
基于改进HLT与深度学习的双时相PolSAR洪涝灾害监测新方法
|
刘文宋(1988— ),男,山东潍坊人,博士,讲师,主要从事PolSAR影像解译方法研究。E-mail: wensongliu@jsnu.edu.cn |
收稿日期: 2022-12-19
修回日期: 2023-01-06
网络出版日期: 2023-07-14
基金资助
国家自然科学基金项目(62201232)
国家自然科学基金项目(62101219)
江苏省自然科学基金项目(BK20210921)
江苏省自然科学基金项目(BK20201026)
A Novel Flood Disaster Monitoring Method based on Improved HLT and Deep Learning Using Bi-temporal PolSAR Images
Received date: 2022-12-19
Revised date: 2023-01-06
Online published: 2023-07-14
Supported by
National Natural Science Foundation of China(62201232)
National Natural Science Foundation of China(62101219)
Natural Science Foundation of JiangSu Province(BK20210921)
Natural Science Foundation of JiangSu Province(BK20201026)
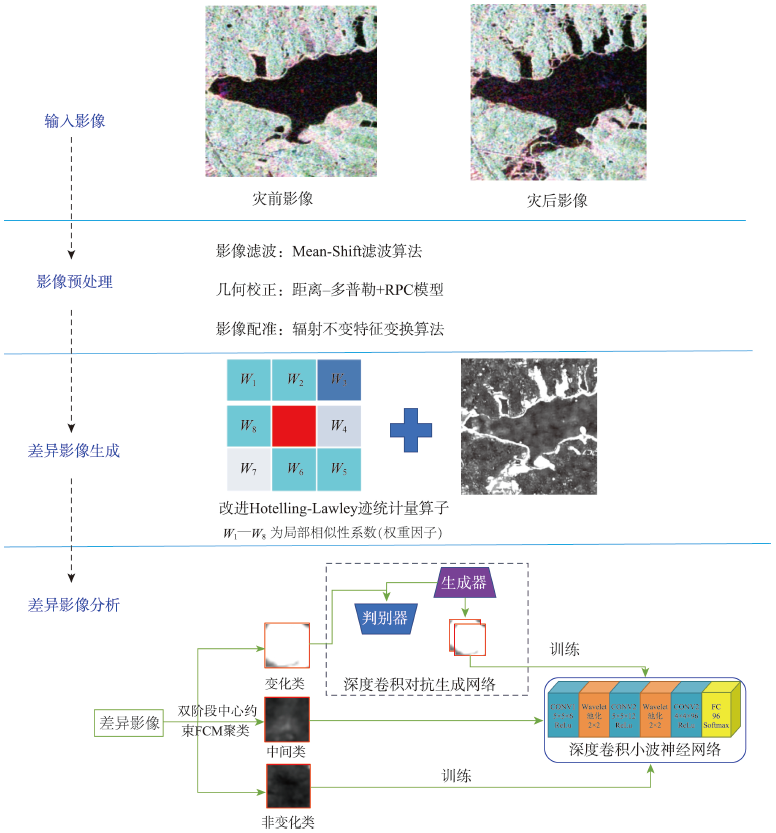
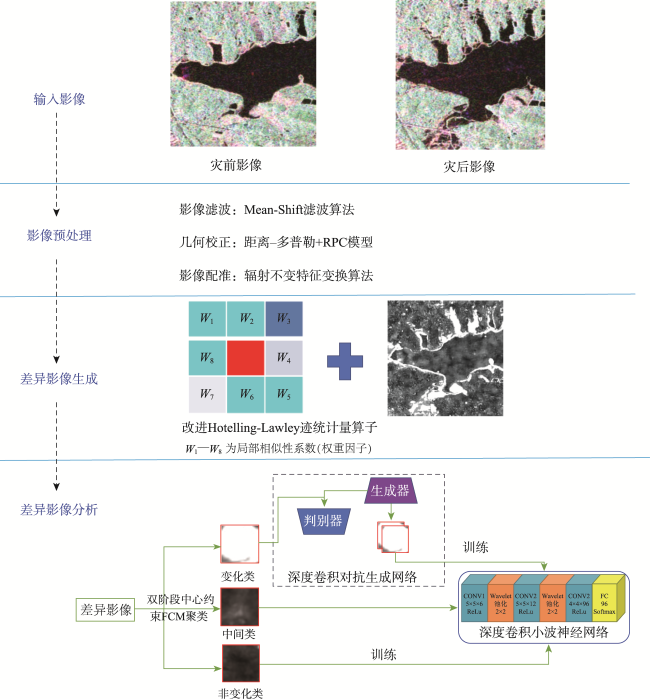
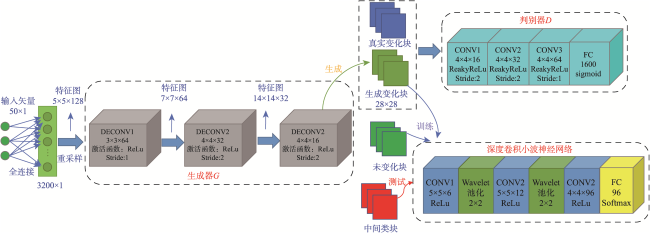
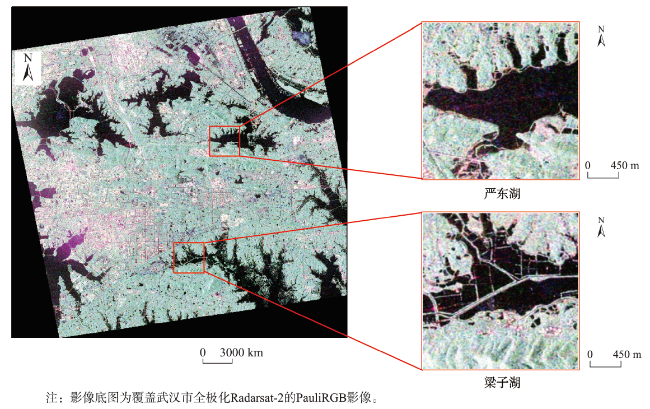
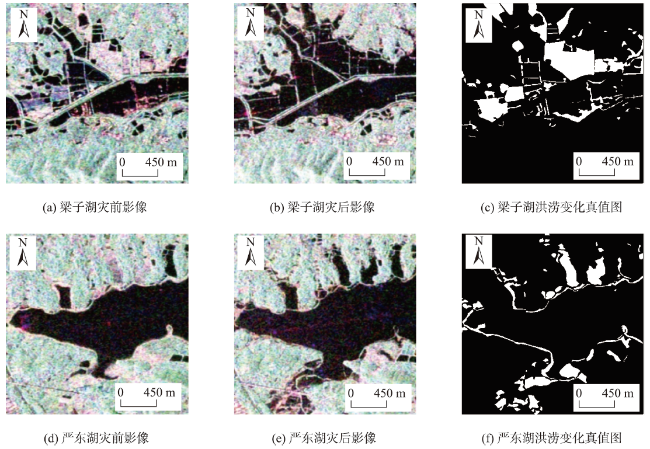
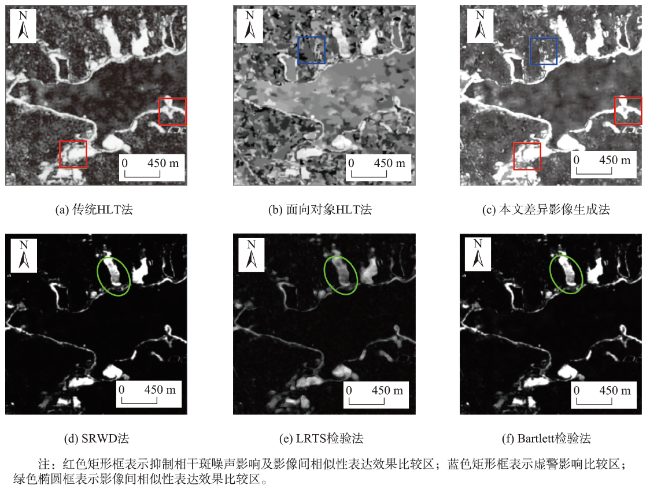
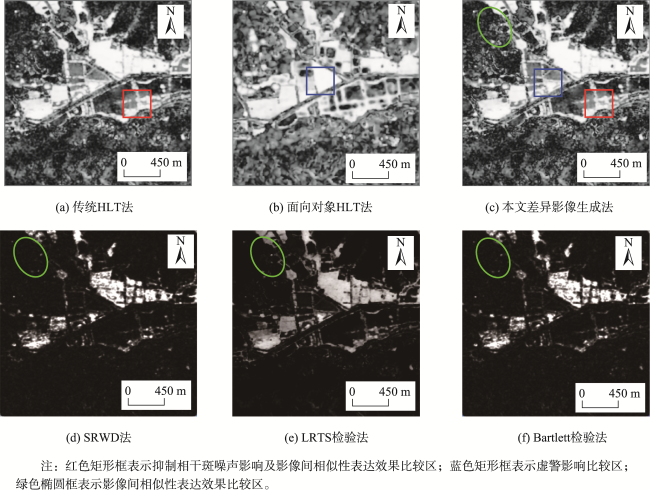
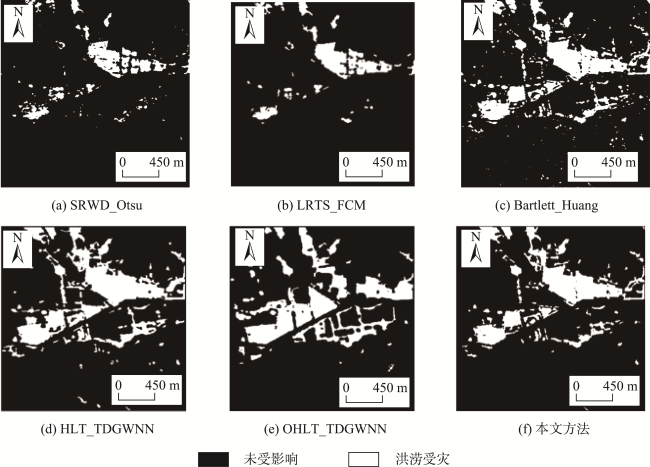
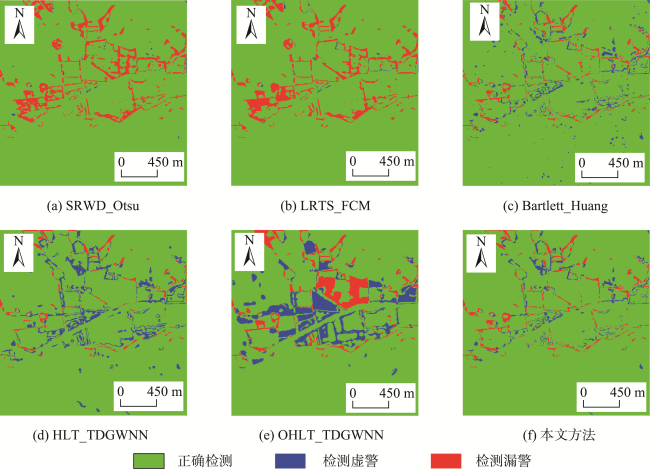
全极化合成孔径雷达(PolSAR)通过主动收发不同极化方式的微波信号,可为全天时、全天候获取洪涝受灾信息提供有利的数据支持。然而,传统基于PolSAR影像的洪涝灾害监测方法受相干斑噪声影响严重,且洪涝灾害引发的变化类与非变化类的类别不平衡易导致灾害监测精度低。针对以上问题,本文提出了一种基于改进HLT与深度学习的双时相PolSAR洪涝灾害监测新方法。首先,通过构建一种顾及邻域信息的改进Hotelling-Lawley迹(HLT)统计量算子,减少PolSAR影像相干斑噪声及空间异质性对差异影像生成的影响;其次,为解决洪涝受灾区域变化类样本不足及变化类与非变化类不平衡的问题,引入双阶段中心约束FCM(TCCFCM)算法与深度卷积对抗生成网络(DCGAN)模型,形成一种稳健的洪涝灾害样本选择与扩充方法;最后,通过构建一种深度卷积小波神经网络(DCWNN)模型实现洪涝灾害精确监测。为了验证本文方法的可行性与鲁棒性,本文选取了2016年7月武汉梁子湖与严东湖洪涝灾害发生前后Radarsat-2影像进行实验。定性与定量评价结果表明:相对于传统的洪涝灾害监测方法,本文方法综合降低洪涝灾害监测的虚警率与漏警率分别为2%及1.5%左右,而监测洪涝灾害的总体精度与Kappa系数可分别提升3%及0.02左右,为相关部门应急救灾等工作提供技术支持。
关键词: 洪涝灾害; PolSAR影像; 改进HLT算子; 类别不平衡; 双阶段中心约束FCM算法; 深度卷积对抗生成网络; 深度卷积小波神经网络
刘文宋 , 张仲英 , 郑琳 , 郭风成 . 基于改进HLT与深度学习的双时相PolSAR洪涝灾害监测新方法[J]. 地球信息科学学报, 2023 , 25(8) : 1730 -1745 . DOI: 10.12082/dqxxkx.2023.220985
Rapidly and accurately monitor the flood disaster is very important, which can protect people's life and property safety and realize the sustainable development of society. The polarimetric synthetic aperture radar (PolSAR) image can obtain all-day and all-weather information of flood disaster by transmitting and receiving electromagnetic microwave of different polarizations, which can provide more favorable data support for flood disaster monitoring. However, the traditional flood disaster monitoring methods based on PolSAR images are seriously affected by speckle noise and the class imbalance between changed class and un-changed class leads to low accuracy of disaster monitoring. To address issues, a novel flood disaster monitoring method based on the improved Hotelling-Lawley Trace (HLT) statistic operator and deep learning for small area change using bi-temporal PolSAR images was proposed in this paper. Within this method, the HLT statistic operator was firstly constructed by considering the neighborhood information of PolSAR images, which can reduce the influence of speckle noise and spatial heterogeneity for the generation of the difference image in this paper. Secondly, the Two-stage Center-Constrained Fuzzy C-Means clustering (TCCFCM) algorithm and the Deep Convolutional Generative Adversarial Network (DCGAN) were introduced to build a robust method of sample select and express when lacked the changed samples over disaster areas, which can solve the problem of the class imbalance between changed and un-changed class. Finally, the Deep Convolutional Wavelet Neural Network (DCWNN) was constructed to achieve accurate monitoring of flood disasters. In order to verify the feasibility and robustness of the proposed method, the Radarsat-2 images covered Wuhan city before and after flood disaster were selected in July, 2016. The qualitative and quantitative results show that the proposed method can reduce the missed alarm rate and false alarm rate of flood disaster monitoring, and significantly improve the Overall Accuracy (OA) and Kappa coefficient (Kappa) of disaster monitoring, i.e. the false alarm rate and missed alarm rate of flood disaster monitoring are reduced respectively 1.5% and 2%, meanwhile, the OA and Kappa coefficient of flood disaster monitoring are significantly improved 3% and 0.02 when compared with the traditional methods of flood disaster monitoring, which can provide technical support of emergency relief work for relevant departments.
Key words: flood disaster; PolSAR image; improved HLT operator; class imbalance; TCCFCM algorithm; DCGAN; DCWNN
| 算法1:TCCFCM算法 |
|---|
| 第一阶段(寻找可靠的聚类中心) ① 分别选取Np个差异影像DI中像素值绝对值最大和最小的样本,初始化隶属度划分矩阵U1 ② 通过FCM算法获取可靠的变化类与非变化类的聚类中心 第二阶段(输出更为准确聚类结果) ① 将第一阶段获取的变化类与非变化类的聚类中心 作为初始隶属度划分矩阵U2,并以此约束第二阶段FCM聚类 ② 再次利用FCM算法对差异影像DI所有像素,将对差异影像所有像素对应标签分别赋予划分为变化类、非变化类与中间类 |
表1 PolSAR影像相关参数Tab. 1 The relative parameters of PolSAR images |
| 获取时间 | 传感器 | 波段 | 观测模式 | 处理级别 | 极化方式 | 入射角/° | 轨道方向 |
|---|---|---|---|---|---|---|---|
| 2015-06-25 | Radarsat-2 | C | FQ21 | 单视复影像 | 全极化 | 40.2 | 升轨 |
| 2016-07-06 | Radarsat-2 | C | FQ21 | 单视复影像 | 全极化 | 45.2 | 升轨 |
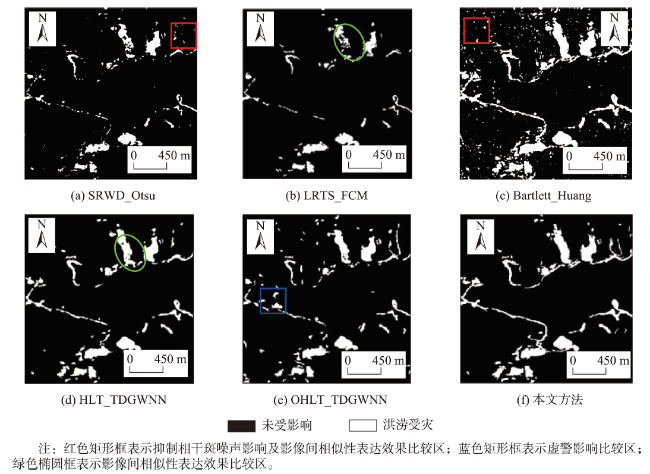
表2 严东湖不同洪涝灾害监测方法精度定量比较结果Tab. 2 Quantitative evaluation of different monitoring algorithms over YanDong Lake |
| 方法 | 虚警率/% | 漏警率/% | 总体精度/% | Kappa系数 |
|---|---|---|---|---|
| SRWD_Otsu | 0.541 | 4.853 | 94.606 | 0.594 |
| LRTS_FCM | 8.241 | 0.947 | 90.812 | 0.596 |
| Bartlett_Huang | 4.452 | 1.661 | 93.887 | 0.680 |
| HLT_TDGWNN | 2.668 | 2.957 | 94.375 | 0.743 |
| OHLT_TDGWNN | 1.826 | 3.939 | 94.235 | 0.618 |
| 本文方法 | 1.495 | 2.196 | 96.309 | 0.761 |
注:加粗字体表示各定量评价参数中最优值。 |
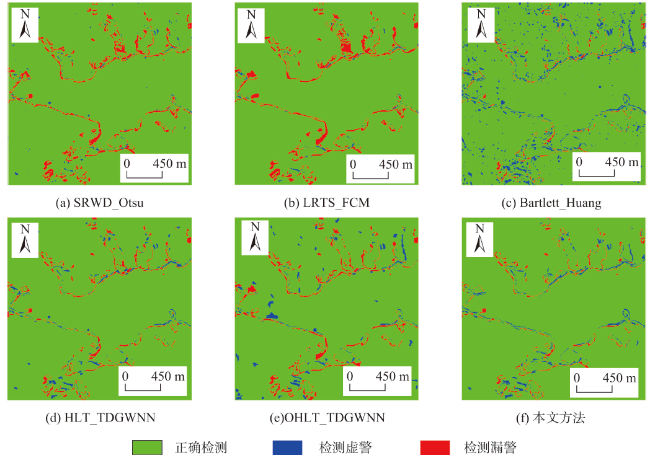
表3 梁子湖地区不同洪涝监测方法定量精度评价结果Tab. 3 Quantitative evaluation of different monitoring algorithms over Liangzi Lake |
| 方法 | 虚警率/% | 漏警率/% | 总体精度/% | Kappa系数 |
|---|---|---|---|---|
| SRWD_Otsu | 0.260 | 8.221 | 91.518 | 0.529 |
| LRTS_FCM | 0.264 | 7.871 | 91.865 | 0.555 |
| Bartlett_Huang | 3.368 | 3.246 | 93.385 | 0.722 |
| HLT_TDGWNN | 5.956 | 3.194 | 91.832 | 0.692 |
| OHLT_TDGWNN | 9.338 | 6.043 | 84.618 | 0.412 |
| 本文方法 | 2.710 | 2.221 | 94.096 | 0.748 |
注:加粗字体表示各定量评价参数中最高值。 |
表4 不同洪涝灾害监测方法耗时比较Tab. 4 The time-consuming comparison of different flood disaster monitoring methods |
| 方法 | 监测耗时/s | |
|---|---|---|
| SRWD_Otsu | 2.120 6 | |
| LRTS_FCM | 2.684 8 | |
| Bartlett_Huang | 2.987 7 | |
| HLT_TDGWNN | 10.732 2 | |
| OHLT_TDGWNN | 18.539 4 | |
| 本文方法 | 12.599 3 | |
| [1] |
范一大, 吴玮, 王薇, 等. 中国灾害遥感研究进展[J]. 遥感学报, 2016, 20(5):1170-1184.
[
|
| [2] |
解文欢, 张有智, 刘述彬. 农业洪涝灾害研究进展[J]. 中国农业资源与区划, 2020, 41(1):204-211.
[
|
| [3] |
黄诗峰, 马建威, 孙亚勇. 我国洪涝灾害遥感监测现状与展望[J]. 中国水利, 2021(15):15-17.
[
|
| [4] |
胡凯龙, 刘明, 刘明博, 等. 高分多模卫星在洪涝灾害监测中的应用[J]. 航天器工程, 2021, 30(3):218-224.
[
|
| [5] |
郁宗桥, 王育红, 刘文宋, 等. 顾及GF-3影像纹理特征的洪涝范围提取方法[J]. 测绘通报, 2022(5):26-31.
[
|
| [6] |
|
| [7] |
|
| [8] |
郭山川, 杜培军, 蒙亚平, 等. 时序Sentinel-1A数据支持的长江中下游汛情动态监测[J]. 遥感学报, 2021, 25(10):2127-2141.
[
|
| [9] |
|
| [10] |
眭海刚, 赵博飞, 徐川, 等. 多模态序列遥感影像的洪涝灾害应急信息快速提取[J]. 武汉大学学报·信息科学版, 2021, 46(10):1441-1449.
[
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
伍俊斌, 刘雷震, 田丰, 等. 面向重大洪涝灾害应急响应的灾情动态评估方法研究——以2018年8月山东寿光洪涝灾害为例[J]. 北京师范大学学报(自然科学版), 2020, 56(6):846-855.
[
|
| [21] |
|
| [22] |
李加林, 曹罗丹, 浦瑞良. 洪涝灾害遥感监测评估研究综述[J]. 水利学报, 2014, 45(3):253-260.
[
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}