
基于体素增长的机载LiDAR点云建筑物屋顶面分割
|
王竞雪(1981— ),女,辽宁兴城人,教授,博士生导师,主要研究方向为影像匹配、三维重建。E-mail: xiaoxue1861@163.com |
收稿日期: 2023-06-02
修回日期: 2023-09-26
网络出版日期: 2023-12-05
基金资助
国家自然科学基金面上项目(41871379)
辽宁省兴辽英才计划项目(XLYC2007026)
辽宁省应用基础研究计划项目(2022JH2/101300273)
Segmentation of Building Roofs from Airborne LiDAR Point Clouds Using Voxel-based Region Growing
Received date: 2023-06-02
Revised date: 2023-09-26
Online published: 2023-12-05
Supported by
National Natural Science Foundation of China(41871379)
Liaoning Revitalization Talents Program(XLYC2007026)
Fundamental Applied Research Foundation of Liaoning Province(2022JH2/101300273)
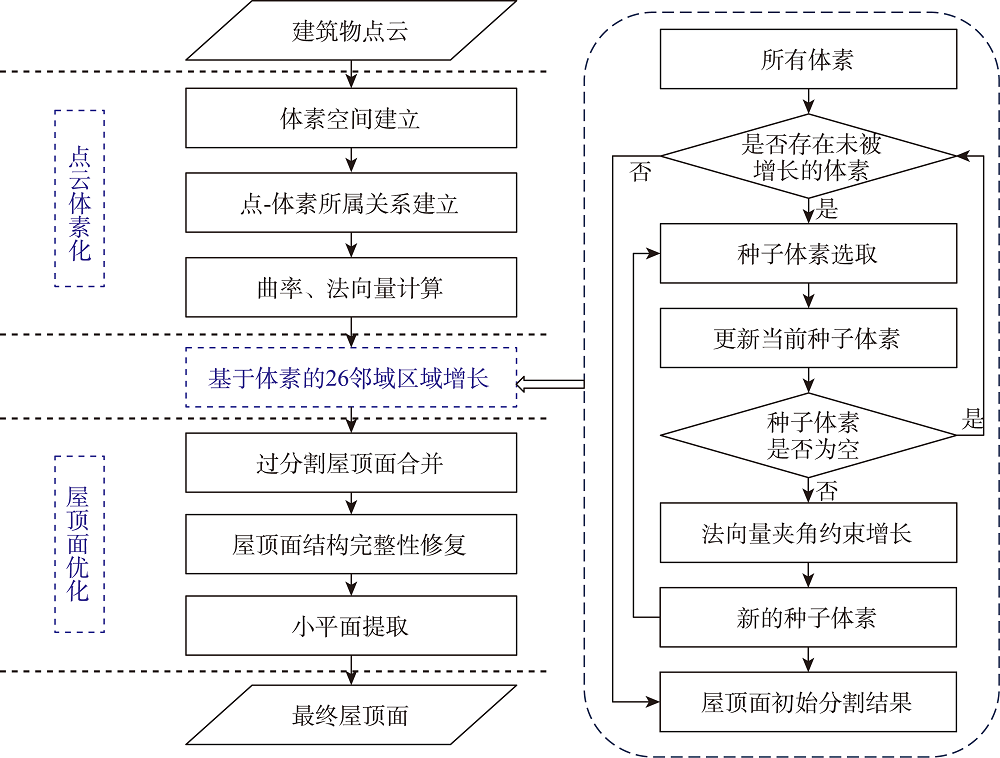
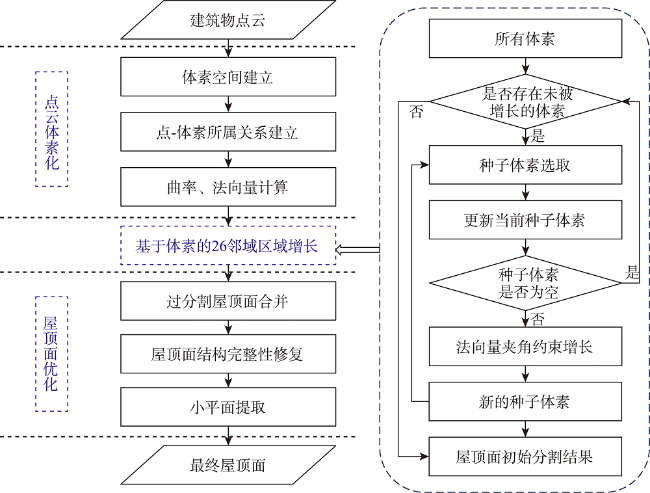
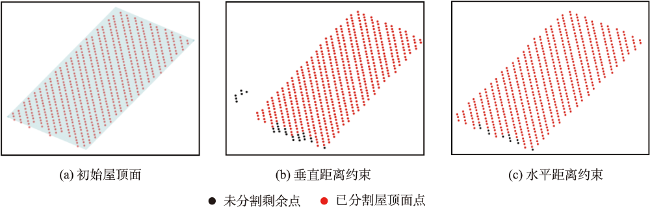
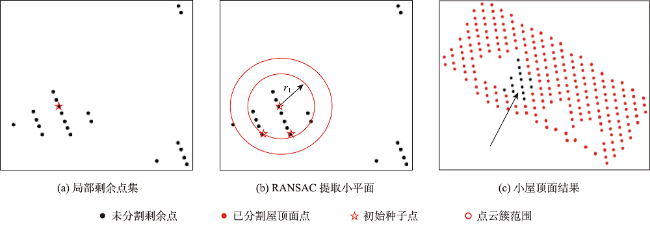
建筑物屋顶面的准确分割对建筑物模型重建具有重要意义。但是由于建筑物屋顶面的种类繁多、大小差异大、形状复杂等特点,以及机载LiDAR点云数据的密度不均、数据量大等特性,传统分割方法存在欠分割、过分割以及小平面难以准确分割等问题。针对上述问题,本文提出一种基于体素区域增长的机载LiDAR点云建筑物屋顶面分割方法,有效提升了复杂结构建筑物屋顶面的分割精度。首先,对点云数据进行体素化,根据PCA方法估计每个体素的法向量、曲率值。然后实现基于体素区域增长的初始屋顶面分割。该过程选取当前体素空间曲率最小值体素作为初始种子体素,以26邻域为增长方向,根据种子体素与待增长体素间的法向量夹角约束增长。迭代增长过程中根据当前种子体素与增长体素的曲率差绝对值确定待增长种子体素,直到未有新的种子体素出现停止增长。再次选择新的初始种子体素重复该过程,直到完成所有体素的分割。最后通过对初始分割结果中过分割屋顶面进行合并、屋顶面结构完整性修复、复杂建筑物的小平面提取等优化处理得到最终的屋顶面。本文选取ISPRS官网提供的Vaihingen和Toronto 2个地区的机载LiDAR点云数据,分别对其中代表性的单栋建筑物和区域建筑物进行屋顶面分割实验。结果表明,复杂建筑物屋顶面点云分割的完整率、正确率和分割质量结果分别为95.36%~99.58%、94.83%~100%和90.65%~98.28%。本文方法在解决欠分割和过分割问题的基础上,有效地提高了建筑物点云的屋顶面分割的精度。
王竞雪 , 蒋莹 , 王丽芹 . 基于体素增长的机载LiDAR点云建筑物屋顶面分割[J]. 地球信息科学学报, 2023 , 25(12) : 2468 -2486 . DOI: 10.12082/dqxxkx.2023.230305
Accurate segmentation of building roofs is important for 3D building model reconstruction. However, traditional segmentation methods have some problems such as under-segmentation, over-segmentation, and difficulty in accurately segmenting small surfaces due to the diverse and complex characteristics of building roofs such as varying sizes and shapes, as well as the properties of LiDAR point clouds such as uneven density and large amount of data. To address these problems, this paper proposes a building roof segmentation method using voxel-based region growing to improve the segmentation accuracy from airborne LiDAR point clouds. First, the voxel size is determined based on the density of points derived from the point clouds projected onto the xy-plane, and the voxelization of the point cloud is performed. Then, the normal vector and curvature of each voxel are estimated using the PCA method. This leads to the initial roof segmentation results based on voxel growing. During the segmentation process, the voxel with the minimum curvature value is selected as the initial seed voxel, and the surrounding 26-neighborhood voxels are assigned as the growing voxels. The growth is constrained by the angle of the normal vector between the seed voxel and the growing voxels. The new seed voxels to be grown are determined iteratively based on the absolute difference of the curvature values between the current seed voxel and the growing voxels. The growth continues until no new seed voxels appear. This process is repeated by selecting a new initial seed voxel until the segmentation of all voxels is completed. Finally, the final roof surface is obtained through optimization processes such as merging the over-segmented roof surface into the initial segmentation results, repairing the integrity of the roof surface, and extracting small surfaces for complicated buildings. In this paper, airborne LiDAR point cloud data from two regions, i.e., Vaihingen and Toronto, provided by ISPRS official website, are selected to perform roof segmentation experiments of single buildings and building areas. The results show that the completeness, accuracy, and quality of the point cloud segmentation of complicated building roofs are 95.36%~99.58%, 94.83%~100%, and 90.65%~98.28%, respectively. The proposed method can effectively improve the accuracy of roof segmentation based on LiDAR point clouds without under-segmentation and over-segmentation problems, which provides reliable basic data for the automatic construction of 3D building models based on LiDAR data.
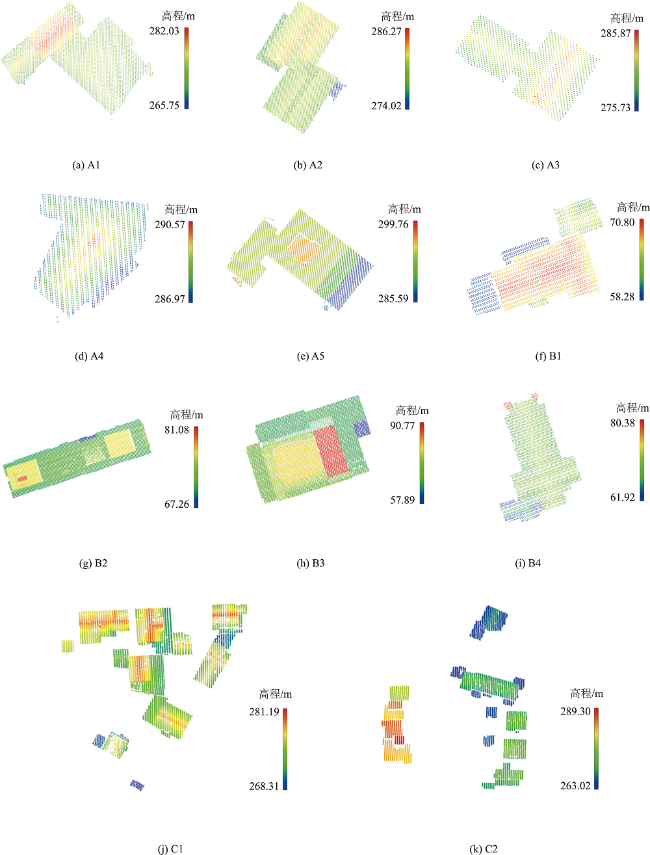
表1 实验数据基本信息Tab. 1 Basic information of experimental data |
| 数据地区 | 序号 | 包含屋顶面片数/个 | 特点 |
|---|---|---|---|
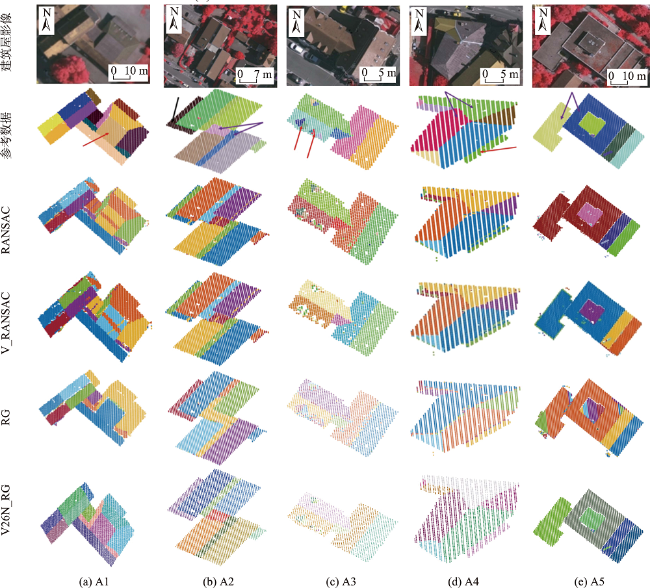
| Vaihingen | A1 | 14 | 屋顶面之间拓扑关系复杂、大小差异大 |
| A2 | 9 | 包含一个过渡平缓的屋顶面 | |
| A3 | 13 | 包含多个小屋顶面,屋顶面的大小差异较大 | |
| A4 | 8 | 屋顶面较平缓不易区分,包含小屋顶面 | |
| A5 | 7 | 包含两个小屋顶面、噪声点多 | |
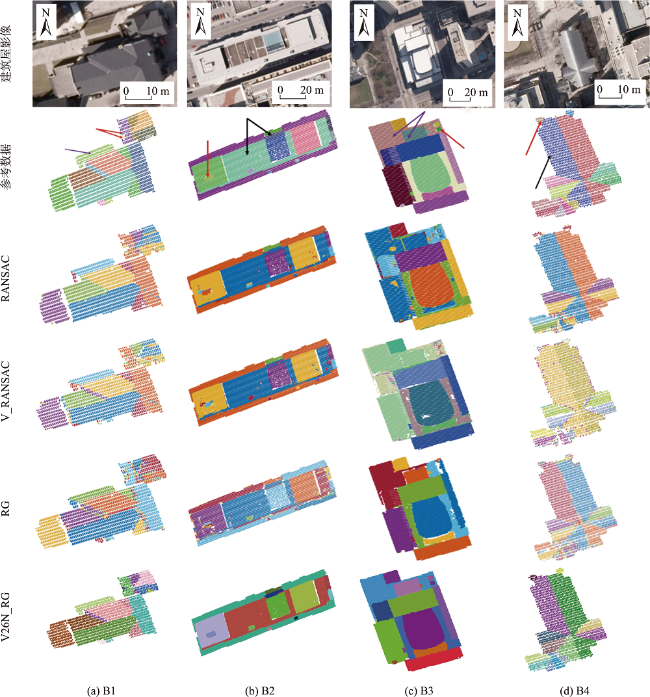
| Toronto | B1 | 19 | 屋顶面之间的拓扑关系复杂,存在多个小平面 |
| B2 | 13 | 屋顶面形状多样,拓扑关系复杂 | |
| B3 | 15 | 屋顶面间高度差较大,但形状复杂多样 | |
| B4 | 15 | 屋顶面间过渡平缓,大小差异较大 | |
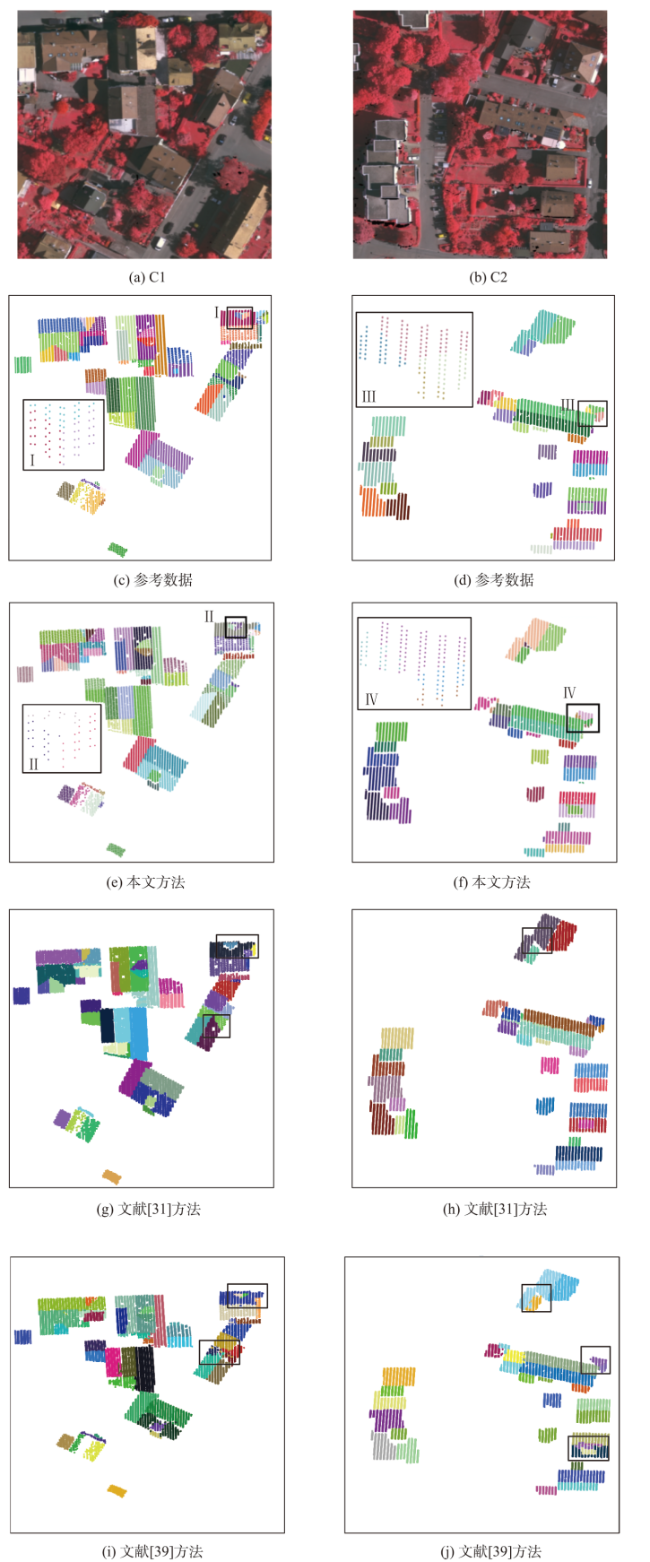
| Vaihingen | C1 | 62 | 屋顶面复杂多样,点云密度不均匀 |
| C2 | 40 | 屋顶面之间的拓扑关系复杂,包含多个小平面 |
表2 不同方法的参数设置Tab. 2 Parameter settings for different methods |
| 方法 | 参数设置 |
|---|---|
| RANSAC | 点到面距离0.1 m,迭代次数200,最少点个数3 |
| V_RANSAC | 特征值比值0.04,循环次数1 000,最少点个数10,点到面的距离0.1,计算法向量所需的邻域点个数8 |
| RG | 曲率差值0.05,法向量夹角10°,计算法向量所需的邻域点个数8,增长方式为8邻近点,构面的最少点数20 |
| V26N_RG | 体素的大小根据点云密度设置,计算法向量所需的邻域体素个数8,法向量夹角5°,增长方式为26邻域 |
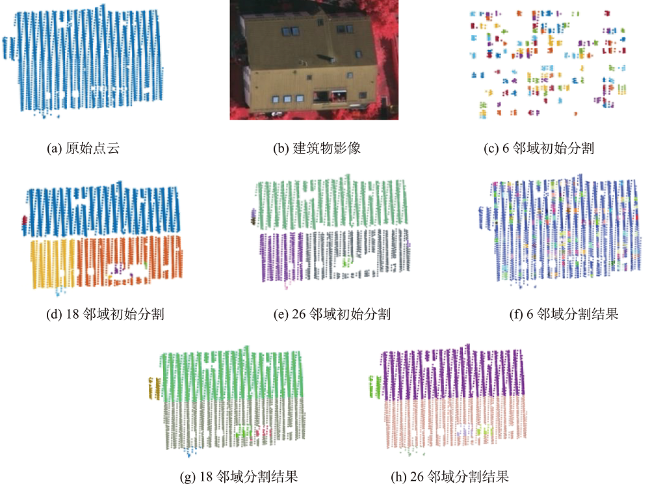
表3 基于不同邻域体素的分割结果统计Tab. 3 Statistics of point cloud segmentation results based on different neighborhood voxels |
| 邻域 | Comp /% | Corr /% | Quality /% | Time /s |
|---|---|---|---|---|
| 18 | 98.93 | 99.32 | 98.26 | 6.25 |
| 26 | 98.98 | 99.41 | 98.41 | 5.57 |
图11 不同方法对Vaihingen地区A1—A5单栋建筑物屋顶面分割结果Fig. 11 Segmentation results of different methods for roof surface of A1-A5 single building in Vaihingen |
表4 单栋建筑物屋顶面分割结果精度统计Tab. 4 Accuracy statistics of the segmentation results of roof surface of single building (%) |
| 方法 | 精度指标 | A1 | A2 | A3 | A4 | A5 | B1 | B2 | B3 | B4 |
|---|---|---|---|---|---|---|---|---|---|---|
| RANSAC | Comp | 88.98 | 96.23 | 94.58 | 92.74 | 98.34 | 90.35 | 93.44 | 93.91 | 90.40 |
| V_RANSAC | 88.87 | 95.84 | 93.83 | 91.80 | 98.09 | 89.05 | 94.59 | 86.86 | 85.50 | |
| RG | 93.11 | 98.82 | 81.40 | 89.32 | 98.43 | 84.92 | 88.26 | 93.34 | 79.38 | |
| V26N_RG | 97.15 | 99.10 | 95.78 | 95.36 | 99.58 | 97.08 | 98.55 | 98.73 | 96.06 | |
| RANSAC | Corr | 90.71 | 97.61 | 95.98 | 92.14 | 99.08 | 94.51 | 92.06 | 90.83 | 91.89 |
| V_RANSAC | 90.53 | 96.84 | 97.19 | 92.06 | 95.18 | 91.12 | 95.76 | 94.35 | 90.39 | |
| RG | 91.78 | 98.32 | 96.69 | 96.61 | 91.65 | 84.06 | 92.06 | 99.53 | 79.18 | |
| V26N_RG | 97.19 | 99.10 | 98.00 | 94.83 | 97.81 | 97.48 | 99.72 | 99.44 | 96.48 | |
| RANSAC | Quality | 83.00 | 94.01 | 90.95 | 85.94 | 97.44 | 85.85 | 86.47 | 85.78 | 82.49 |
| V_RANSAC | 81.31 | 92.93 | 91.35 | 85.07 | 93.45 | 81.94 | 90.79 | 82.57 | 78.37 | |
| RG | 85.98 | 97.22 | 79.19 | 86.60 | 90.50 | 73.14 | 82.01 | 92.94 | 65.67 | |
| V26N_RG | 94.49 | 98.22 | 93.94 | 90.65 | 97.41 | 94.70 | 98.28 | 98.19 | 92.81 |
表5 不同方法对区域建筑物屋顶面分割结果精度统计Tab. 5 Accuracy statistics of the segmentation results of roof surface in building area by different methods (%) |
| 方法 | Comp | Corr | Quality | |||||
|---|---|---|---|---|---|---|---|---|
| C1 | C2 | C1 | C2 | C1 | C2 | |||
| 文献[31]方法 | 92.59 | 91.67 | 86.21 | 89.19 | 80.65 | 82.50 | ||
| 文献[39]方法 | 80.70 | 84.21 | 90.20 | 94.12 | 74.19 | 80.00 | ||
| 文献[44]方法 | 95.24 | 100.00 | 90.91 | 97.56 | 86.96 | 97.56 | ||
| 文献[45]方法 | 90.48 | 95.00 | 71.25 | 86.36 | 66.28 | 82.61 | ||
| 文献[46]方法 | 92.06 | 97.50 | 79.45 | 78.00 | 74.36 | 76.47 | ||
| 文献[47]方法 | 96.83 | 97.50 | 81.33 | 92.86 | 79.22 | 90.70 | ||
| 本文方法 | 98.41 | 97.50 | 98.10 | 100.00 | 96.87 | 97.50 | ||
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
张文元, 陈江媛, 谈国新. 基于3D基元拟合的复杂屋顶点云三维重建[J]. 地球信息科学学报, 2023, 25(8):1531-1545.
[
|
| [5] |
周嘉俊, 李勇, 何明, 等. 机载激光雷达点云多层次建筑物的三维重建[J]. 遥感信息, 2019, 34(5):76-80.
[
|
| [6] |
|
| [7] |
|
| [8] |
赵传, 张保明, 陈小卫, 等. 一种利用点云邻域信息的建筑物屋顶面高精度自动提取方法[J]. 测绘学报, 2017 46(9):1123-1134.
[
|
| [9] |
|
| [10] |
胡伟, 卢小平, 李珵, 等. 基于改进RANSAC算法的屋顶激光点云面片分割方法[J]. 测绘通报, 2012(11):31-34,46.
[
|
| [11] |
|
| [12] |
|
| [13] |
徐景中, 李均. 复杂屋顶平面的RANSAC优化分割方法[J]. 武汉大学学报·信息科学版, 2023, 48(9):1531-1537.
[
|
| [14] |
康传利, 兰猗令, 王宁, 等. 一种结合SIFT与3D Hough变换的建筑物屋顶点云分割方法[J]. 遥感信息, 2022, 37(5):31-37.
[
|
| [15] |
刘亚坤, 李永强, 刘会云, 等. 基于改进RANSAC算法的复杂建筑物屋顶点云分割[J]. 地球信息科学学报, 2021, 23(8):1497-1507.
[
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
|
| [29] |
|
| [30] |
朱军桃, 王雷, 赵传, 等. 基于区域生长算法的复杂建筑物屋顶点云分割[J]. 国土资源遥感, 2019, 31(4):20-25.
[
|
| [31] |
张建伟, 权庆乐. 一种融合区域生长和RANSAC的稠密点云平面分割方法[J]. 西安科技大学学报, 2022, 42(2):341-348.
[
|
| [32] |
赵传, 郭海涛, 卢俊, 等. 结合区域增长与RANSAC的机载LiDAR点云屋顶面分割[J]. 测绘学报, 2021, 50(5):621-633.
[
|
| [33] |
|
| [34] |
|
| [35] |
|
| [36] |
|
| [37] |
|
| [38] |
李明磊, 李广云, 王力, 等. 采用八叉树体素生长的点云平面提取[J]. 光学精密工程, 2018, 26(1):172-183.
[
|
| [39] |
|
| [40] |
|
| [41] |
|
| [42] |
ISPRS. ISPRS test project on urban classification and 3D building reconstruction[DB/OL]. (2016-8-13) [2020-06-10]. http://www2.isprs.org/commissions/comm3/wg4/detection-and-reconstruction.html
|
| [43] |
|
| [44] |
|
| [45] |
|
| [46] |
|
| [47] |
|
/
| 〈 |
|
〉 |



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}