
正二十面体六边形全球离散格网编码运算
|
赵 龙(1992— ),男,安徽宿州人,博士生,主要从事空间数据管理方面的研究。E-mail: zhaolong@aircas.ac.cn |
收稿日期: 2022-09-25
修回日期: 2022-11-11
网络出版日期: 2023-04-19
基金资助
中国科学院战略性先导科技专项(A类)(XDA19020103)
Code Operation Scheme for the Icosahedral Hexagonal Discrete Global Grid System
Received date: 2022-09-25
Revised date: 2022-11-11
Online published: 2023-04-19
Supported by
Strategic Priority Research Program of the Chinese Academy of Sciences, Grant(XDA19020103)
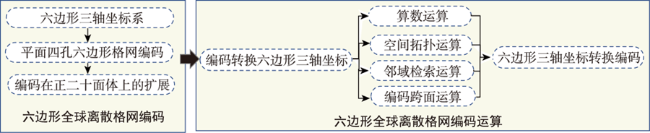
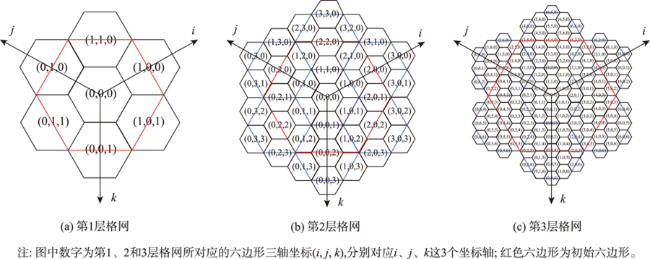
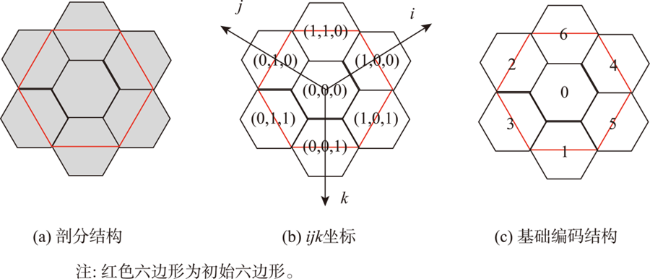
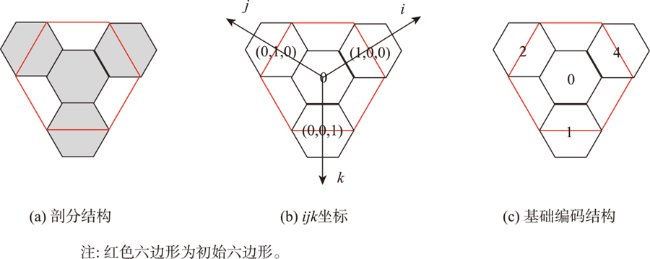
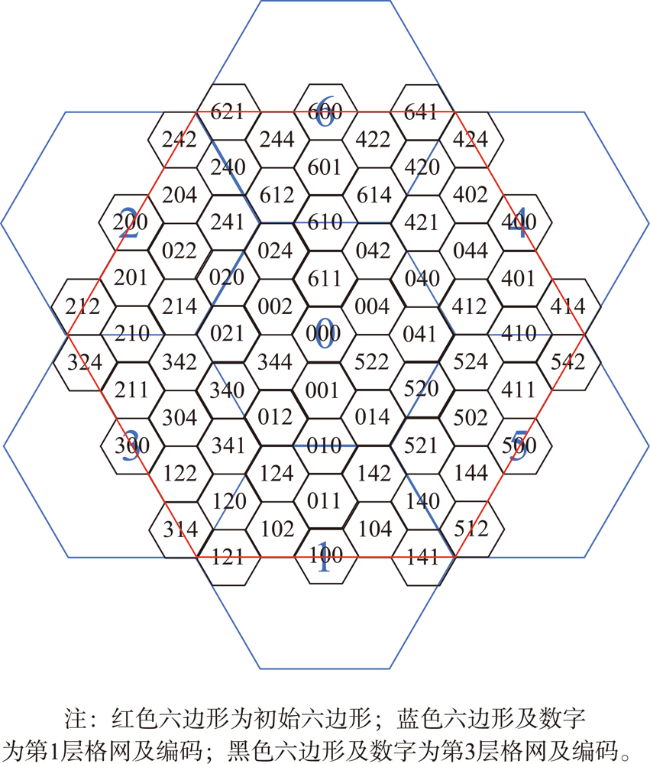
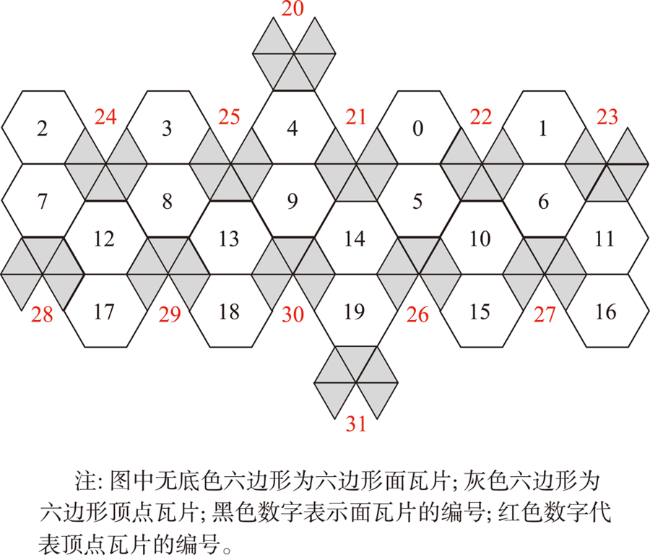
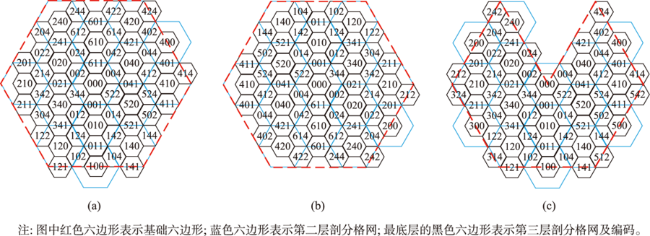
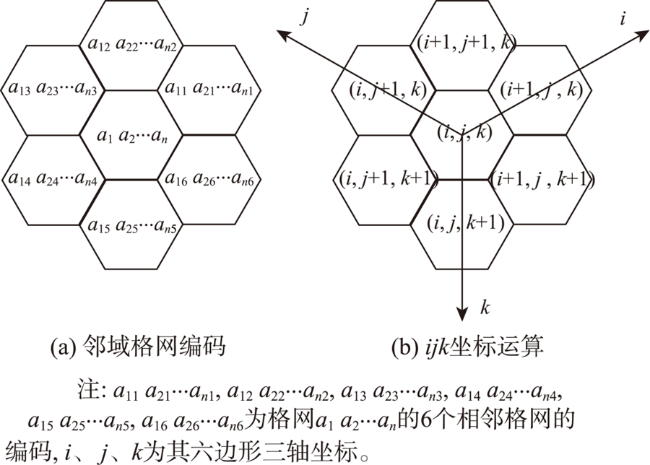
全球离散格网系统是指把地球表面按照一定规则离散分割成多分辨率层次结构的格网单元,广泛应用于海量多源空间数据的组织、管理和分析中。六边形全球离散格网具有优良的几何特性,非常适合于空间数据的处理,如何进一步提高六边形全球离散格网编码运算的效率仍是当前研究的重点。本文采用正二十面体施耐德投影四孔径六边形全球离散格网模型,基于六边形三轴坐标与编码的二进制数的对应关系构建四孔六边形的基础编码结构,将二十面体划分为32个基础六边形,并将之分为3种基础六边形剖分瓦片,在每个六边形剖分瓦片采用基础编码结构进行编码,建立了四孔六边形全球离散格网编码,同时设计了并实现了四孔六边形编码与六边形三轴坐标之间的快速转换,基于此构建了一种高效的四孔六边形全球离散格网编码运算方案,包括编码的算数运算、空间拓扑运算和邻域检索运算及跨面运算。与现有的六边形全球离散格网编码运算方案相比,本文的方案进一步提高了编码算数运算、空间拓扑运算和邻域检索运算的效率,编码加法运算是HLQT的2~3倍,邻域检索运算分别是HLQT的3~5倍和H3的2~3倍,且受格网编码层次的影响较小,编码的跨面邻域检索运算时间略高于面内的运算,可以为全球离散格网系统的研究应用提供支撑。

赵龙 , 李国庆 , 姚晓闯 , 马跃 . 正二十面体六边形全球离散格网编码运算[J]. 地球信息科学学报, 2023 , 25(2) : 239 -251 . DOI: 10.12082/dqxxkx.2023.220725
The discrete global grid system refers to the discrete partitioning of the earth's surface into grid cells with multi-resolution hierarchical structure according to certain rules, which is widely used in organization, management, and analysis of massive multi-source spatial data. The hexagonal global discrete grid has excellent geometric properties and is well suited for spatial data processing. However, how to further improve the efficiency of the hexagonal global discrete grid coding operation is still the focus of current research. In this paper, we adopt the model of icosahedral snyder equal-area projection aperture 4 hexagonal discrete global grid system and construct the base coding structure of aperture 4 hexagon based on the correspondence between the hexagonal triaxial coordinates and the coded binary numbers, consisting of 7 base digits in the first layer and 4 base digits int the other layer. We divide the icosahedron into 3 base hexagonal subdivision tiles according to the different subdivision structures and adopt the base coding structure for coding scheme in each hexagonal subdivision tile to establish the aperture 4 hexagonal discrete global grid coding scheme. Besides, this paper designs and implements a fast conversion between aperture 4 hexagonal code and hexagonal triaxial coordinates, based on which an efficient aperture 4 hexagonal discrete global grid encoding operation scheme is constructed, including arithmetic operation of encoding, spatial topology operation, and neighbourhood retrieval operation and cross-plane operation of encoding. Compared with the existing hexagonal discrete global grid coding scheme, the coding scheme proposed in this paper has fewer base code digits, is more concise, and facilitates faster conversion to the hexagonal triaxial coordinates of the grid. Compared with the existing coding operation scheme, the proposed scheme further improves the efficiency of coding arithmetic operation, spatial topology operation, and neighbourhood retrieval operation. The coding addition operation is 2~3 times more efficient than HLQT. The neighbourhood retrieval operation is 3~5 times and 2~3 times more efficient than HLQT and H3, respectively, and is less affected by the coding level of the grid coding. The proposed coding scheme in this paper has the same efficiency of additive operation and subtractive operation, and the efficiency of spatial topology operation is 2 times that of arithmetic operation. The coding cross-plane neighbourhood retrieval operation time is slightly longer than that of the in-plane operation, and the impact on the overall operation time is not significant. This study provides support for the research application of discrete global grid system.
表1 第1层格网编码与 坐标对应Tab. 1 Correspondence table between first code and coordinate |
| 与 轴夹角 | 无 | 0 | |||||
| 二进制 | 000 | 001 | 010 | 011 | 100 | 101 | 110 |
| 0 | 1 | 2 | 3 | 4 | 5 | 6 |
表2 第2层—第 层格网编码与 坐标对应Tab. 2 Correspondence table between th code and coordinate |
| 与 轴夹角 | 无 | 0 | ||
| 二进制 | 000 | 001 | 010 | 100 |
| 0 | 1 | 2 | 4 |
表3 第1层码元对应的 坐标Tab. 3 The coordinates associated with first symbol |
| 编码 | 0 | 1 | 2 | 3 | 4 | 5 | 6 |
|---|---|---|---|---|---|---|---|
表4 第2层—第n层码元对应的 坐标Tab. 4 The coordinates associated with th symbols |
| 编码 | 0 | 1 | 2 | 4 |
|---|---|---|---|---|
| 算法2:六边形三轴坐标转为全球离散格网编码 |
|---|
| 1. 输入:六边形三轴坐标 ; 2. 3. 4. 5. 6. 7. 8. 9. 10. 输出:格网编码 |
表5 第2层—第n层中 坐标对应的码元Tab. 5 The th symbol associated with the coordinate |
| 0 | 1 | 2 | 4 | 4 | 2 | 1 | |
| Ɵ | true | true | true | false | true | false | false |
表6 第1层中 坐标对应的码元Tab. 6 The first symbol associated with the coordinate |
| 0 | 1 | 2 | 3 | 4 | 5 | 6 |
| 算法3:编码算数运算 |
|---|
| 1. 输入:格网编码 和 2. 利用算法1,分别计算 和 所在格网 的六边形三轴坐标 和 3. 或者 4. 5. 6. 利用算法2,将六边形三轴坐标 转换为格网 编码 7. 输出:格网编码 |
| 算法4:编码空间拓扑运算 |
|---|
| 1. 输入:格网编码 和 2. 利用算法1,分别计算 和 所在格网的六边形三轴坐标 和 ; 3. 4. ; 5. 6. 7. 输出: 2个格网之间的最短连通距离 |
| 算法5:编码的邻域检索运算 |
|---|
| 1. 输入:格网编码 2. 利用算法1,计算 所在格网的六边形三轴 坐标 3. 分别计算格网的6个相邻格网的六边形三轴坐标 (5) 4. 5. 6. 7. 利用算法2,将六边形三轴坐标 转换为格网编码 8. 输出:相邻的6个格网编码,, ,,, |
| 算法6:编码的跨面邻域检索运算 |
|---|
| 1. 输入:格网编码 2. 利用算法1,计算 所在格网的六边形三轴坐标 3. 根据不同的瓦片类型及表2中格网的六边形三轴坐标所 属位置,计算在同一瓦片内的相邻格网的六边形三轴坐 标,并利用算法2将其转换为格网编码 4. 将 坐标转换为以相邻瓦片为中心的坐标系内的六 边形三轴坐标 ; 5. 计算 的相邻格网的六边形三轴坐标,并利用算 法2将其转换为格网编码 6. 输出:相邻的6个格网编码 , , , , , |
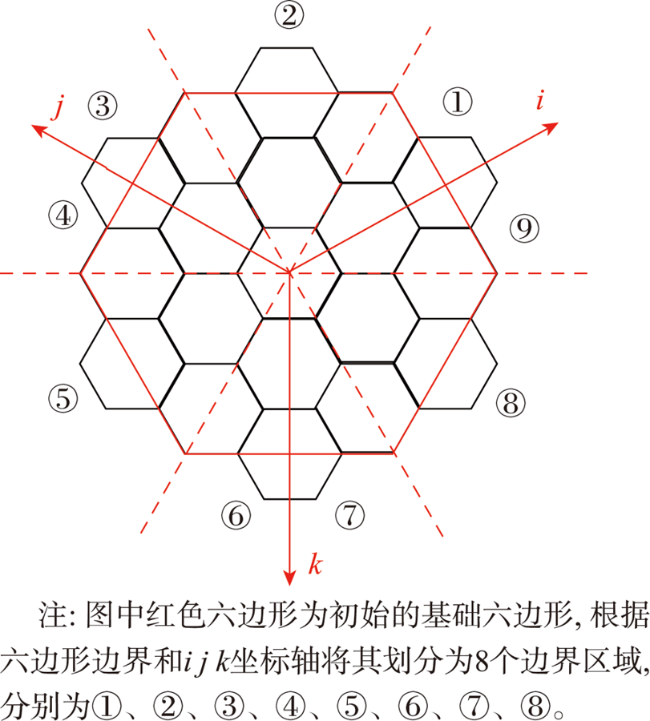
图10 跨面检索运算的六边形瓦片分区Fig. 10 Hexagonal tile partition map for cross-face retrieval operations |
表7 跨面格网单元所对应的方程Tab. 7 Table of equations corresponding to cross-face grid cells |
| 分区 | 临边 | 沿边 | 跨边 |
|---|---|---|---|
| ① | 2×i-j-2n+2=0 | 2×i-j-2n+1=0 | 2×i-j-2n=0 |
| ② | i+j+2-2n=0 | i+j+1-2n=0 | i+j+1-2n=0 |
| ③ | 2×j-i-2n+2=0 | 2×j-i-2n+1=0 | 2×j-i-2n=0 |
| ④ | 2×j-k-2n+2=0 | 2×j-k-2n+1=0 | 2×j-k-2n=0 |
| ⑤ | j+k-2n+2=0 | j+k-2n+1=0 | j+k-2n=0 |
| ⑥ | 2×k-j-2n+2=0 | 2×k-j-2n+1=0 | 2×k-j-2n=0 |
| ⑦ | 2×k-i-2n+2=0 | 2×k-i-2n+1=0 | 2×k-i-2n=0 |
| ⑧ | i+k-2n+2=0 | i+k-2n+1=0 | i+k-2n=0 |
| ⑨ | 2×i-k-2n+2=0 | 2×i-k-2n+1=0 | 2×i-k-2n=0 |
注:表中n表示全球离散格网系统第n层,i、j、k分别表示第n层格网所在六边形三轴坐标系中的坐标,ijk方程与图10中内容相对应。 |
表8 编码算数运算和空间拓扑运算的实验结果Tab. 8 Experimental results of arithmetic operations and spatial topological operations (ms) |
| 层次 | HLQT加法 运算 | 本文加法 运算 | 本文减法 运算 | 本文拓扑 运算 |
|---|---|---|---|---|
| 5 | 77 | 34 | 37 | 15 |
| 6 | 99 | 39 | 41 | 15 |
| 7 | 116 | 45 | 42 | 19 |
| 8 | 141 | 47 | 52 | 21 |
| 9 | 168 | 56 | 58 | 24 |
| 10 | 195 | 63 | 64 | 29 |
| 11 | 220 | 63 | 67 | 28 |
| 12 | 244 | 69 | 72 | 30 |
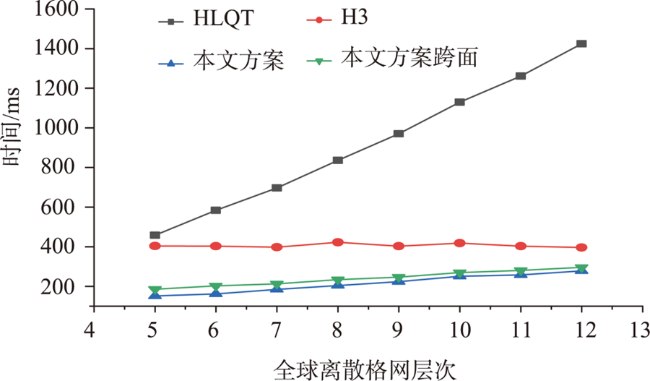
表9 编码邻域检索运算的实验结果Tab. 9 Experimental results of neighborhood retrieval operations (ms) |
| 层次 | HLQT | H3 | 本文方案 | 本文方案跨面 |
|---|---|---|---|---|
| 5 | 458 | 404 | 152 | 186 |
| 6 | 584 | 403 | 162 | 203 |
| 7 | 697 | 398 | 185 | 213 |
| 8 | 836 | 423 | 204 | 234 |
| 9 | 970 | 403 | 224 | 247 |
| 10 | 1130 | 418 | 251 | 270 |
| 11 | 1261 | 403 | 258 | 281 |
| 12 | 1424 | 396 | 278 | 296 |
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
李爽, 程承旗, 童晓冲, 等. 基于多级信息网格的海量遥感数据存储管理研究[J]. 测绘学报, 2016, 45(S1):106-114.
[
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
赵学胜, 贲进, 孙文彬, 等. 地球剖分格网研究进展综述[J]. 测绘学报, 2016, 45(S1):1-14.
[
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
王蕊, 贲进, 杜灵瑀, 等. 正二十面体四孔六边形格网系统编码运算[J]. 武汉大学学报·信息科学版, 2020, 45(1):89-96.
[
|
| [20] |
王蕊, 贲进, 杜灵瑀, 等. 平面四孔六边形格网系统编码运算[J]. 测绘学报, 2018, 47(7):1018-1025.
[
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
/
| 〈 |
|
〉 |



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}