
融合图自编码器与GRU的城市盗窃犯罪时空分布预测模型
|
赵 丹(1997— ),女,陕西宝鸡人,硕士生,研究方向为犯罪预测与时空数据挖掘。E-mail:1336808245@qq.com |
收稿日期: 2022-08-12
修回日期: 2022-11-29
网络出版日期: 2023-06-30
基金资助
国家自然科学基金项目(42061060)
兰州交通大学优秀平台支持(201806)
兰州交通大学天佑创新团队(TY202001)
Spatio-temporal Distribution Prediction Model of Urban Theft by Fusing Graph Autoencoder and GRU
Received date: 2022-08-12
Revised date: 2022-11-29
Online published: 2023-06-30
Supported by
National Natural Science Foundation of China(42061060)
LZJTU EP(201806)
Tianyou innovation team of Lanzhou Jiaotong University(TY202001)
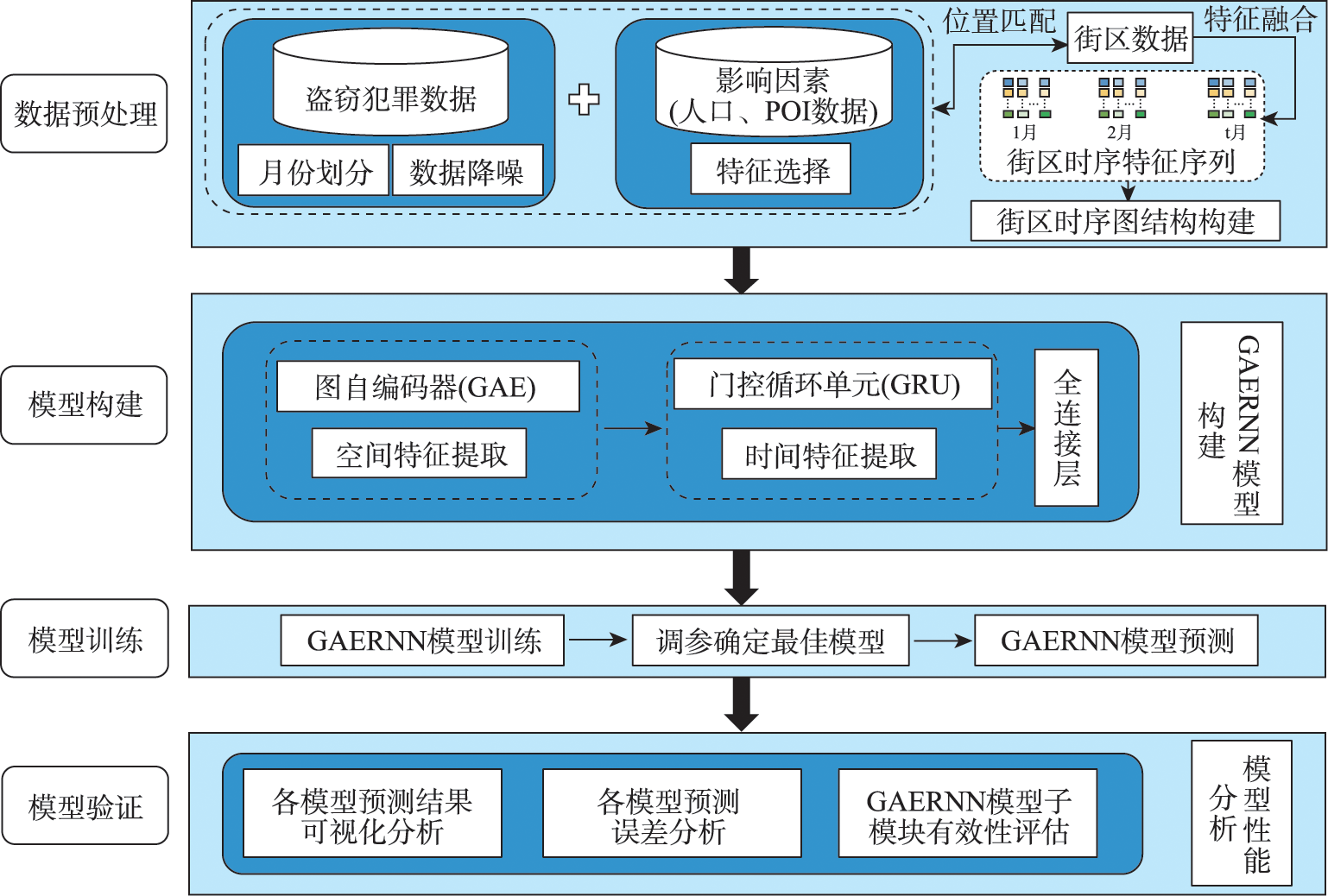
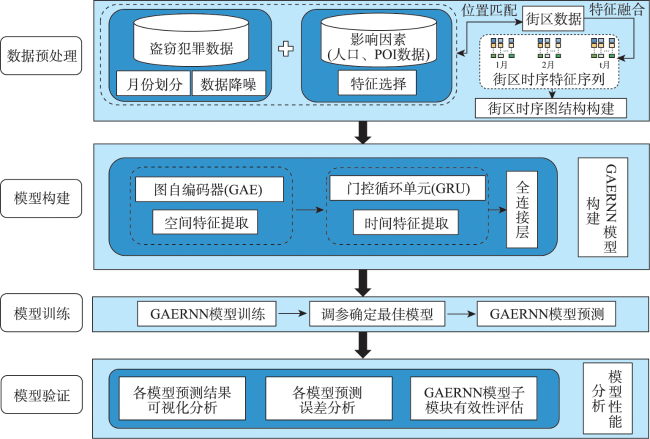
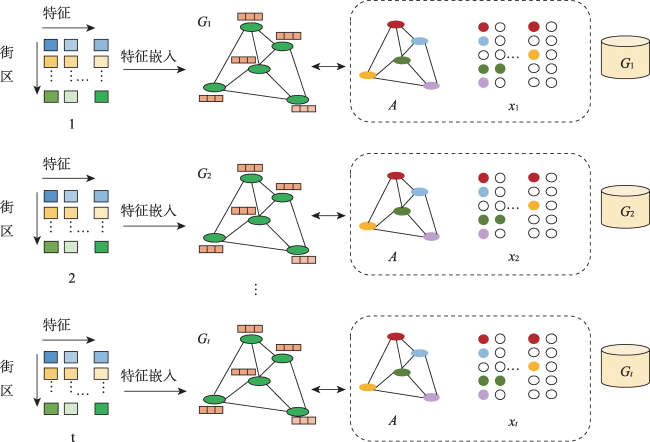
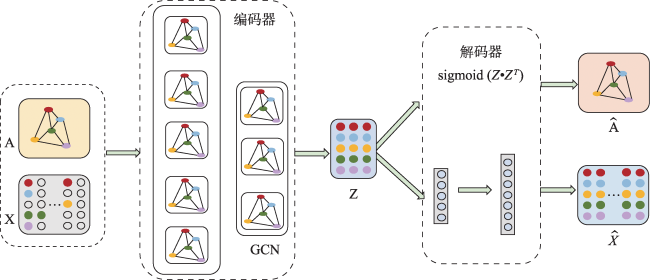
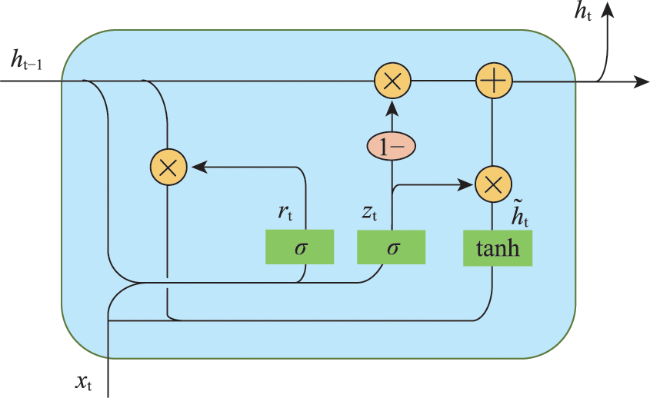
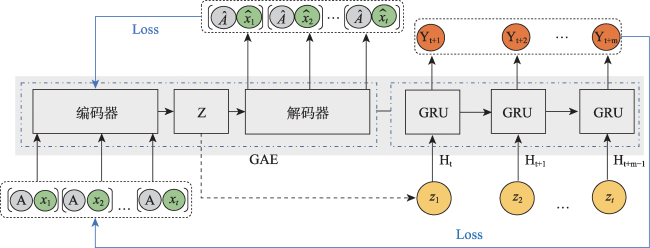
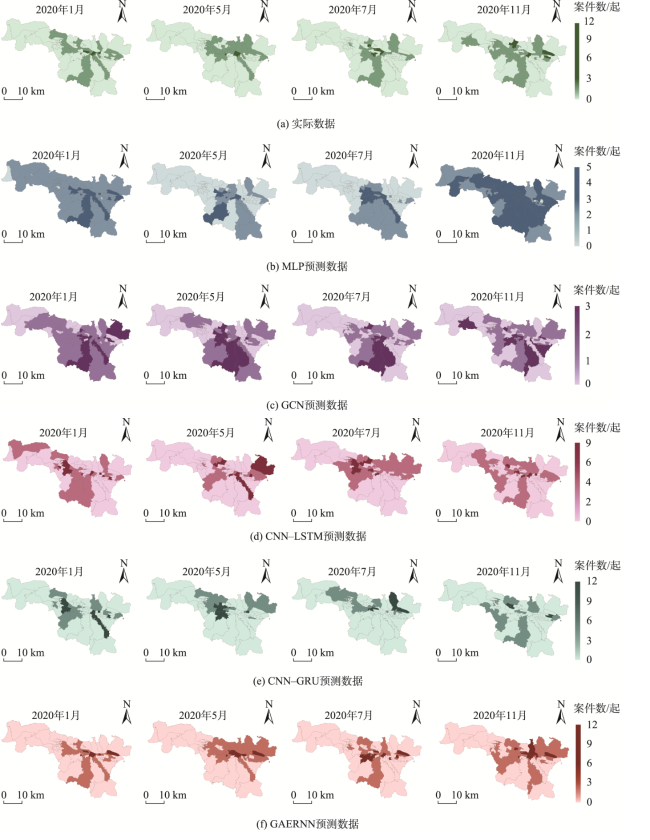
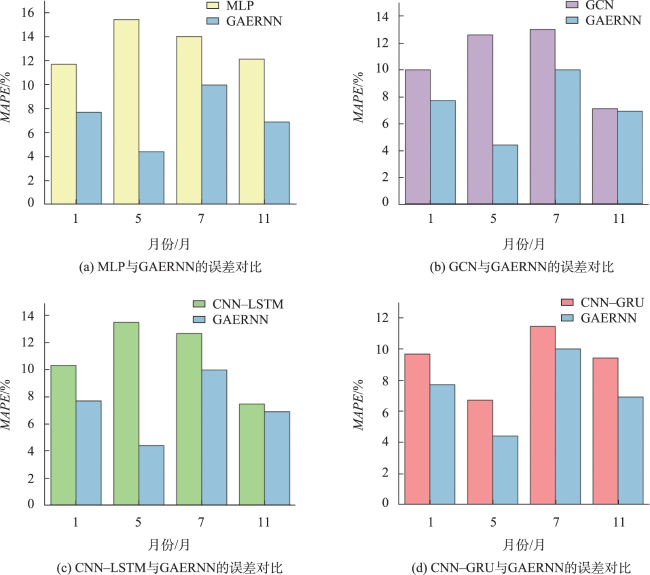
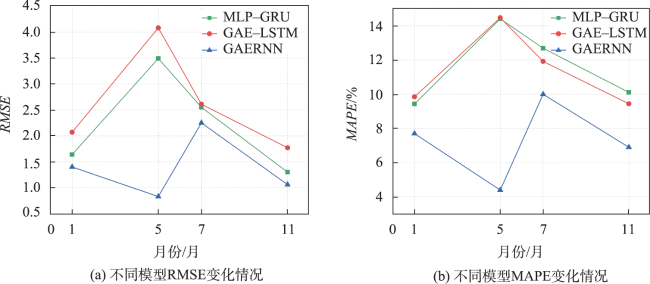
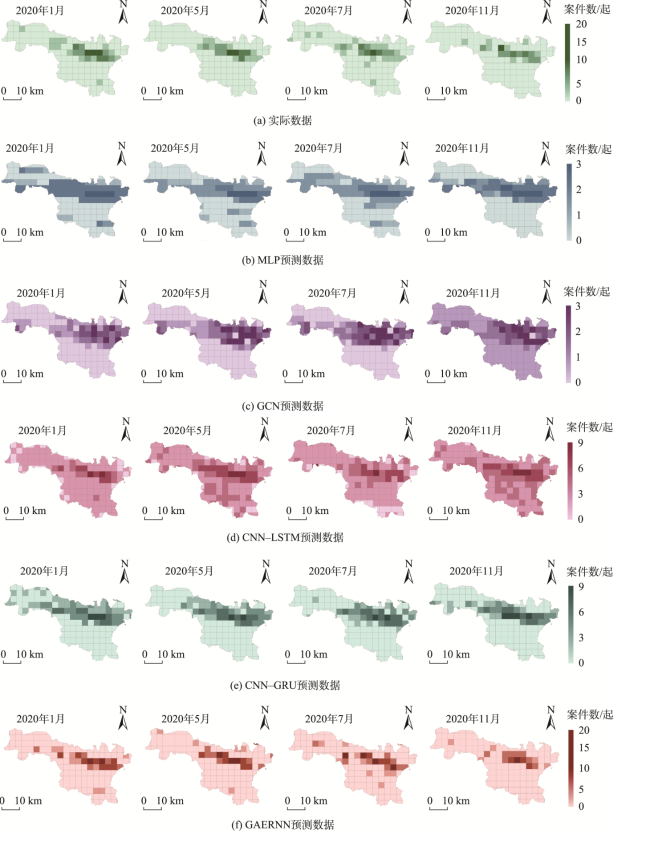
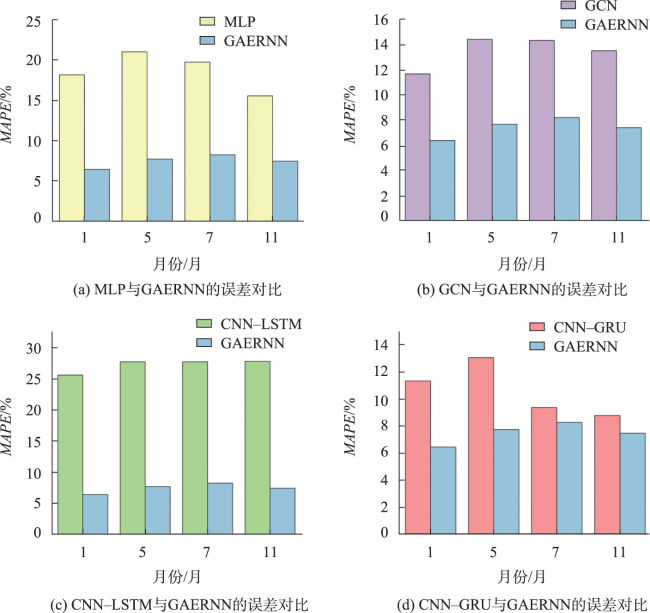
犯罪预测是进行犯罪预防的前提,高效准确的犯罪预测对于提高城市管理效率、保障公共安全都具有重要的意义。当前,关于犯罪预测的已有研究大多采用单一的机器学习方法或深度学习模型,忽略了犯罪的时空依赖关系,往往难以获得准确的预测结果。本文提出一个基于深度学习技术的犯罪时空预测模型—GAERNN:① 利用GAE模型捕获犯罪案件的空间分布特征;② 将带有空间依赖关系的特征经序列化处理后作为GRU模型的输入,进一步提取犯罪序列的时间特征;③ 经全连接层处理获得犯罪时空预测结果,并选取MLP、GCN等基准模型进行对比实验,结合RMSE、MSE等多个指标对模型预测结果进行评估。实验结果表明:对于各模型预测结果可视化分析, GAERNN模型预测的可视化结果与实际数据分布最相符合;在各模型误差分析方面,相比预测性能较差的MLP, GAERNN模型各月份的RMSE分别降低了1.02、3.58、1.29以及0.45;在子模块有效性评估方面,相比其变体模型GAE-LSTM, GAERNN模型在各月份的MAPE分别降低了2.15%、10.07%、1.92%以及2.54%,说明GAERNN模型能显著提高盗窃犯罪时空预测精度,可用于城市盗窃犯罪的积极预防和有效治理。
赵丹 , 杜萍 , 刘涛 , 令振飞 . 融合图自编码器与GRU的城市盗窃犯罪时空分布预测模型[J]. 地球信息科学学报, 2023 , 25(7) : 1448 -1463 . DOI: 10.12082/dqxxkx.2023.220584
Crime prediction is a prerequisite for crime prevention. Forecasting crime efficiently and accurately is of great significance for improving urban management and public safety. At present, it is difficult for most of the existing studies to obtain accurate crime prediction, because they usually utilize a single machine learning or deep learning model, ignoring the spatiotemporal dependence of the crime. In this paper, we propose a spatiotemporal prediction model GAERNN based on deep learning techniques. Firstly, the GAE model is used to capture the spatial distribution characteristics of crime cases. Secondly, the features with spatial dependencies are input into the GRU model after serialization to further extract the temporal features of crime sequences. Then, the spatial and temporal prediction results of theft crime are obtained by the fully connected layer processing. Finally, we select MLP and GCN to carry out contrastive experiments by using several indicators, such as RMSE and MSE, to verify the performance of our model. The results show that our model is significantly superior to other benchmark models in spatiotemporal prediction, and it can be used to prevent and control theft crime effectively.
表1 实验数据Tab. 1 Experimental data |
| 数据名称 | 采集 时间/年 | 数据类型 | 数据来源 |
|---|---|---|---|
| 人口数据 | 2022 | 文本 | 兰州市第七次人口普查公报 |
| POI数据 | 2021 | 地图 | 高德地图 |
| 犯罪数据 | 2016—2020 | 文本 | 中国裁判文书网 |
表2 POI分类Tab. 2 POI classification |
| 一级类 | 二级类 | 三级类 |
|---|---|---|
| 住宅服务 | 房产建筑 | 住宅小区、写字楼 |
| 商业服务 | 购物服务 | 商场、超市、商店 |
| 娱乐服务 | KTV、酒吧、网吧、会所 | |
| 餐饮服务 | 饭馆、快餐店、农家乐 |
表3 各模型不同月份的预测误差Tab. 3 Error of each model on different months |
| 方法 | 1月 | 5月 | 7月 | 11月 | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| RMSE | MSE | MAPE/% | RMSE | MSE | MAPE/% | RMSE | MSE | MAPE/% | RMSE | MSE | MAPE/% | ||||
| MLP | 2.42 | 1.50 | 11.75 | 4.41 | 2.49 | 15.50 | 3.54 | 2.13 | 14.08 | 1.51 | 1.28 | 12.18 | |||
| GCN | 2.16 | 1.36 | 10.00 | 1.93 | 1.32 | 12.60 | 3.19 | 1.92 | 13.00 | 1.38 | 0.86 | 7.10 | |||
| CNN-LSTM | 2.11 | 1.37 | 10.34 | 2.52 | 1.79 | 13.52 | 3.23 | 1.89 | 12.70 | 1.48 | 0.89 | 7.47 | |||
| CNN-GRU | 1.52 | 1.12 | 9.67 | 1.42 | 0.83 | 6.70 | 2.45 | 1.52 | 11.44 | 1.36 | 1.02 | 9.41 | |||
| GAERNN | 1.40 | 0.95 | 7.70 | 0.83 | 0.50 | 4.40 | 2.25 | 1.54 | 10.00 | 1.06 | 0.78 | 6.90 | |||
表4 GAERNN及其变体模型误差统计Tab. 4 Error statistics for GAERNN and its variant models |
| 方法 | 1月 | 5月 | 7月 | 11月 | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| RMSE | MSE | MAPE/% | RMSE | MSE | MAPE/% | RMSE | MSE | MAPE/% | RMSE | MSE | MAPE/% | ||||
| MLP-GRU | 1.64 | 1.15 | 9.43 | 3.49 | 2.13 | 14.41 | 2.55 | 2.13 | 12.69 | 1.30 | 1.08 | 10.11 | |||
| GAE-LSTM | 2.07 | 1.27 | 9.85 | 4.08 | 2.30 | 14.47 | 2.61 | 1.67 | 11.92 | 1.77 | 1.07 | 9.44 | |||
| GAERNN | 1.40 | 0.95 | 7.70 | 0.83 | 0.50 | 4.40 | 2.25 | 1.54 | 10.00 | 1.06 | 0.78 | 6.90 | |||
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
徐冲, 柳林, 周素红. 基于临近相似性考虑的犯罪热点密度图预测准确性比较——以DP半岛街头抢劫犯罪为例[J]. 地理科学, 2016, 36(1):55-62.
[
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
张宁, 王大为. 基于风险地形建模的毒品犯罪风险评估和警务预测[J]. 地理科学进展, 2018, 37(8):1131-1139.
[
|
| [16] |
|
| [17] |
柳林, 纪佳楷, 宋广文, 等. 基于犯罪空间分异和建成环境的公共场所侵财犯罪热点预测[J]. 地球信息科学学报, 2019, 21(11):1655-1668.
[
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
韩昕格. LSTM与ST-GCN融合的城市盗窃犯罪预测方法[D]. 北京: 中国人民公安大学, 2021.
[
|
| [28] |
|
| [29] |
柳林, 刘文娟, 廖薇薇, 等. 基于随机森林和时空核密度方法的不同周期犯罪热点预测对比[J]. 地理科学进展, 2018, 37(6):761-771.
[
|
| [30] |
|
| [31] |
|
| [32] |
柳林, 梁斯毅, 宋广文. 基于潜在受害者动态时空分布的街面接触型犯罪研究[J]. 地球信息科学学报, 2020, 22(4):887-897.
[
|
| [33] |
|
| [34] |
兰州市统计局兰州市第七次全国人口普查领导小组办公室. 兰州市第七次全国人口普查公报[1]——2021年5月27日[N]. 兰州日报, 2021-05-28(2).
[ Lanzhou City Bureau of Statistics Lanzhou City Seventh National Census Leading Group Office. Lanzhou City Seventh National Census Bulletin[1]——27 May 2021[N]. Lanzhou Daily, 2021-05-28( 2).] DOI:10.28556/n.cnki.nlzrb.2021.001834
|
| [35] |
李萍. 城市复杂路网瓶颈路段路径优化问题研究[D]. 兰州: 兰州交通大学, 2019.
[
|
| [36] |
姜昀呈, 孙立坚, 王涛涛, 等. 兰州市中心城区犯罪分布与城市环境的关系[J]. 测绘科学, 2021, 46(5):167-174.
[
|
| [37] |
祝石厚. 基于卡尔曼滤波算法的动态谐波状态估计技术研究[D]. 重庆: 重庆大学, 2008.
[
|
| [38] |
李芳, 戚振东. 超声波流量测量时差改进卡尔曼滤波[J]. 科技信息, 2011(5):484-485.
[
|
| [39] |
|
| [40] |
马佳欣. 基于深度学习的人脸正面图像合成方法的研究与实现[D]. 北京: 北京邮电大学, 2019.
[
|
| [41] |
|
| [42] |
许秀锋, 蒲家坤, 周爱国, 等. 基于门控循环单元的车载控制器局域网络总线入侵检测方法[J]. 科学技术与工程, 2021, 21(16):6786-6793.
[
|
| [43] |
陈修凯, 陆志华, 周宇. 基于卷积编解码器和门控循环单元的语音分离算法[J]. 计算机应用, 2020, 40(7):2137-2141.
[
|
| [44] |
周满国, 黄艳国, 段锦锋. 基于GRU-RF模型的太阳辐照度短时预测[J]. 太阳能学报, 2022, 43(7):166-173.
[
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}