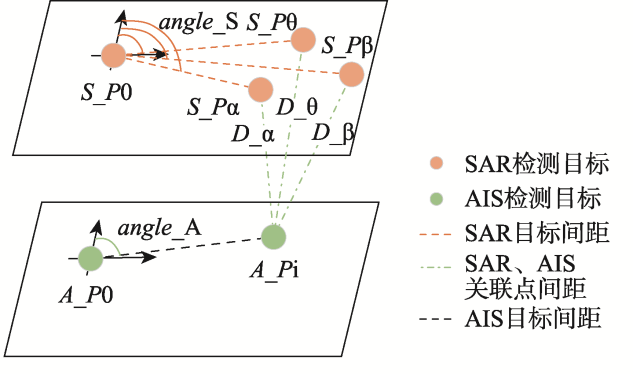
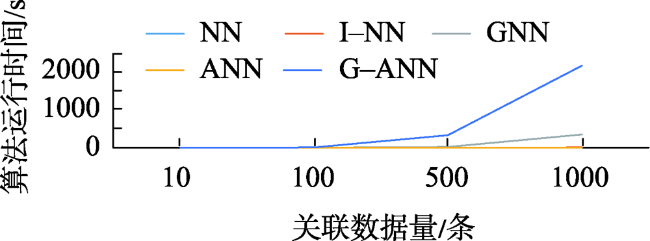
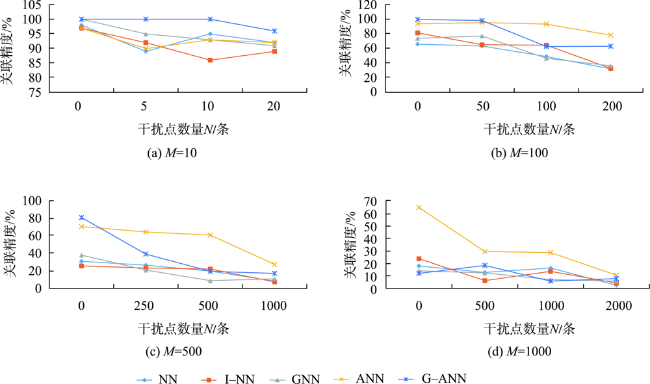
提升海上态势感知能力是构建智慧海洋的重要环节。针对目前海上目标研究单源传感器存在感知盲区,多源传感器数据关联易受杂波干扰、在密集区表现不佳等问题,本文基于合成孔径雷达(SAR)和船舶自动识别系统(AIS)数据,提出一种抗干扰性强的角度最近邻数据关联方法,充分利用SAR与AIS船舶目标的空间角度关系,提高船舶目标在密集区域点迹关联的准确性。首先,对AIS数据进行时空滤波,实现数据粗关联,构建关联分析的数据候选集;然后,从时空数据的空间关系角度出发,在灰狼优化和匈牙利算法的启发下,利用点迹对特征向量矩阵进行运算,实现对多源空间数据的优化关联;最后结合数据几何关系对结果进行置信度评估。本文选取5幅SAR影像与AIS数据进行实验,并基于SAR影像数据及船舶轨迹点分布密度设计仿真实验,结果表明,本文所提出的角度最近邻数据关联方法,在密集分布情况下,关联精度为传统NN、GNN算法的3.62和4.61倍,运行时间为1.69 s,相较于NN算法仅增长1.36 s,仅占GNN运行时间的0.49 %,在运行时间增长不大的情况下具有更强的抗干扰能力,在密集区域仍能取得较好的关联效果。
李可欣 , 郭健 , 王宇君 , 李宗明 , 缪坤 , 陈辉 . 基于SAR和AIS的角度最近邻数据关联方法[J]. 地球信息科学学报, 2023 , 25(1) : 131 -141 . DOI: 10.12082/dqxxkx.2023.220458
Improving maritime situation awareness is important for building an intelligent ocean. In order to solve the problems of perception blind area of single source sensor and poor performance of multi-source sensor data association in dense area, this paper proposes an angle nearest neighbor data association method with strong anti-interference based on Synthetic Aperture Radar (SAR) and Automatic Identification System (AIS) data. The spatial angle relationship between SAR and AIS is utilized to improve the accuracy of point trace correlation of ship targets in dense areas. Firstly, the spatiotemporal filtering is performed on AIS data to realize data coarse association, and a data candidate set for association analysis is constructed. Then, from the perspective of spatial relationship of spatiotemporal data, inspired by gray wolf optimization and Hungarian algorithm, the eigenvector matrix of point trace pair is operated to achieve the optimal association of multi-source spatial data. Finally, the confidence of the results is evaluated by combining the geometric relationship of the data. In this paper, five SAR images and AIS data are selected for experiments, and simulation experiments are designed based on SAR image data and the distribution density of ship trajectory points. The results show that, in the case of dense distribution, the correlation accuracy of the angular nearest neighbor data association method proposed in this paper is 3.62 and 4.61 times that of the traditional nearest neighbor algorithm and global nearest neighbor algorithm, respectively. The running time of our proposed method is 1.69 s, which is only 1.36 s longer than nearest neighbor algorithm and only accounts for 0.49 percent of global nearest neighbor algorithm’s running time. By comparison, our proposed method has stronger anti-interference ability and can achieve good correlation accuracy in dense areas with little increase in the running time.
表1 Sentinel-1 C-SAR仪器的关键参数Tab. 1 Key parameters of Sentinel-1 C-SAR instrument |
| 关键参数 | 范围 |
|---|---|
| 中心频率 | 5.405 GHz (对应波长~5.5465763cm) |
| 带宽 | 0~100 MHz |
| 极化方式 | HH+HV, VV+VI-1, VV, HH |
| 入射角 | 20°~ 46° |
| 视角 | 右视 |
表2 AIS数据源关键字段Tab. 2 AIS data source key fields |
| 信息类型 | 关键字段 |
|---|---|
| 静态信息 | MMSI、呼号、船名、船舶类型、船舶状态、船长、船宽 |
| 动态信息 | 记录时间、经度、纬度、速度、船艏向、航向 |
表3 船载AIS自主工作模式的消息发送标准Tab. 3 Message sending standards of autonomous working mode of AIS on board |
| 船舶航行状态 | 停泊 (抛锚) | 船速 0~14节 | 船速 0~14节 且航向改变 | 船速 14~23节 | 船速 14~23节 且航向改变 | 船速 >23节 | 船速>23节 且改变航向 |
|---|---|---|---|---|---|---|---|
| 报告时间间隔 | 3 min | 12 s | 4 s | 6 s | 2 s | 3 s | 2 s |
表4 AIS实际工作汇报时间Tab. 4 Actual reporting time of AIS work |
| 时间间隔/s | (0,60] | (60,180] | (180,360] | (360,600] | (600,1200] | (1200,+∞] |
|---|---|---|---|---|---|---|
| 轨迹条数/条 | 14 723 | 170 593 | 13 568 391 | 1 006 416 | 114 794 | 35 980 |
| 占比/% | 0.0985 | 1.1418 | 90.8146 | 6.7360 | 0.7683 | 0.2408 |
表5 研究区域数据产品信息Tab. 5 Study area data product information |
| SAR数据产品 | AIS数据产品 | |||||||
|---|---|---|---|---|---|---|---|---|
| 产品 位置 | 成像时间 | 经纬度范围 | 方位角/° | 检测舰船 /艘 | 原始数据/条 | 清洗数据/条 | 滤波后数据/条 | 舰船数/艘 |
| 区域1 | 2021-01-01 14:28:49 | LON (123.01°W— 126.43°W) LAT (48.09°N— 49.98°N) | -169.81 | 2284 | 19 944 119 (15 874) | 14 949 365 (8391) | 10 262 | 258 |
| 区域2 | 2021-01-01 14:30:16 | LON (112.87°W— 127.10°W) LAT (43.59°N— 45.49°N) | -169.98 | 31 | 2650 | 125 | ||
| 区域3 | 2021-01-01 00:02:09 | LON(88.19°W— 91.10°W) LAT(27.95°N— 29.87°N) | -10.36 | 1258 | 7019 | 1274 | ||
| 区域4 | 2021-01-01 23:02:44 | LON (72.66°W— 75.12°W) LAT (22.15°N— 24.08°N) | -10.47 | 311 | 1096 | 53 | ||
| 区域5 | 2021-01-01 22:18:44 | LON(64.46°W— 67.95°W) LAT(43.15°N— 44.65°N) | -10.04 | 695 | 56 | 5 | ||
表6 数据关联算法对比Tab. 6 Comparison of data matching algorithms |
| 区域 | 关联方法 | 运行时间/s | 全局距离/m | 关联点迹/对 |
|---|---|---|---|---|
| 1 | NN | 1.2977 | 3.768E+07 | 169 |
| GNN | 644.6883 | 3.766E+07 | 172 | |
| ANN | 1.6547 | 3.771E+07 | 177 | |
| 2 | NN | 0.0005 | 6.742E+05 | 2 |
| GNN | 0.0026 | 6.742E+05 | 2 | |
| ANN | 0.0041 | 7.034E+05 | 2 | |
| 3 | NN | 2.1926 | 1.224E+08 | 273 |
| GNN | 1192.0768 | 1.223E+08 | 278 | |
| ANN | 2.6385 | 1.224E+08 | 291 | |
| 4 | NN | 0.0592 | 1.575E+07 | 23 |
| GNN | 23.7882 | 1.574E+07 | 25 | |
| ANN | 0.1524 | 1.575E+07 | 33 | |
| 5 | NN | 0.0006 | 3.060E+08 | 6 |
| GNN | 0.0124 | 3.059E+08 | 7 | |
| ANN | 0.0216 | 3.069E+08 | 9 |
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
王琪, 廖志忠, 燕飞. 基于概率数据关联的雷达导引头抗速度拖引干扰算法[J]. 系统工程与电子技术, 2022, 44(2):448-454.
[
|
| [5] |
盛涛, 夏海宝, 杨永建, 等. 密集杂波环境下的简化JPDA多目标跟踪算法[J]. 信号处理, 2020, 36(8):1280-1287.
[
|
| [6] |
|
| [7] |
张湘毅, 丁兴如, 朱志明. Kuhn-Munkres算法在仓储排班中的应用研究[J]. 物流工程与管理, 2021, 43(6):162-166.
[
|
| [8] |
毛仁祥, 常建华, 张树益, 等. 基于3D-MobileNetv2的多目标实时跟踪框架[J]. 量子电子学报, 2022, 39(3):364-372.
[
|
| [9] |
|
| [10] |
|
| [11] |
李斐, 王振领, 张宇, 等. 基于Sentinel-1 SAR的埃默里冰架前端位置自动检测研究[J]. 武汉大学学报·信息科学版, 2018, 43(12):2012-2022.
[
|
| [12] |
张蒙蒙. 船只目标多传感器数据融合算法研究[D]. 呼和浩特: 内蒙古大学, 2021.
[
|
| [13] |
孟大寓. 基于数据融合的SAR图像中海上目标检测与跟踪技术研究[D]. 成都: 电子科技大学, 2022.
[
|
| [14] |
|
| [15] |
李浩然, 熊伟, 崔亚奇. 基于深度特征融合的SAR图像与AIS信息关联方法[J/OL]. 系统工程与电子技术, 2022(8):1-10.
[
|
| [16] |
|
| [17] |
范婉舒, 赖际舟, 吕品, 等. 基于改进DeepSORT的视觉/激光雷达目标跟踪与定位方法[J]. 导航定位与授时, 2022, 9(4):77-84.
[
|
| [18] |
李开言, 王亚刚, 张涛. 基于改进灰狼算法的边缘计算任务调度方法[J]. 信息与控制, 2022(6):1-8.
[
|
| [19] |
李竹根, 刘波峰, 张晓飞, 等. 基于改进灰狼算法与隐枚举法的配电网分区故障定位研究[J]. 电测与仪表, 2022(6):1-10.
[
|
| [20] |
刘玉杰, 韩维, 苏析超, 等. 基于改进灰狼优化算法的舰载机着舰调度[J]. 北京航空航天大学学报, 2022(6):1-15.
[
|
/
| 〈 |
|
〉 |


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}