
基于超赋值理论的模糊位置描述形式化与推理机制
|
张雪英(1970— ),女,四川眉山人,博士,教授,博士生导师,主要从事地理大数据挖掘、智慧城市和人文社会GIS等方面研究。E-mail: zhangsnowy@163.com |
收稿日期: 2023-01-17
修回日期: 2023-03-31
网络出版日期: 2023-06-02
基金资助
国家自然科学基金项目(41971337)
国家重点研发计划(2021YFB3900903)
江苏高校哲学社会科学研究一般项目(2022SJYB2128)
Formal Representation and Reasoning Mechanism for Vague Spatial Location Description based on Supervaluation
Received date: 2023-01-17
Revised date: 2023-03-31
Online published: 2023-06-02
Supported by
National Natural Science Foundation of China(41971337)
National Key Research and Development Program of China(2021YFB3900903)
Key Project of Philosophy and Social Science Research in Colleges and Universities in Jiangsu Province(2022SJYB2128)
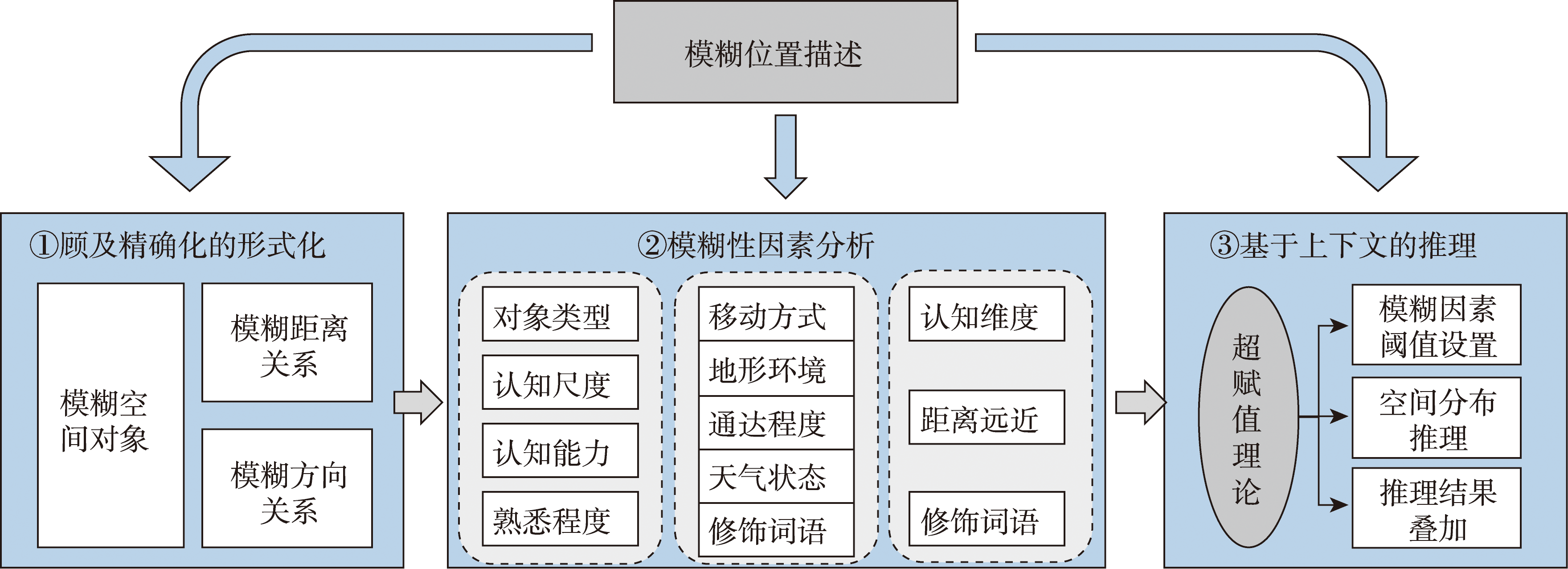
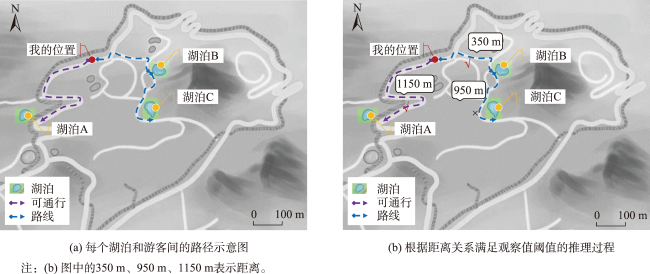
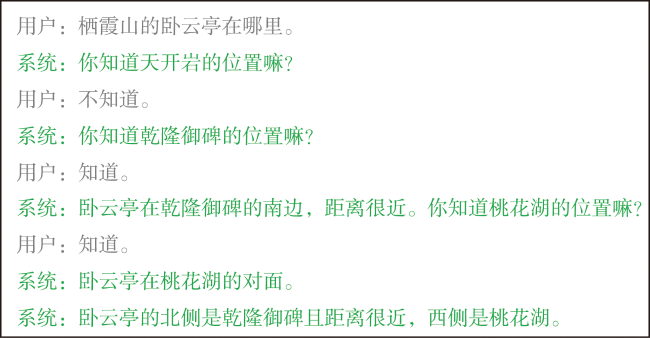
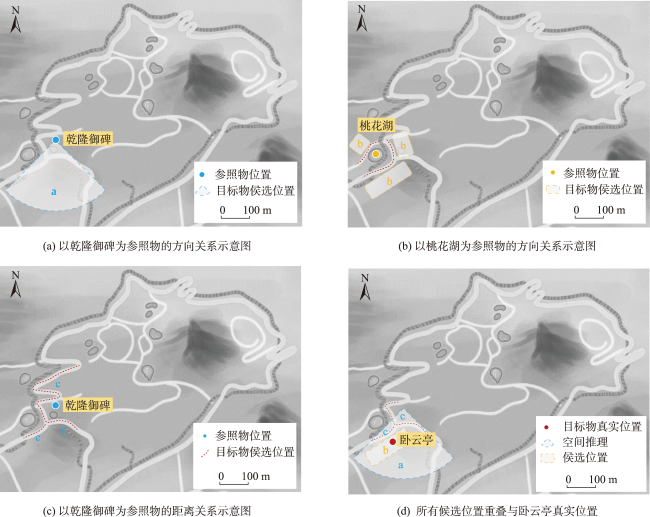
基于位置描述进行空间定位是大数据时代位置服务向智能化转型的关键。针对不同语境中位置描述模糊性差异显著而难以定位的问题,本文提出一种面向模糊位置描述的形式化方法与推理机制。首先,通过梳理人类空间认知规律,明确自然语言中位置描述时关注的要素类型,研究模糊位置描述的形式化表示。然后,基于超赋值理论,从空间对象、距离关系和方向关系3个方面构建模糊位置描述的推理机制。顾及位置描述的上下文语义,利用观察值阈值开展空间推理实现定位。最后,设计收集位置描述的问答系统对方法进行验证。结果表明,本文方法能够依据实际应用场景及时调整位置描述的形式化表示粒度,空间推理结果贴合直观认知。
张雪英 , 叶鹏 , 张慧峰 . 基于超赋值理论的模糊位置描述形式化与推理机制[J]. 地球信息科学学报, 2023 , 25(6) : 1135 -1147 . DOI: 10.12082/dqxxkx.2023.230025
Location description is the natural language expression of human spatial cognition. Since natural language is the primary and basic means of information transmission in human society, location description is an important medium for transmitting spatial location information in human communication. Spatial positioning based on spatial location description is the key to intelligent transformation of location-based services in the era of big data. To solve the problem that the vagueness of location description in different contexts is significantly different and results in difficulty in positioning, this paper proposes a representation method and reasoning mechanism for vague location description. Firstly, by combing the law of human spatial cognition, the types of elements concerned in the description of natural language are clarified. Based on the analysis of the sources of vagueness, a formal representation of vague location description is constructed. Different from the traditional spatial information modeling which focuses on spatial relationship, the formal representation proposed in this paper establishes the vagueness relation and influence among different information factors by the strategy of multi-factors representation. The formal representation also enhances the semantic analysis ability for the vagueness of location description. Secondly, based on supervaluation theory, the reasoning mechanism of vague location description is proposed from three aspects: spatial object, distance relation, and direction relation. Considering the context semantics of spatial location description, the threshold of observation value is used to carry out spatial reasoning. By being super-valued to different contexts, the reasoning results in different situations are obtained. The aim of the reasoning mechanism is to establish the mapping relationship between vague location description and real spatial location. Thirdly, a Question-Answering (Q&A) system is designed to collect contexts of location description, and a case study on the method is conducted. In the case study, a group of users' viewpoints from Q&A on spatial cognition are transformed into the spatial scope in the real world. These spatial scopes can establish the relationship between qualitative spatial concepts and quantitative spatial data, so as to realize the representation of vague location description in GIS. The results show that the proposed method in this paper can adjust the granularity of formal representation of location description in time according to actual application scenarios, and the spatial reasoning results fit intuitive cognition. In the future, knowledge graphs will be introduced to further improve the semantic reasoning ability and positioning accuracy for vague location description.
表1 基于空间断言的空间推理Tab. 1 Semantic analysis based on supervaluation of single spatial assertion |
| 推理因素 | 是否断言 | 上下文语义 | 观察值 | 阈值范围 |
|---|---|---|---|---|
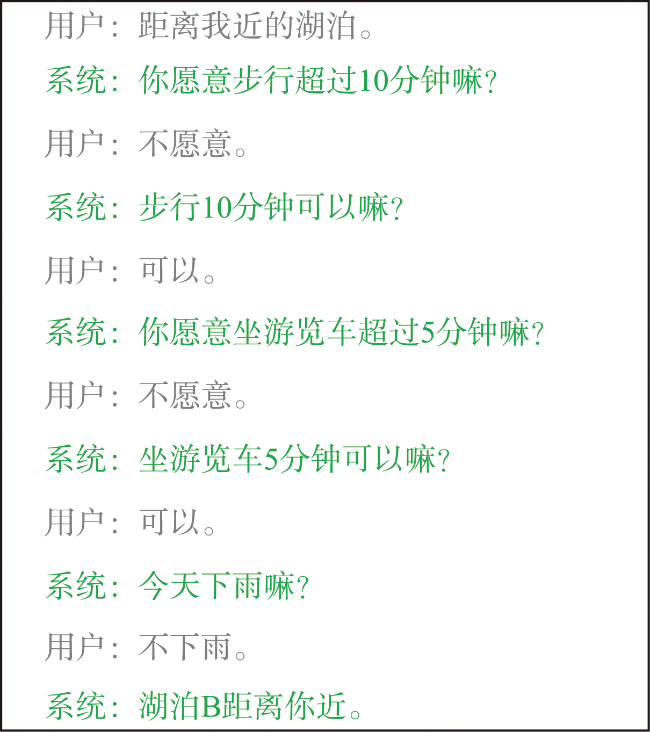
| 移动方式 | 是 | 步行,≤10 min 乘游览车,≤5 min | 500 m、2 250 m | ① 500 m×1.0×1.0=500 m,阈值范围是[0, 500 m] ② 500 m×0.9×1.0=450 m,阈值范围是[0, 450 m] ③ 2 250 m×1.0×1.0=2 250 m,阈值范围是[0, 2 250 m] |
| 地形环境 | 否 | - | - | |
| 通达程度 | 是 | 主干道 人行道 | ×1.0 ×0.9(仅步行) | |
| 天气状态 | 是 | 晴朗 | ×1.0 | |
| 修饰词语 | 否 | - | - |
表2 基于复合空间断言的空间推理Tab. 2 Semantic analysis based on supervaluation of compound spatial assertions. |
| 参照物及空间关系 | 推理因素 | 是否断言? | 上下文语义 | 观察值 | 阈值范围 |
|---|---|---|---|---|---|
| 乾隆御碑 方向关系 | 认知维度 | 是 | 南,4维 | [225°, 315°) | [225°, 315°) |
| 距离远近 | 否 | - | - | ||
| 修饰词语 | 否 | - | - | ||
| 桃花湖 方向关系 | 认知维度 | 是 | 2维 | 空间一分为二 | 1 |
| 距离远近 | 否 | - | - | ||
| 修饰词语 | 是 | 对面 | 1(说明:0为同侧,1为另一侧) | ||
| 乾隆御碑 距离关系 | 移动方式 | 是 | 步行,≤10 min | 500 m | [0 m, 500 m] |
| 地形环境 | 否 | - | - | ||
| 通达程度 | 是 | 有道路连通 | ×1.0 | ||
| 天气状态 | 是 | 晴天 | ×1.0 | ||
| 修饰词语 | 否 | - | - |
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
曹菡. 空间关系推理的知识表示与推理机制研究[D]. 武汉: 武汉大学, 2002.
[
|
| [6] |
余建伟, 李清泉. 位置感知计算中定位信息的自然语言描述[J]. 地理与地理信息科学, 2009, 25(1):10-13,21.
[
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
张雪英, 闾国年. 自然语言空间关系及其在GIS中的应用研究[J]. 地球信息科学, 2007, 9(6):77-81.
[
|
| [11] |
郑玥, 龙毅, 明小娜, 等. 多种空间关系组合的地理位置自然语言描述方法[J]. 地球信息科学学报, 2011, 13(4):465-471.
[
|
| [12] |
杜清运, 任福. 空间信息的自然语言表达模型[J]. 武汉大学学报·信息科学版, 2014, 39(6):682-688.
[
|
| [13] |
陈晓丹. 面向自然语言的空间位置信息形式化表达方法[D]. 南京: 南京师范大学, 2015.
[
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
许珺. 关于线状地理特征空间关系的自然语言描述的形式化表达[J]. 遥感学报, 2007, 11(2):152-158.
[
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
熊明. 超赋值与悖论度[J]. 湖南科技大学学报(社会科学版), 2017, 20(1):25-30.
[
|
| [23] |
陈明益. 含混性与超赋值论[J]. 哲学动态, 2014(8):104-109.
[
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
|
| [29] |
|
| [30] |
刘瑜, 袁一泓, 张毅. 基于认知的模糊地理要素建模——以中关村为例[J]. 遥感学报, 2008, 12(2):370-377.
[
|
| [31] |
王彦坤, 樊红, 王伟玺, 等. 地标空间方向的位置描述定位模型[J]. 测绘科学, 2020, 45(9):18-24.
[
|
| [32] |
张毅, 邬阳, 高勇, 等. 基于空间陈述的定位及不确定性研究[J]. 地球信息科学学报, 2013, 15(1):38-45.
[
|
| [33] |
周森. 基于模糊语义的动画场景生成[D]. 长沙: 湖南大学, 2013.
[
|
| [34] |
王晓明, 刘瑜, 张晶. 地理空间认知综述[J]. 地理与地理信息科学, 2005, 21(6):1-10.
[
|
| [35] |
|
| [36] |
金鑫, 耿海燕, 高勇, 等. 空间方位关系在不同认知场境下的模糊性探讨[J]. 北京大学学报(自然科学版), 2009, 45(6):1025-1032.
[
|
/
| 〈 |
|
〉 |

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}