
无人机遥感和GWR结合的水华短时预测方法
|
张寒博(1996— ),男,河南开封人,硕士,主要研究方向为水环境遥感。E-mail: 2120191109@glut.edu.cn |
收稿日期: 2022-12-27
修回日期: 2023-03-20
网络出版日期: 2023-07-14
基金资助
国家重点研发计划项目(2022YFF0711602)
国家自然科学基金项目(41976190)
国家自然科学基金项目(41976189)
广东省科学院发展专项资金项目(2022GDASZH-2022010202)
广东省科学院发展专项资金项目(2022GDASZH-2022020402-01)
广东省科技计划项目(2021B1212100006)
A Short-term Prediction Method of Water Bloom based on UAV Remote Sensing and GWR
Received date: 2022-12-27
Revised date: 2023-03-20
Online published: 2023-07-14
Supported by
National Key R&D Program of China(2022YFF0711602)
National Natural Science Foundation of China(41976190)
National Natural Science Foundation of China(41976189)
The GDAS' Project of Science and Technology Development(2022GDASZH-2022010202)
The GDAS' Project of Science and Technology Development(2022GDASZH-2022020402-01)
The Science and Technology Program of Guangdong(2021B1212100006)
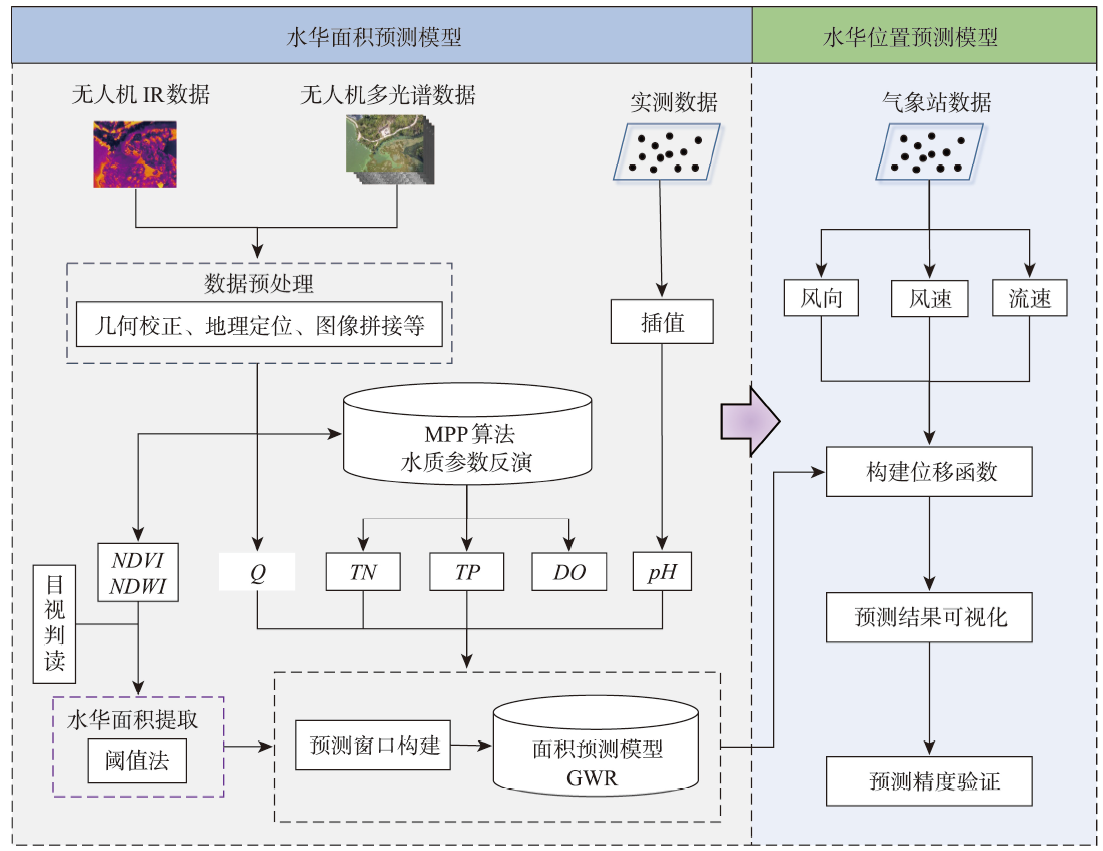
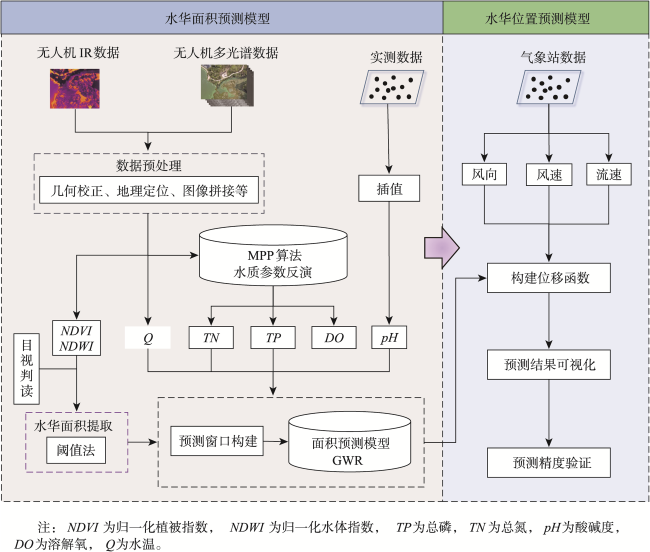
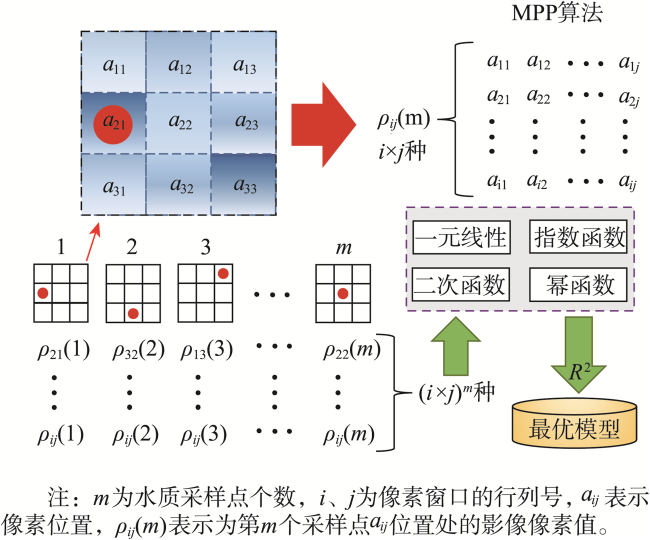
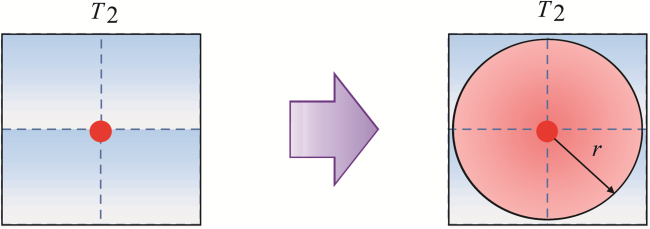
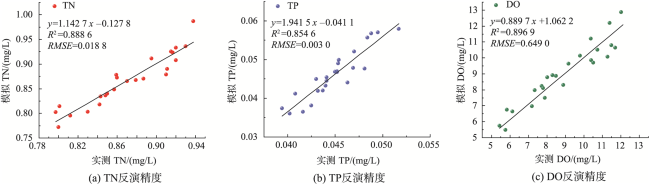
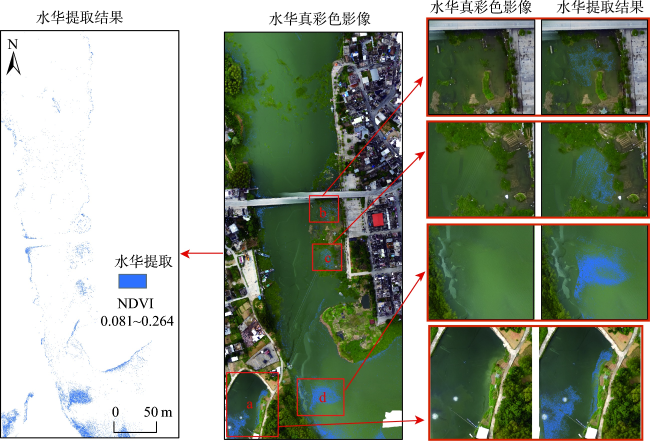
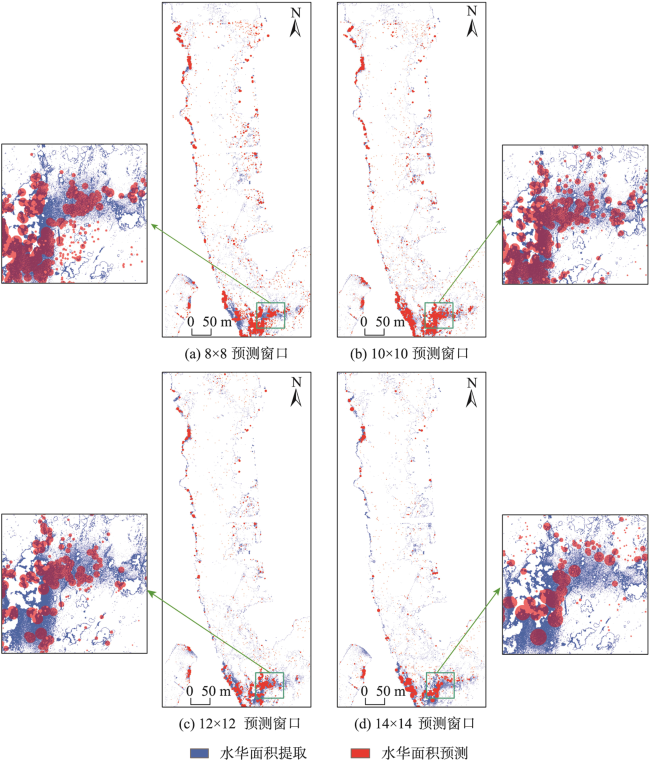
目前水华已成为国内外一个重要的环境问题,单一的光学遥感方法难以实现精细化的水华预测。针对上述问题,本文以无人机多光谱影像、水质、水温及气象数据为数据源,首先通过像素匹配法(Matching Pixel-by-Pixel,MPP)反演水质参数及归一化植被指数(Normalized Difference Vegetation Index, NDVI)阈值法提取水华信息,然后基于地理加权回归(Geographically Weighted Regression, GWR)建立涵盖面积信息和位置信息的水华短时预测模型,并探讨了预测窗口尺寸对预测结果的影响。结果表明:① 本文方法可以实现精细化的水华短时预测,在应用中对水华面积预测精度达到96.19%,在水华空间分布的预测上对水华和非水华的总体分类精度均大于0.97,生产者精度、Kappa系数均大于0.5; ② MPP反演的总氮、总磷和溶解氧浓度与实测数据都有着较高的相关性,其决定系数R2分别达到0.89、0.85、0.89; ③ 不同尺寸的预测窗口直接影响预测结果精度,相比8×8、12×12、14×14,选用10×10预测窗口得到的总体分类精度、生产者精度、Kappa系数最高,分别为0.98、0.77、0.77。该模型可为短时水华预测提供借鉴,有利于水华监测、预测工作的进一步深入与完善。
张寒博 , 李彤 , 李晓芳 , 邓滢 , 邓应彬 , 荆文龙 , 胡义强 , 李勇 , 杨骥 . 无人机遥感和GWR结合的水华短时预测方法[J]. 地球信息科学学报, 2023 , 25(8) : 1682 -1698 . DOI: 10.12082/dqxxkx.2023.221010
In recent years, the conflict between rapid growth of economy and protection of water resources has become increasingly prominent. Water bloom has also become an important environmental issue, both domestically and internationally. Efficient use of remote sensing to predict water bloom outbreaks is of great significance to promote the management and protection of the lake and reservoir water environment. Using multispectral images of Unmanned Aerial Vehicle and measured water quality parameters as data sources, the water quality parameters were inversed by the Matching Pixel-by-pixel (MPP) algorithm, and the water bloom information was extracted through the Normalized Difference Vegetation Index (NDVI) threshold method. Then, a short-term prediction model of water bloom based on geographical weighted regression was proposed. The characteristic of this model was that it can accurately estimate the area and spatial location of the water bloom within a short period. We also discussed the influence of window size on the prediction results. The results show that: (1) based on the proposed model, the prediction accuracy of bloom area reached 96.19%. For the spatial distribution of water bloom, the overall classification accuracy of water bloom and non-water bloom pixels was both greater than 0.969, and the producer accuracy and Kappa coefficient were both higher than 0.5; (2) the total nitrogen, total phosphorus, and dissolved oxygen concentrations inverted using the MPP algorithm showed high correlation with the measurements (R2 was 0.888 6, 0.854 6, and 0.896 9, respectively). The water bloom information extracted by NDVI threshold method had a high consistency with the true color orthophoto-based visual results in terms of bloom outbreak density and spatial distribution; (3) the prediction window size was closely related to the spatial resolution of data. The prediction window of different sizes directly affected the accuracy of water bloom prediction results. Compared with the window size of 8×8, 12×12, and 14×14, the highest accuracy (0.98), precision (0.77), and Kappa (0.77) were obtained with a window size of 10×10. Hence, the 10×10 prediction window was the most suitable for the water bloom prediction in this study area. The model developed here can effectively predict water bloom in lakes and reservoirs in advance, which provides a reference for improving short-term water bloom prediction and warning.
Key words: water bloom; prediction model; UAV remote sensing; MPP; GWR; water quality parameters
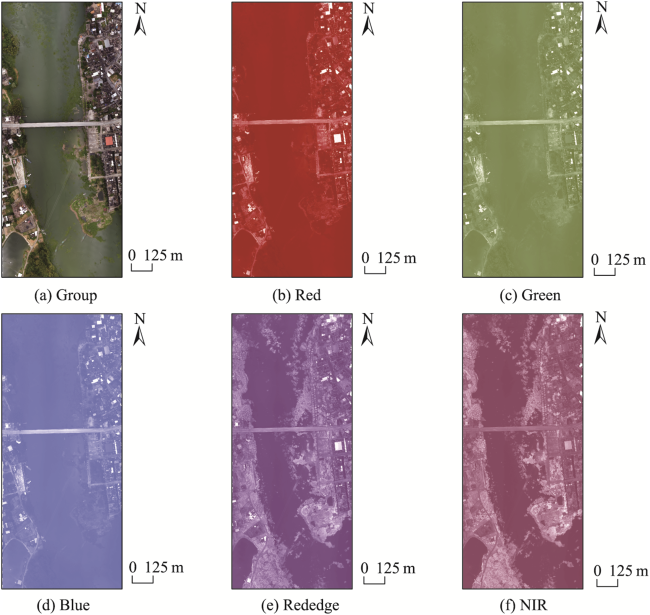
表1 无人机传感器参数及影像采集时间Tab. 1 UAV sensor parameters and image acquisition time |
| 传感器 | 波段 | 波段名称 | 波长范围 | 采集时间(2022年夏季某月) |
|---|---|---|---|---|
| P4 Multispectral多光谱相机 | b1 | Blue | 450 nm ± 16 nm | 21日10:30 |
| b2 | Green | 560 nm ± 16 nm | 21日14:00 | |
| b3 | Red | 650 nm ± 16 nm | 21日17:30 | |
| b4 | Red Edge | 730 nm ± 16 nm | 22日10:30 | |
| b5 | NIR | 840 nm ± 26 nm | 22日14:00 | |
| MAVIC 2 Enterprise红外相机 | b1 | IR | 8~14 μm | 22日17:30 |
表2 实测数据(部分)Tab. 2 Measured data (part) |
| 时间 | pH | DO/(mg/L) | TN/(mg/L) | TP/(mg/L) | 风速/(m/s) | 风向/° | 流速/(m/s) |
|---|---|---|---|---|---|---|---|
| 21日10:30 | 8.12 | 7.54 | 0.87 | 0.041 | 1.2 | 264.6 | 0.21 |
| 21日10:30 | 8.16 | 7.68 | 0.84 | 0.050 | 1.2 | 267.5 | 0.23 |
| 21日10:30 | 8.23 | 8.56 | 0.91 | 0.047 | 1.2 | 266.1 | 0.21 |
| 21日10:30 | 8.17 | 5.96 | 0.85 | 0.042 | 1.2 | 263.8 | 0.21 |
| 21日10:30 | 8.29 | 9.28 | 0.87 | 0.048 | 1.2 | 267.6 | 0.21 |
| 21日14:00 | 8.18 | 7.96 | 0.82 | 0.051 | 1.5 | 280.3 | 0.12 |
| 21日14:00 | 8.19 | 8.13 | 0.88 | 0.046 | 1.5 | 278.7 | 0.11 |
| 21日14:00 | 8.26 | 9.21 | 0.86 | 0.042 | 1.5 | 278.6 | 0.12 |
| 21日14:00 | 8.20 | 10.02 | 0.81 | 0.051 | 1.5 | 279.5 | 0.12 |
| 21日14:00 | 8.27 | 8.64 | 0.92 | 0.047 | 1.5 | 280.1 | 0.11 |
| 21日17:30 | 8.19 | 7.95 | 0.84 | 0.043 | 1.3 | 245.6 | 0.16 |
| 21日17:30 | 8.18 | 8.97 | 0.82 | 0.049 | 1.3 | 247.8 | 0.16 |
| 21日17:30 | 8.21 | 7.69 | 0.84 | 0.049 | 1.3 | 246.6 | 0.17 |
| 21日17:30 | 8.25 | 9.98 | 0.90 | 0.047 | 1.3 | 243.9 | 0.16 |
| 21日17:30 | 8.26 | 9.63 | 0.87 | 0.045 | 1.3 | 246.3 | 0.16 |
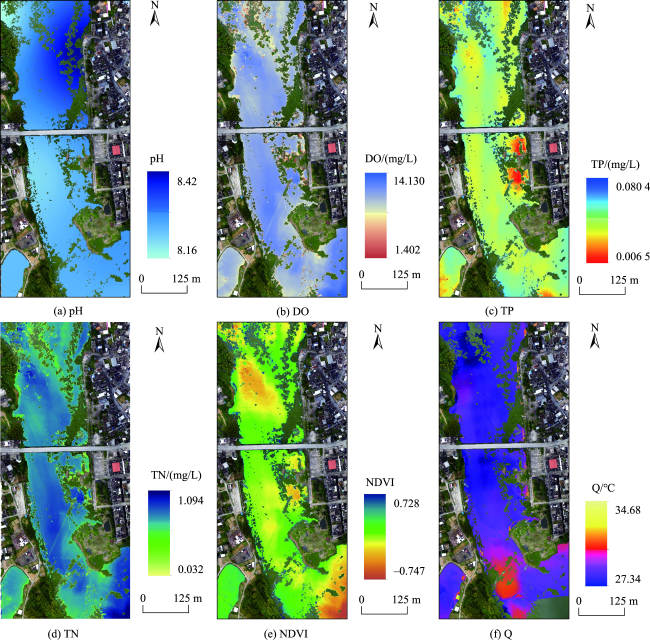
表3 水质参数模型表达式及精度Tab. 3 Water quality parameter model expression and precision |
| 水质参数 | 最佳波段 | r | 模型表达式 | R2 |
|---|---|---|---|---|
| TP | (b2+b3)/b5 | 0.45 | y=0.07839e1.0483x | 0.78 |
| TN | b1×b4 | 0.50 | y=0.04872x2-0.02873x+0.08913 | 0.80 |
| DO | (b3-b2)/b4 | 0.52 | y=0.07254x2-0.00871x+0.96418 | 0.72 |
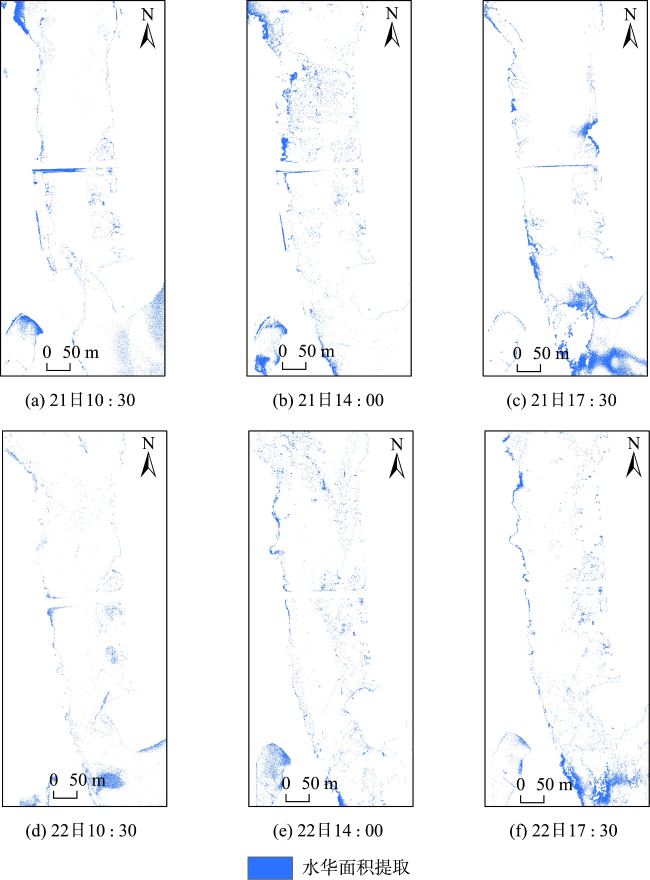
图13 水华提取结果(21日10:30—22日17:30)Fig. 13 Bloom extraction results (10:30, 21st—17:30, 22nd) |
表4 水华面积提取信息Tab. 4 Bloom area extraction information |
| 时间 | 像元数目/个 | 面积m2 |
|---|---|---|
| 21日10:30 | 1 354 627 | 109.72 |
| 21日14:00 | 1 493 579 | 120.97 |
| 21日17:30 | 1 588 194 | 128.64 |
| 22日10:30 | 1 030 591 | 83.47 |
| 22日14:00 | 1 186 588 | 96.11 |
| 22日17:30 | 1 298 194 | 105.15 |
表5 水华提取像元个数(22日17:30)Tab. 5 Number of pixels extracted from bloom (17:30 on 22nd) |
| 数据 | 水华像元数/个 | 非水华像元数/个 | 水华面积预测误差/% |
|---|---|---|---|
| NDVI阈值提取结果 | 1 298 194 | 29 536 489 | - |
| 8×8预测窗口预测结果 | 1 175 486 | 29 659 197 | 9.45 |
| 10×10预测窗口预测结果 | 1 248 745 | 29 585 938 | 3.81 |
| 12×12预测窗口预测结果 | 1 021 482 | 29 813 201 | 21.32 |
| 14×14预测窗口预测结果 | 847 268 | 29 987 415 | 34.73 |
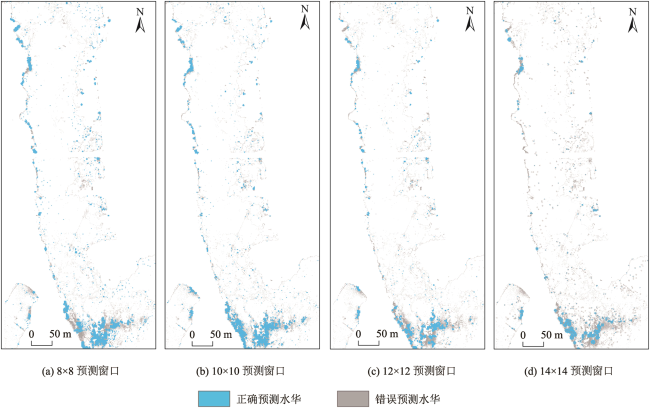
图15 水华预测正确像元和错误像元分布情况Fig. 15 Distribution of correct and wrong pixels in the prediction of water bloom |
表6 4种预测窗口预测结果的精度指标Tab. 6 Precision index of prediction results of four prediction windows |
| 预测窗口 | 预测类型 | 提取类型 | 生产者精度 | 总体分类精度 | Kappa系数 | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| 水华 | 非水华 | |||||||||
| 8×8 | 水华 | 860 661 | 314 825 | 0.66 | 0.98 | 0.68 | ||||
| 非水华 | 437 533 | 29 221 664 | ||||||||
| 10×10 | 水华 | 997 949 | 250 796 | 0.77 | 0.98 | 0.77 | ||||
| 非水华 | 300 245 | 29 285 693 | ||||||||
| 12×12 | 水华 | 708 751 | 312 731 | 0.55 | 0.97 | 0.59 | ||||
| 非水华 | 589 443 | 29 223 758 | ||||||||
| 14×14 | 水华 | 588 348 | 258 920 | 0.45 | 0.97 | 0.53 | ||||
| 非水华 | 709 846 | 29 277 569 | ||||||||
| [1] |
段恬媛. 湖库型饮用水水源地水安全评价及风险评估[D]. 四川: 西南交通大学, 2021.
[
|
| [2] |
刘绍俊, 施艳峰, 翟竟余, 等. 星云湖微囊藻密度周年变化及其与水质指标的关系[J]. 环境化学, 2021, 40(7):2064-2072.
[
|
| [3] |
史小丽, 杨瑾晟, 陈开宁, 等. 湖泊蓝藻水华防控方法综述[J]. 湖泊科学, 2022, 34(2):349-375.
[
|
| [4] |
姚金忠, 范向军, 杨霞, 等. 三峡库区重点支流水华现状、成因及防控对策[J]. 环境工程学报, 2022, 16(6):2041-2048.
[
|
| [5] |
|
| [6] |
|
| [7] |
秦伯强. 浅水湖泊湖沼学与太湖富营养化控制研究[J]. 湖泊科学, 2020, 32(5):1229-1243.
[
|
| [8] |
|
| [9] |
|
| [10] |
嵇晓燕, 张迪, 李文攀, 等. 湖泊蓝藻天地一体化监测业务化运行平台的构建——以滇池流域为例[J]. 环境保护, 2016, 44(18):24-27.
[
|
| [11] |
邱银国, 段洪涛, 万能胜, 等. 巢湖蓝藻水华监测预警与模拟分析平台设计与实践[J]. 湖泊科学, 2022, 34(1):38-48.
[
|
| [12] |
段洪涛, 曹志刚, 沈明, 等. 湖泊遥感研究进展与展望[J]. 遥感学报, 2022, 26(1):3-18.
[
|
| [13] |
张运林, 张毅博, 李娜, 等. 利用陆基高光谱遥感捕捉太湖蓝藻水华日内快速变化过程[J]. 湖泊科学, 2021, 33(6):1951-1960.
[
|
| [14] |
张虎军, 宋挺, 朱冰川, 等. 太湖蓝藻水华暴发程度年度预测[J]. 中国环境监测, 2022, 38(1):157-164.
[
|
| [15] |
吴娟, 朱跃龙, 金松, 等. 三种机器学习模型在太湖藻华面积预测中的应用[J]. 河海大学学报(自然科学版), 2020, 48(6):542-551.
[
|
| [16] |
祁国华, 马晓双, 何诗瑜, 等. 基于多源遥感数据的巢湖水华长时序时空变化(2009—2018年)分析与发生概率预测[J]. 湖泊科学, 2021, 33(2):414-427.
[
|
| [17] |
刘东, 张民, 沈明. 基于遥感藻总量和气象因子的巢湖不同湖区藻华预测[J]. 湖泊科学, 2022, 34(4):1090-1101.
[
|
| [18] |
|
| [19] |
丁铭, 李旭文, 姜晟. 基于无人机高光谱遥感在太湖蓝藻水华监测中的一次应用[J]. 环境监测管理与技术, 2022, 34(1):49-51,71.
[
|
| [20] |
|
| [21] |
|
| [22] |
潘鑫, 杨子, 杨英宝, 等. 基于高分六号数据提取太湖蓝藻方法的对比及适用性分析[J]. 湖泊科学, 2022, 34(6):1866-1876.
[
|
| [23] |
窦世卿, 张寒博, 徐勇, 等. TRMM降水数据在长江流域的降尺度分析与校正[J]. 中国农业气象, 2021, 42(5):377-389.
[
|
| [24] |
覃文忠. 地理加权回归基本理论与应用研究[D]. 上海: 同济大学, 2007.
[
|
| [25] |
叶章熙, 郭倩, 张健, 等. 基于无人机可见光影像与OBIA-RF算法的城市不透水面提取[J]. 农业工程学报, 2022, 38(4):225-234.
[
|
| [26] |
赵晶. 水库悬浮物遥感模型及其时空动态Markov评价[D]. 昆明: 昆明理工大学, 2020.
[
|
| [27] |
李俊, 张文志, 邓孺孺, 等. 高分一号WFV影像的深圳市水库CODMn浓度时空分布特征[J]. 遥感学报, 2022, 26(8):1562-1574.
[
|
| [28] |
李怡静, 孙晓敏, 郭玉银, 等. 基于梯度提升决策树算法的鄱阳湖水环境参数遥感反演[J]. 航天返回与遥感, 2020, 41(6):90-102.
[
|
| [29] |
何报寅, 丁超, 杨小琴, 等. Landsat7 ETM+ SLC-OFF数据的修复及其在武汉东湖水质反演中的应用[J]. 长江流域资源与环境, 2011, 20(1):90-95.
[
|
| [30] |
晁明灿, 赵强, 杨铁利, 等. 基于Landsat8影像的蓝藻水华提取方法对比研究[J]. 大气与环境光学学报, 2021, 16(6):520-528.
[
|
| [31] |
李一民, 谭振宇, 杨辰, 等. 基于多源卫星的滇池藻华提取机器学习算法研究[J]. 地球科学进展, 2022, 37(11):1141-1156.
[
|
| [32] |
杨素, 万荣荣, 李冰. 太湖流域水文连通性:现状、研究进展与未来挑战[J]. 湖泊科学, 2022, 34(4):1055-1074.
[
|
| [33] |
|
/
| 〈 |
|
〉 |



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}