
考虑驾驶员驾驶风格的车辆跟驰模型
|
林志坤(1997— ),男,福建漳州人,硕士生,主要从事地理信息服务与时空数据挖掘研究。E-mail: 205520015@fzu.edu.cn |
收稿日期: 2023-03-11
修回日期: 2023-05-17
网络出版日期: 2023-09-05
Car-Following Model Considering Driver's Driving Style
Received date: 2023-03-11
Revised date: 2023-05-17
Online published: 2023-09-05
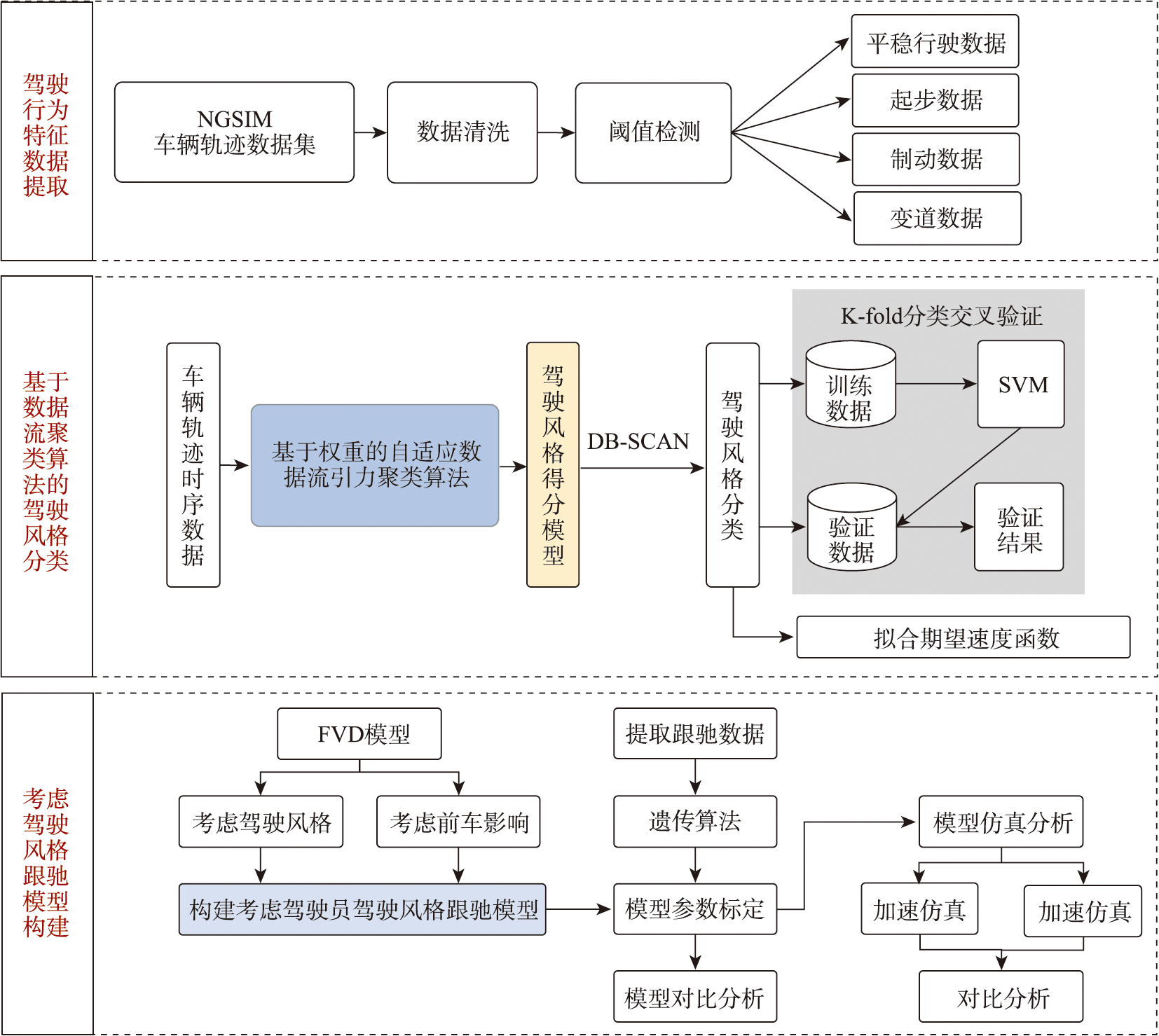
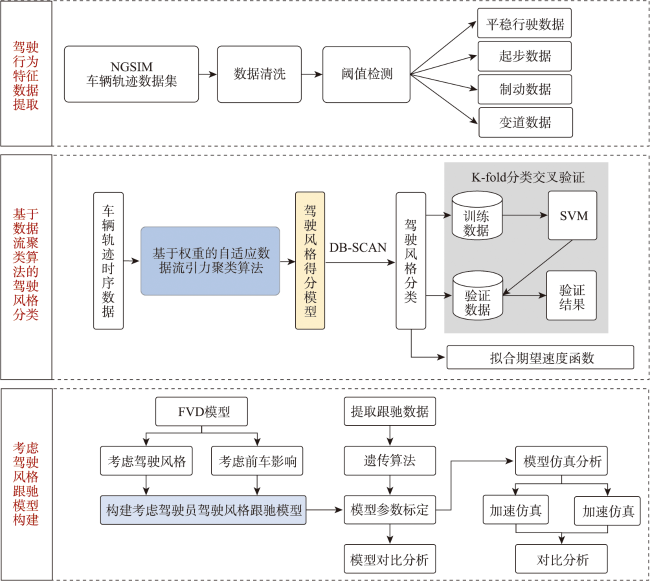
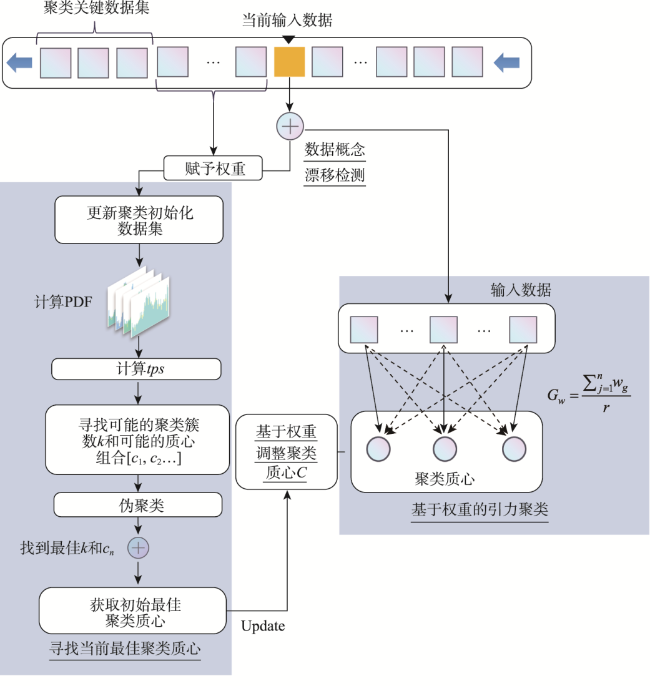
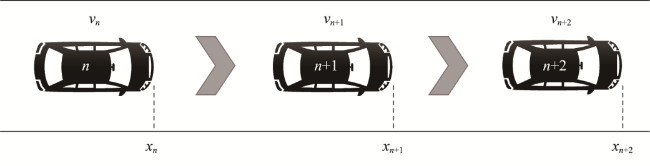
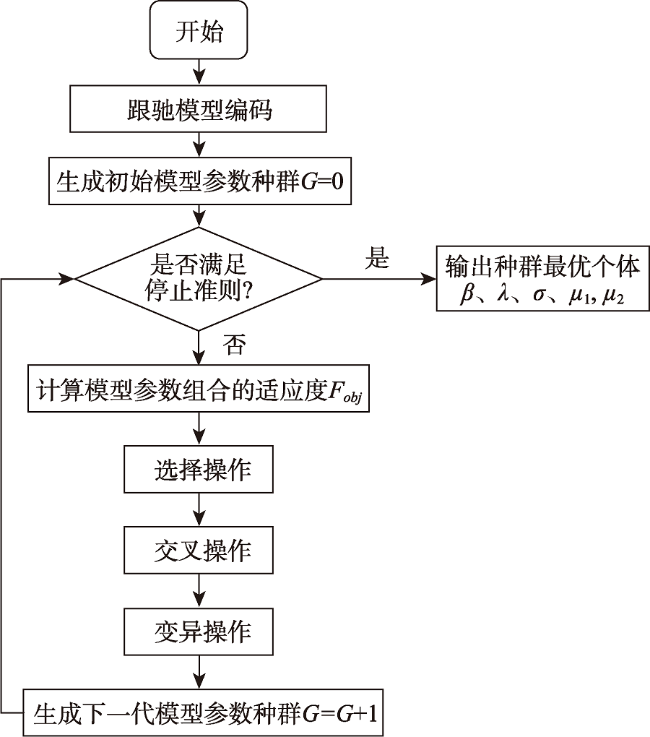
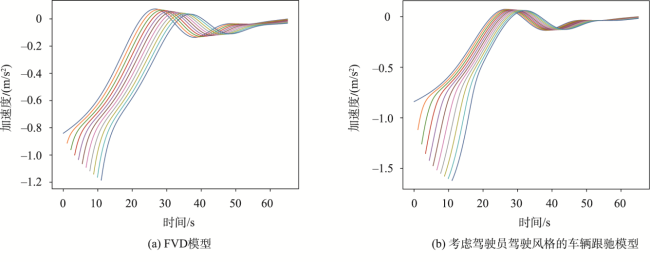
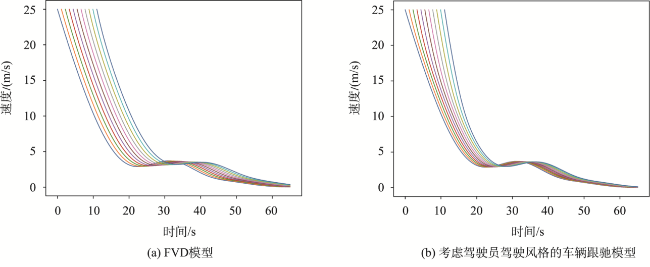
跟驰行为研究旨在探究单行道上前车运动状态的变化对后车行驶状态的影响,通过建立相应的跟驰模型进行仿真研究,可以揭示交通拥堵、交通流震荡等交通现象的内在机理,有助于研究交通流的稳定性、道路通行能力和运行效率。由于驾驶经验、性格等特征的差异,驾驶员会表现出不同的跟车特征。然而,传统的跟驰模型往往假设驾驶员的驾驶行为是同质的,较少考虑通行车辆驾驶风格的差异,这与实际情况不符。为此,本文首先提取了路面通行车辆的4种驾驶行为特征(变道、起步、制动、平稳行驶),开发了基于权重的自适应数据流引力聚类(Weight-based Adaptive Data Stream Gravity Clustering, WAStream)算法,分别对不同驾驶行为特征时序数据进行聚类分析,进而根据驾驶风格评分模型量化了驾驶员不同驾驶行为的激进程度,实现了通行车辆驾驶风格的有效分类;接着通过分析不同风格驾驶员的跟驰数据,构建不同风格车辆的速度期望函数,并充分考虑主车与驾驶视野中多辆前车的速度差、加速度差等影响,提出了一种考虑驾驶员驾驶风格的车辆跟驰模型;最后基于NGSIM车辆轨迹数据,利用遗传算法标定考虑驾驶员驾驶风格的车辆跟驰模型的关键参数,实现模型的验证和数值仿真分析。实验结果表明:与经典的FVD模型相比,所提出的跟驰模型能够更好地拟合车辆跟驰数据,其MAE、MAPE、RMSE分别减小了1.511 m/s2、6.122%、1.064 m/s2;同时,该模型能够有效降低车辆在跟驰行为中的延迟性,构建更逼近真实情况的交通流场景,提高了交通流的稳定性。本研究提出的跟驰模型能够为交通运输规划和管理部门提供有效的决策信息,为微观交通仿真研究提供模型参考。
林志坤 , 吴小竹 . 考虑驾驶员驾驶风格的车辆跟驰模型[J]. 地球信息科学学报, 2023 , 25(9) : 1798 -1812 . DOI: 10.12082/dqxxkx.2023.230121
The research on car-following behavior aims to explore the impact of the leading vehicle's movement on the following vehicle's driving state on a one-way road. By establishing corresponding car-following models for simulation studies, it can reveal the underlying mechanism of traffic congestion, traffic flow oscillation, and other traffic phenomena, which is helpful for evaluating the stability, road capacity, and operational efficiency of traffic flow. Due to differences in driving experience, personality, and other characteristics, drivers may exhibit different car-following characteristics. Moreover, under the same conditions, the car-following behavior of different drivers may differ, and the car-following behavior of the same driver may also vary at different times. However, traditional car-following models often assume that drivers' driving behavior is homogeneous and rarely consider differences in driving styles among passing vehicles, which is inconsistent with actual situations. Therefore, this paper first extracts four driving behaviors of passing vehicles on the road (lane changing, starting, braking, and smooth driving), develops a Weight-based Adaptive Data Stream Gravity Clustering (WAStream) algorithm based on weights, and conducts clustering analysis on the time-series data of different driving behavior characteristics. Then, according to the driving style scoring model, the aggressiveness of different driving behaviors of drivers is quantified, the effective classification of driving styles of passing vehicles is achieved, and the overall driving behavior characteristics of different style driver groups are obtained. Next, by analyzing the car-following data of drivers with different styles, a speed expectation function for different style vehicles is constructed. Furthermore, the proposed car-following model considers the impact of speed and acceleration differences between the leading vehicle and multiple front vehicles in the driver's field of vision, which considers the driver's driving style. Finally, based on the NGSIM vehicle trajectory data, the key parameters of the car-following model considering the driver's driving style are calibrated using genetic algorithms, and the model's validation and numerical simulation analysis are achieved. The experimental results show that compared with the classical FVD model, the proposed car-following model can better fit the car-following data, and the MAE, MAPE, and RMSE are reduced by 1.511 m/s2, 6.122%, and 1.064 m/s2, respectively. At the same time, the model can effectively reduce the delay of vehicles in car-following behavior, construct traffic flow scenarios closer to reality, and improve the stability of traffic flow. The car-following model proposed in this study can provide effective decision-making information for transportation planning and management departments and provide model references for micro-traffic simulation studies.
表1 车辆轨迹重构数据集Tab. 1 Vehicle trajectory reconstruction dataset |
| 数据 | 描述 | 单位 |
|---|---|---|
| Vehicle_Id | 车辆识别号 | - |
| Time | 驾驶行为事件记录的时间 | - |
| Ave_Vel | 车辆平均速度 | m/s |
| Ave_Acc | 车辆的平均加速度 | m |
| Ave_Space_Headway | 平均车头间距 | m |
| Ave_Time_Headway | 平均车头时距 | s |
表2 各驾驶行为关键评价指标Tab. 2 Key evaluation indicators of each driving behavior |
| 驾驶行为 | 变道 | 起步 | 制动 | 平稳行驶 |
|---|---|---|---|---|
| 关键评价指标 | 速度(m/s) | 加速度(m/s2) | 加速度(m/s2) | 速度(m/s) |
表3 驾驶风格得分数据示例Tab. 3 Example of driving style score data |
| 车辆ID | 制动风格得分 | 起步风格得分 | 变道风格得分 | 平稳行驶风格得分 |
|---|---|---|---|---|
| #1 | 0.072 | 1.000 | 0.450 | 1.000 |
| #2 | 0.794 | 0.721 | 0.587 | 1.000 |
| #3 | 0.443 | 0.063 | 0.862 | 1.000 |
| #4 | 0.579 | 0.535 | 0.449 | 0.709 |
| … | … | … | … | … |
| #2442 | 0.540 | 0.512 | 0.445 | 0.635 |
表4 车辆跟驰数据示例Tab. 4 Example of car following data |
| /(m/s) | /(m/s2) | /(m/s) | /(m/s2) | /m | /(m/s) | /(m/s2) | /m |
|---|---|---|---|---|---|---|---|
| -0.213 | 0.003 | 12.398 | -1.024 | 11.214 | 12.185 | -1.203 | 15.849 |
| -0.358 | 0.091 | 12.431 | 0.338 | 11.219 | 12.074 | -1.112 | 15.838 |
| -0.469 | 0.298 | 12.461 | 0.292 | 11.184 | 11.993 | -0.814 | 15.870 |
| … | … | … | … | … | … | … | … |
| -0.523 | 0.518 | 12.485 | 0.246 | 11.105 | 11.963 | -0.295 | 15.948 |
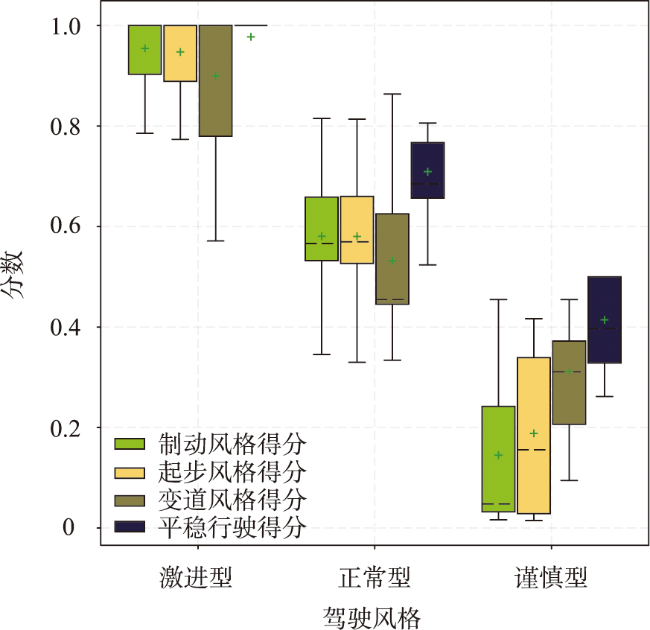
表5 不同风格驾驶员的驾驶行为特征Tab. 5 Driving behavior characteristics of drivers with different driving styles |
| 驾驶特征 | 激进型 | 正常型 | 谨慎型 |
|---|---|---|---|
| 平均最大速度/(m/s) | 14.51 | 10.43 | 9.04 |
| 平均最大加速度/(m/s2) | 5.77 | 4.80 | 4.51 |
| 平均最小车头时距/s | 1.22 | 2.04 | 2.77 |
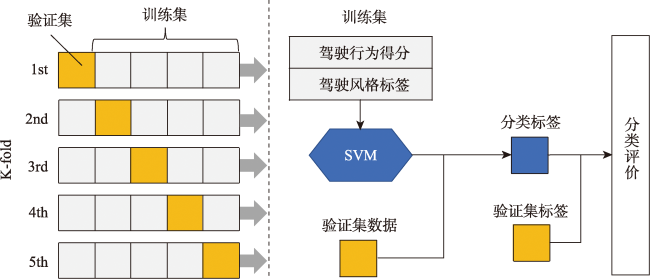
表6 驾驶风格分类验证结果Tab. 6 Validation results of driving style classification (%) |
| K-fold | 平均准确率A | 平均精确率P | 平均召回率R | F1 |
|---|---|---|---|---|
| 3-fold | 87.297 | 86.772 | 87.567 | 87.144 |
| 5-fold | 97.461 | 96.894 | 97.864 | 97.346 |
表7 跟驰模型参数标定结果Tab. 7 Calibration results of the follower model parameters |
| FVD模型 | 考虑驾驶员驾驶风格的跟驰模型 | |
|---|---|---|
| 参数标定结果 | =0.053 =0.493 | =0.014, =0.199, = -0.145, =1.765, = -1.294 |
| 2.713 | 1.892 |
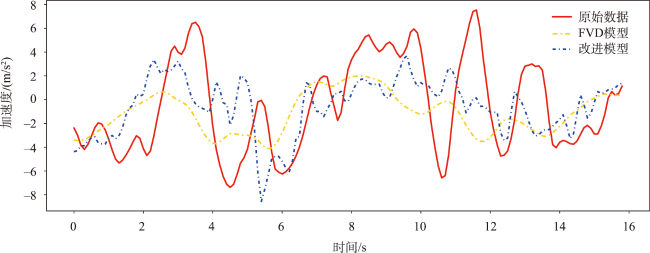
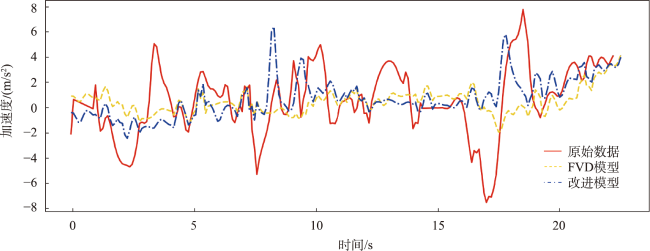
表8 FVD模型与改进模型的加速度仿真评价Tab. 8 Evaluation of simulated accelerations between FVD model and improved model |
| 评价指标 | FVD模型 | 考虑驾驶员驾驶风格的跟驰模型 |
|---|---|---|
| MAE/(m/s2) | 3.524 | 2.013 |
| MAPE/ % | 11.794 | 5.672 |
| RMSE/(m/s2) | 3.613 | 2.549 |
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
王涛, 高自友, 赵小梅. 多速度差模型及稳定性分析[J]. 物理学报, 2006, 55(2):634-640.
[
|
| [13] |
孙棣华, 张建厂, 赵敏, 等. 考虑后视效应和速度差信息的跟驰模型[J]. 四川大学学报(自然科学版), 2012, 49(1):115-120.
[
|
| [14] |
申勇, 马天奕, 李祥尘. 考虑速度对反应强度影响的车辆跟驰模型[J]. 交通运输工程与信息学报, 2019, 17(2):153-159.
[
|
| [15] |
|
| [16] |
|
| [17] |
潘义勇, 管星宇. 基于分位数回归的随机优化速度跟驰模型[J]. 浙江大学学报(工学版), 2022, 56(8):1553-1559.
[
|
| [18] |
U.S. Department of Transportation Federal Highway Administration. (2016). Next Generation Simulation (NGSIM) Vehicle Trajectories and Supporting Data. [Dataset]. Provided by ITS DataHub through Data. transportation.gov. Accessed 2022-10-10 from http://doi.org/10.21949/1504477.
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
王光, 林国宇. 改进的自适应参数DBSCAN聚类算法[J]. 计算机工程与应用, 2020, 56(14):45-51.
[
|
| [26] |
|
| [27] |
|
| [28] |
|
| [29] |
|
| [30] |
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}