
RUG:收益驱动的单向共享汽车用户重定位模型
|
马毓哲(1997— ),男,河南平顶山人,硕士生,主要研究方向为时空大数据。E-mail: a17603869707@163.com |
收稿日期: 2023-04-10
修回日期: 2023-09-07
网络出版日期: 2023-12-05
基金资助
国家自然科学基金项目(61976168)
国家自然科学基金项目(61972309)
国家自然科学基金项目(62272369)
陕西省自然科学基础研究计划资助项目(2023-JC-YB-558)
RUG: A Revenue-driven User-based Relocation Approach in One-way Car-sharing Incorporating Public Transportation
Received date: 2023-04-10
Revised date: 2023-09-07
Online published: 2023-12-05
Supported by
National Natural Science Foundation of China(61976168)
National Natural Science Foundation of China(61972309)
National Natural Science Foundation of China(62272369)
Natural Science Basic Research Program of Shaanxi(2023-JC-YB-558)
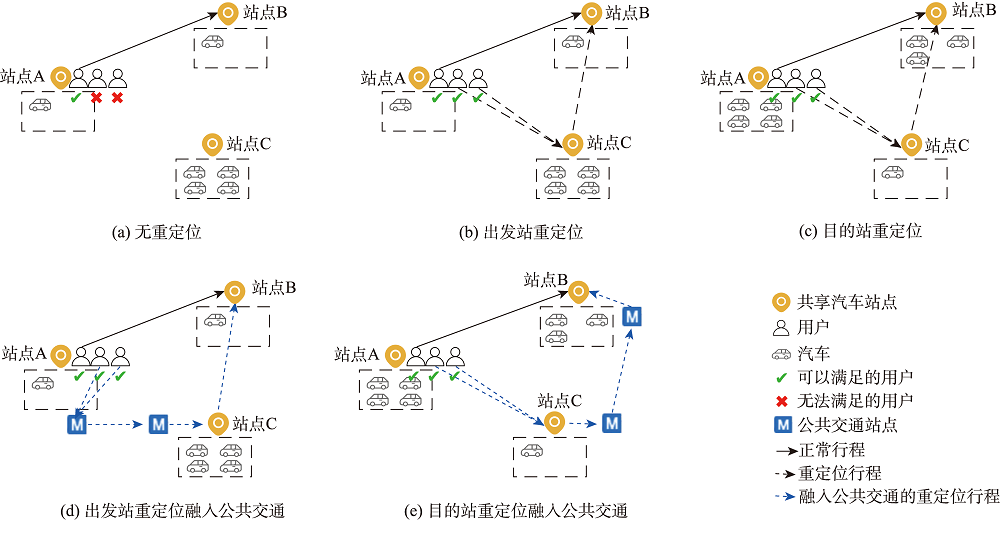
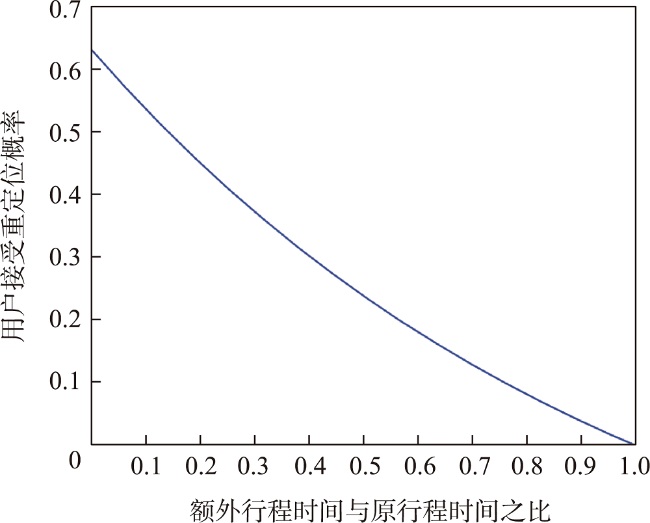
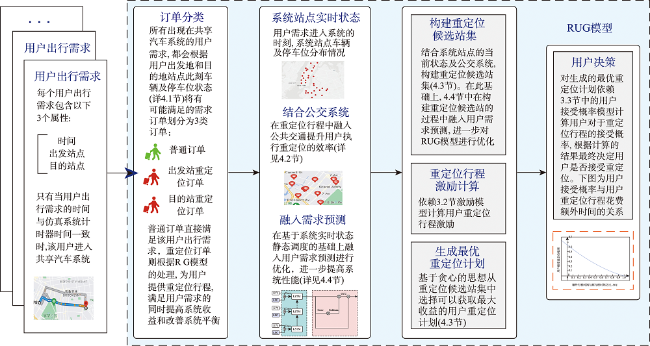
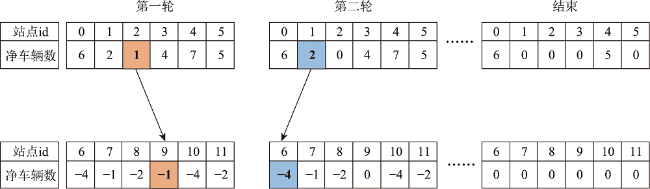
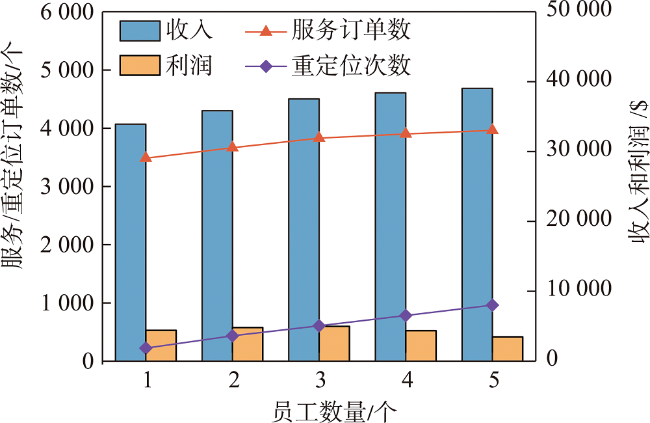
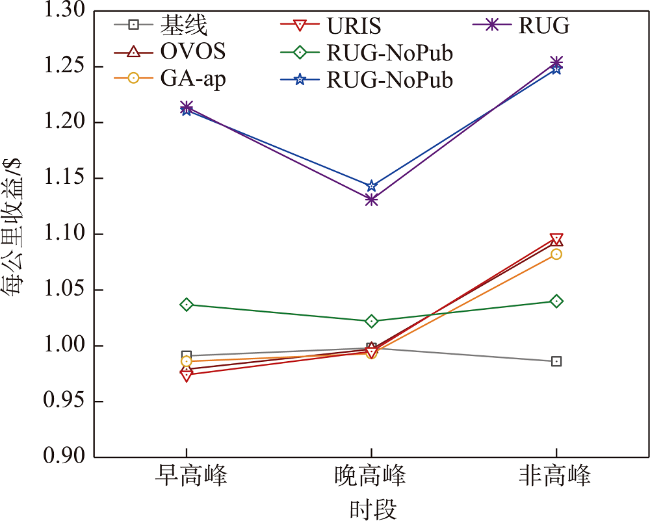
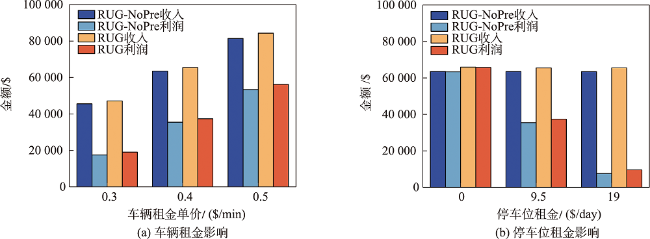
共享汽车在满足用户多样化出行需求的同时,有助缓解交通拥堵、降低污染,很多场景比出租车更为经济。单向共享汽车允许用户在系统内任意站点借车和还车,具备运营成本低、服务灵活的优势。然而,用户出行需求的时空偏态性会导致站点间车辆和需求不平衡,成为制约单向共享汽车企业盈利的关键问题。车辆调度能在一定程度上缓解上述问题,现有研究多数以期望收益最大化或降低系统不平衡性为目标构建优化模型。前者受限于出行需求预测精度不足,放弃当前订单而追求期望更高收入的模式难以保证实际收益;后者为满足系统平衡而付出更多调度成本会使系统盈利能力下降。为此,本文提出一种收益驱动并适用实时场景的单向共享汽车用户重定位模型RUG,基于前景理论的确定效应保证当前可获得收益,对于受系统资源限制无法满足的需求,通过为用户提供替代方案在尝试获取收益的同时,也能有效平衡系统车辆资源。通过设计合理的用户激励和接受度模型将用户作为重定位主体纳入系统,利用公共交通突破传统用户重定位车辆的距离局限,以贪心的最优化实现调度计算。在真实的纽约出行和共享汽车数据集上的实验结果表明, RUG模型相比现有用户重定位方法优势显著,在同样模型参数条件下,相比现有代表性基于用户调度方法,RUG在服务订单数和利润2个方面分别提高14%和60%,尤其提升了交通高峰期单位利润。通过加入出行需求预测,模型进一步增加5.4%收益的同时,还能有效改善用户服务水平和系统平衡性。
马毓哲 , 王蒙 , 李辉 , 崔江涛 , 刘俊华 , 李瑞蒙 . RUG:收益驱动的单向共享汽车用户重定位模型[J]. 地球信息科学学报, 2023 , 25(12) : 2315 -2328 . DOI: 10.12082/dqxxkx.2023.230280
Car-sharing services can meet the diverse travel needs of users while helping to alleviate traffic congestion and reduce pollution. In many scenarios, car-sharing is more economical than taxis. One-way car-sharing allows users to rent and return cars at any station within the system, which leads to low operating costs and flexible services. However, the spatiotemporal skewness of user travel demand gives rise to imbalances between vehicle supply and demand among stations, which limits the profitability of car-sharing companies. Relocating vehicles can alleviate the above problems to some extent. Most existing studies construct optimization models with the goal of maximizing expected revenue or reducing system imbalance. The former is limited by the insufficient accuracy of travel demand prediction, and the mode of discarding definite orders and pursuing higher possible expected benefits instead cannot guarantee actual profits. To improve system balance, the latter pays more relocation costs such that reduces the profitability. To this end, we propose a revenue-driven one-way car-sharing user relocation model RUG that is suitable for real-time scenarios. The model is based on the deterministic effect of prospect theory, which ensures the current definite gains. For orders that cannot be fulfilled due to imbalanced resources, RUG provides users with alternative travel routes, which not only attempts for promising gains but also effectively balances the system. Users are incorporated into the system as relocation subjects by designing rational user incentive and acceptance models. Public transportation is utilized to break through the distance limitations of user relocation. Relocation plans are evaluated with a greedy heuristic. Experimental results on real-world New York datasets show that the RUG model has significant advantages over existing user-based relocation methods. Under the same parameters, compared to the representative user-based relocation method, RUG increases service order volume and profit by 14% and 60%, respectively. Notably, RUG can effectively raise unit profits during traffic rush hours. By incorporating travel demand forecasting, the model further increases revenue by 5.4% while also improving user service level and system balance.
表1 不同方法的性能对比Tab. 1 Performance comparison between different methods |
| 服务订单数/个 | 收入/$ | 利润/$ | 重定位次数/次 | ||||
|---|---|---|---|---|---|---|---|
| OVOS | 3 831 | 37 516 | 4 985 | - | - | - | - |
| GA-ap | 3 469 | 34 007 | 4 683 | - | -9 | -9 | -6 |
| URIS | 6 495 | 51 589 | 23 516 | 3 022 | 70 | 38 | 372 |
| RUG | 7 458 | 65 481 | 37 399 | 2 807 | 95 | 75 | 650 |
注:加粗数值表示本文提出模型RUG的实验性能及对比结果。 |
表2 模型消融实验Tab. 2 Ablation Experiments |
| 服务订单数/个 | 收入/$ | 利润/$ | 重定位次数/次 | |
|---|---|---|---|---|
| URIS-NoPub | 3 442 | 32 112 | 4 122 | 1 490 |
| RUG-NoPub | 3 512 | 33 544 | 5 550 | 229 |
| RUG-NoPre | 7 136 | 63 554 | 35 480 | 2 822 |
| RUG | 7 458 | 65 481 | 37 399 | 2 807 |
注:加粗数值表示本文提出模型RUG的实验结果。 |
表3 额外时间影响Tab. 3 Effect of extra time cost |
| 额外时间 | 重定位 订单数/个 | 重定位 订单收入/$ | 平均收入/$ | |
|---|---|---|---|---|
| 短 | 46 | 437 | 9.50 | |
| RUG-NoPub | 中 | 139 | 731 | 5.25 |
| 长 | 44 | 126 | 2.86 | |
| 短 | 2 077 | 18 293 | 8.80 | |
| RUG-NoPre | 中 | 725 | 2 814 | 3.88 |
| 长 | 32 | 24 | 0.75 | |
| 短 | 1 825 | 16 203 | 8.88 | |
| RUG | 中 | 944 | 3 725 | 3.95 |
| 长 | 38 | 31 | 0.82 |
注:加粗数值表示3个模型在不同额外时间下重定位订单数、重定位订单收入及平均收入3个维度对比最好的结果。 |
表4 用户可接受的额外时间上限约束的影响Tab.4 Effect of extra time toplimit acceptable to users |
| 额外时间占比/% | 服务订单数/个 | 收入/$ | 利润/$ |
|---|---|---|---|
| 10 | 4 424 | 43 520 | 15 510 |
| 30 | 6 014 | 57 350 | 29 297 |
| 50 | 7 027 | 63 708 | 35 636 |
| 70 | 7 164 | 64 081 | 36 004 |
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}