
复杂场景下小农经营区地块级苹果园模块化制图方法框架
|
寇雯齐(2000— ),女,新疆哈密人,硕士生,主要从事遥感信息提取研究。E-mail: 2018321010229@cau.edu.cn |
Copy editor: 蒋树芳
收稿日期: 2022-04-05
修回日期: 2022-05-03
网络出版日期: 2024-03-26
基金资助
国家重点研发计划项目(2021YFC1523503)
国家自然科学基金项目(41971375)
新疆第三次科学考察项目(2021xjkk1403)
Modular Mapping Framework of Parcel-Level Apple Orchards in Smallholder Agriculture Areas under Complex Scenes
Received date: 2022-04-05
Revised date: 2022-05-03
Online published: 2024-03-26
Supported by
National Key Research and Development Program of China(2021YFC1523503)
National Natural Science Foundation of China(41971375)
The Third Comprehensive Scientific Expedition to Xinjiang(2021xjkk1403)
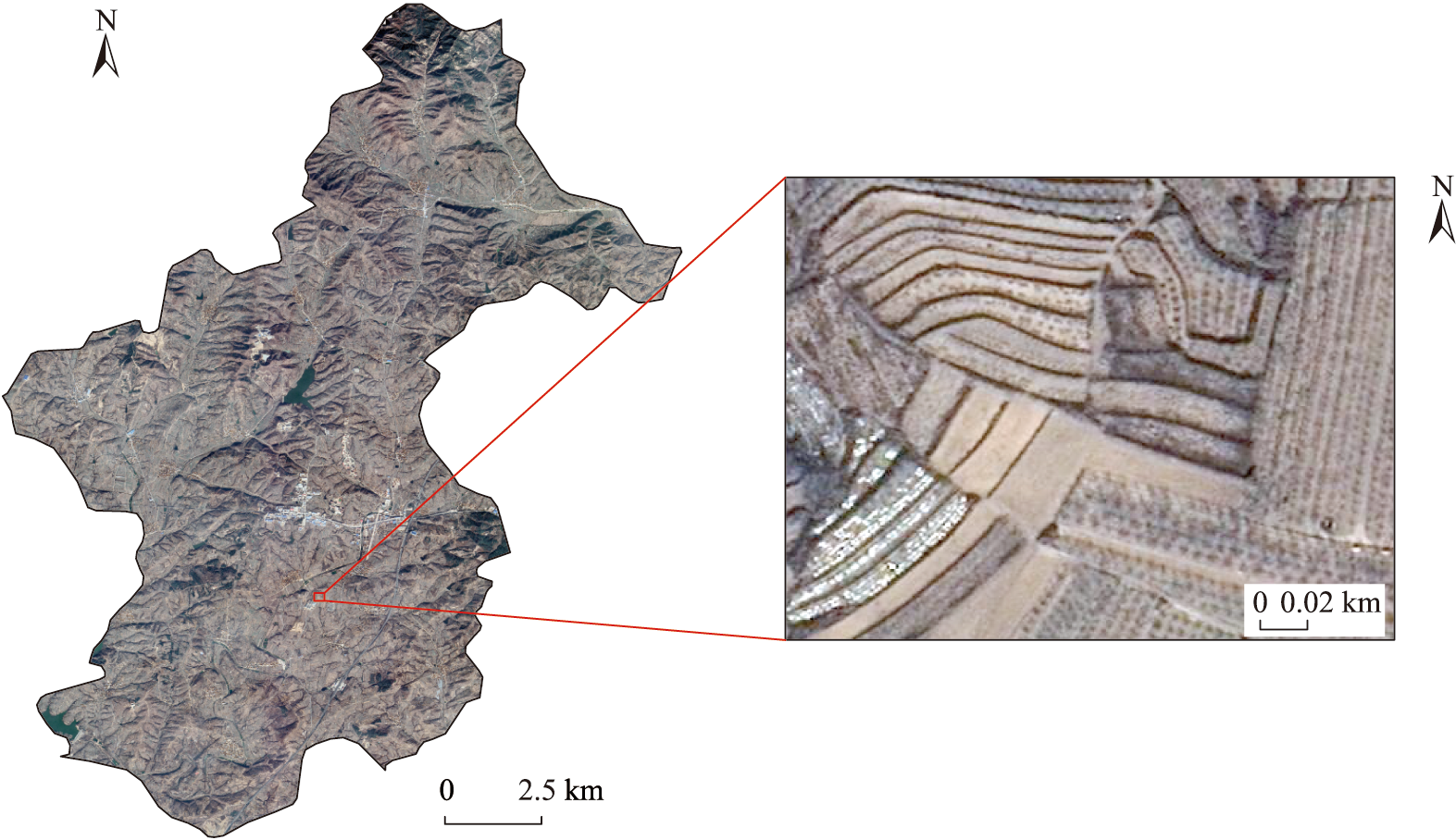
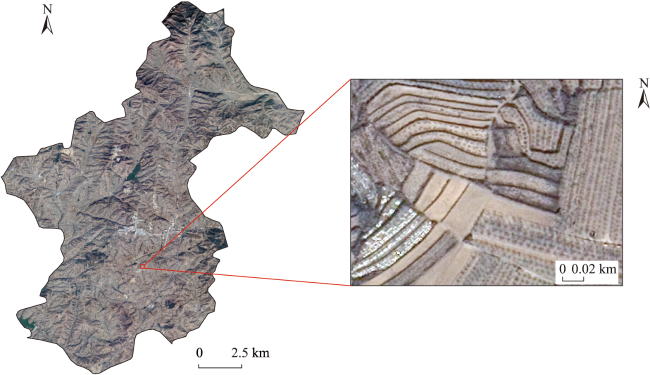
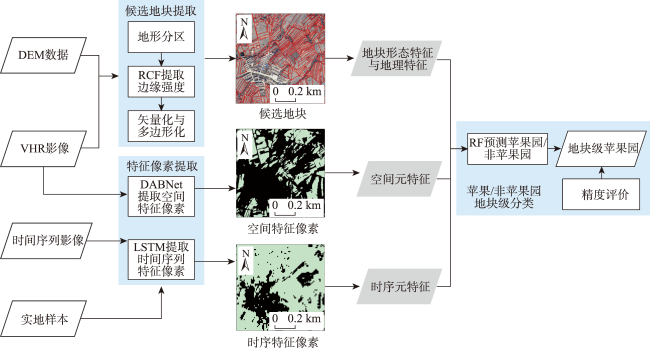
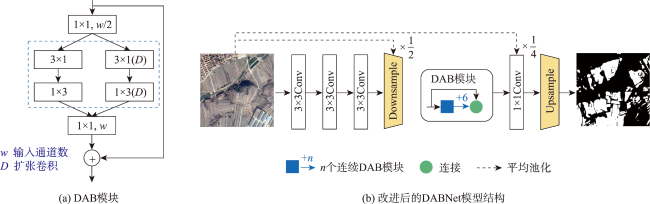
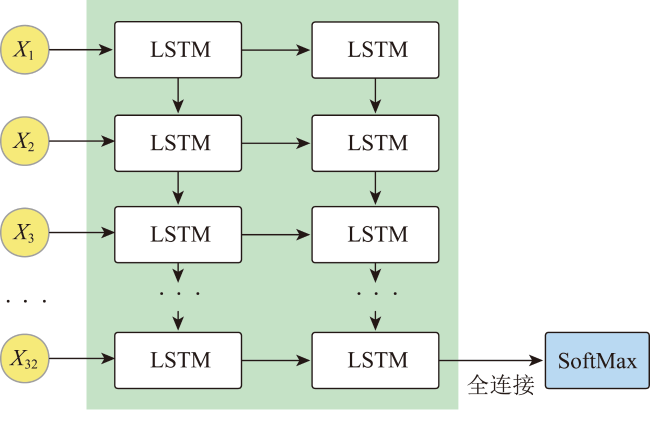
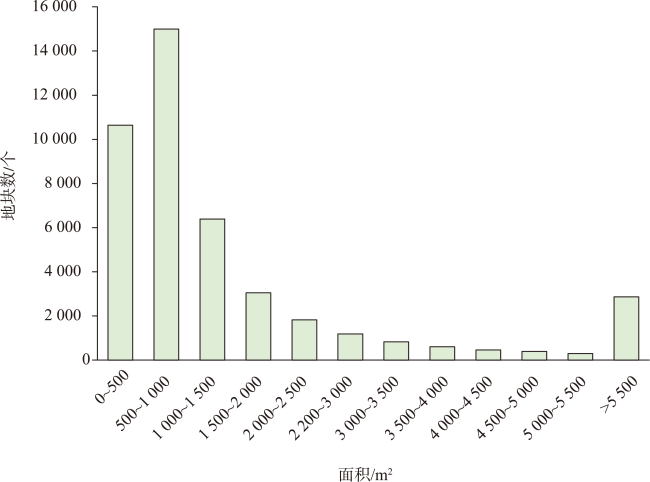
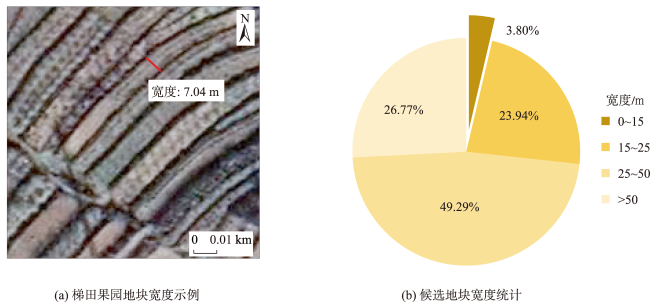
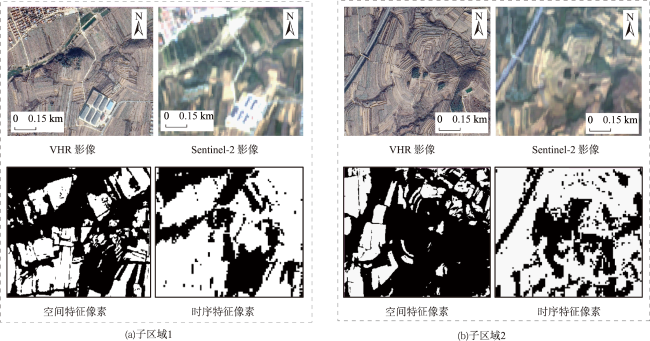
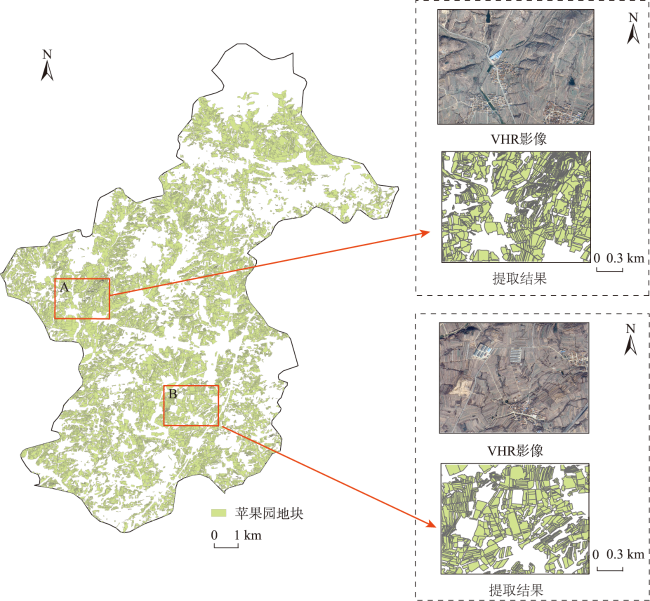
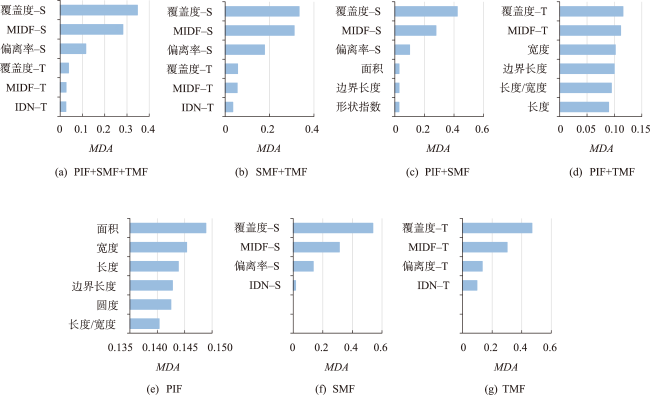
实现复杂场景下地块级苹果园的精准制图,是中国苹果产业精细化管理面临的迫切需求。然而,传统的地块级分类制图框架在处理小农经营区内的大量细碎地块时,可靠性大幅度降低。本文提出一种适用于复杂场景下小农经营区的地块级苹果园模块化制图方法框架。① 基于模拟人类对目标场景视觉感知的分层策略,从深秋季的单幅超高空间分辨率(Very High Resolution, VHR)影像中提取冗余的候选地块;② 利用非对称瓶颈网络(Depth-wise Asymmetric Bottleneck Network, DABNet)模型与长短期记忆(Long Short-Term Memory, LSTM)模型,分别从VHR影像与时间序列影像中提取苹果园的空间特征像素与时序特征像素。然后,构建元特征描述特征像素在候选地块中的分布情况,与地块的内在特征共同组成苹果园地块的分类特征;③ 使用随机森林(Random Forest, RF)将候选地块分类为苹果园地块和非苹果园地块。以山东省栖霞市西城镇为研究区,从43 238个候选地块中提取出30 292个苹果园地块,分类总体精度达到92.7%。利用RF算法自带的平均精度减少指标(Mean Decrease in Accuracy, MDA)对17种分类子特征进行特征重要性分析,证明本文提出的元特征比传统人工设计特征具有更强的信息抽象与特征表达能力。该框架成功实现场景复杂的小农经营区地块级苹果园制图,可推进精准果园农业的发展。
寇雯齐 , 沈占锋 , 王浩宇 , 李硕 , 焦淑慧 , 雷雅婷 . 复杂场景下小农经营区地块级苹果园模块化制图方法框架[J]. 地球信息科学学报, 2024 , 26(1) : 197 -211 . DOI: 10.12082/dqxxkx.2024.220153
Accurate parcel-level mapping of apple orchards in complex scenes is an urgent need for refined management of China's apple industry. However, the traditional parcel-level classification mapping framework is substantially less reliable when dealing with a large number of fragment and small parcels in smallholder management areas. In this paper, a modular parcel-level mapping framework of apple orchard was proposed, which was suitable for smallholder management areas under complex scenes. First, the hierarchical strategy which simulates human visual perception was used to extract redundant candidate parcels from a single Very High spatial Resolution (VHR) image in deep fall. Second, we used the Depth-wise Asymmetric Bottleneck Network (DABNet) to extract spatial feature pixels from a VHR image and used the Long Short Term Memory (LSTM) to extract time series feature pixels from optical time series images. Then, meta-features were constructed to describe the distribution of feature pixels extraction results within the parcel,which together with the parcel intrinsic features formed the classification feature of the apple orchard parcels. Third, the Random Forest (RF)algorithm was used to classify the candidate parcels into apple orchard parcels and non-apple orchard parcels. An experiment was carried out in the Xicheng Town, southwest of Qixia City, Shandong Province, China. 30 292 apple orchard parcels were extracted from 43 238 candidate parcels, and the Overall Accuracy (OA) turned out to be 92.7%. Using the Mean Decrease in Accuracy (MDA) of RF algorithm to analyze the importance of 17 classification features, it was proved that the proposed meta-features had stronger spatial information description ability and feature expression ability than traditional features. This framework successfully realizes parcel-level mapping of apple orchards in smallholder agriculture areas under complex scenes, which can promote the development of precision orchard agriculture.
表1 Sentinel-2影像获取时间Tab. 1 The Sentinel-2 dataset used in this study |
| 获取时间 | 儒略日/d | 获取时间 | 儒略日/d |
|---|---|---|---|
| 2019-01-02 | 2 | 2019-08-22 | 234 |
| 2019-01-22 | 22 | 2019-09-14 | 257 |
| 2019-02-16 | 47 | 2019-09-24 | 267 |
| 2019-03-15 | 74 | 2019-10-19 | 292 |
| 2019-04-04 | 94 | 2019-10-31 | 304 |
| 2019-04-17 | 107 | 2019-11-08 | 312 |
| 2019-05-02 | 122 | 2019-11-18 | 322 |
| 2019-05-14 | 134 | 2019-12-03 | 337 |
| 2019-06-18 | 169 | 2019-12-28 | 362 |
表2 西城镇不同地形上的苹果园特征Tab. 2 Characteristics of different apple orchard parcels in Xicheng |
| 地形区 | 苹果园类型 | 代表性样本 | 特征 |
|---|---|---|---|
| 平原地区 | 平原果园 | 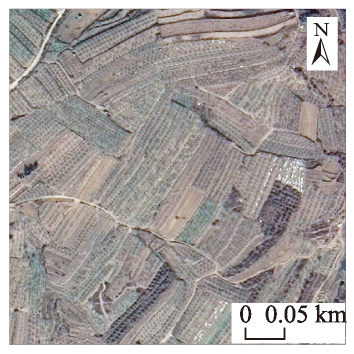 | 边界相对清晰,颗粒状纹理,空间分布整齐。 |
| 育苗果园 |  | 边界相对清晰,条状纹理紧凑,空间分布整齐。 | |
| 丘陵地区 | 梯田果园 |  | 边界粗糙而清晰,纹理颗粒状,空间分布密集。 |
| 山区 | 林地果园 | 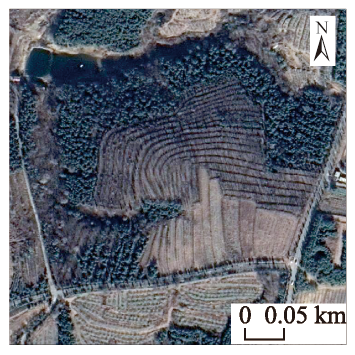 | 内部边界类似于梯田果园,但外部边界是模糊的,并与林地混合。 |
| 平原地区、丘陵地区、山区 | 反光膜果园 |  | 独特的内部白色纹理,存在于所有地形。 |
表3 用于地块分类的特征及计算方法Tab. 3 Features used for parcel classification |
| 类别1 | 类别2 | 特征名称 | 特征描述 | 公式编号 |
|---|---|---|---|---|
| 地块内在特征(PIF) | 形态特征 | 面积 | - | |
| 边界长度 | 地块的外边缘长度(不包括内岛) | |||
| 长度 | 地块包围盒的长边 | |||
| 宽度 | 地块包围盒的短边 | |||
| 长度/宽度 | ||||
| 圆度 | ||||
| 形状指数 | ||||
| 地理特征 | 海拔 | - | ||
| 坡度 | ||||
| 元特征 | 空间元特征(SMF) | 覆盖度-S | (2) | |
| 偏离率-S | (3) | |||
| MIDF-S | MIDF= | (4) | ||
| IDN-S | IDN=NUMBER(IFD) | (5) | ||
| 时序元特征(TMF) | 覆盖度-T | 公式同上 | ||
| 偏离率-T | ||||
| MIDF-T | ||||
| IDN-T |
注:AREA(x)代表返回x的面积;AREA(apple orchard)代表返回地块内苹果园像素的面积;n为IFD的个数;w为面积加权系数;DISTANCE(x, y)代表返回x和y之间距离;cp是地块的质心;cIFD是IFD的质心;MAX(x)代表返回x所包含元素最大值;SUM(x)代表返回x所包含元素的和;NUMBER(x)代表返回x所包含元素个数。 |
表4 基于不同特征组合的分类精度Tab. 4 Classification performance using different feature combinations |
| 特征组合 | 苹果园地块 | 非苹果园地块 | 总体精度OA/% | |||||
|---|---|---|---|---|---|---|---|---|
| PA | UA | F1-Score | PA | UA | F1-Score | |||
| PIF | 0.722 | 0.889 | 0.797 | 0.440 | 0.202 | 0.277 | 68.3 | |
| SMF | 0.916 | 0.889 | 0.902 | 0.746 | 0.800 | 0.772 | 86.3 | |
| TMF | 0.772 | 0.853 | 0.810 | 0.464 | 0.336 | 0.390 | 71.0 | |
| PIF+SMF | 0.928 | 0.901 | 0.914 | 0.758 | 0.816 | 0.786 | 87.8 | |
| PIF+TMF | 0.782 | 0.911 | 0.836 | 0.556 | 0.294 | 0.385 | 74.1 | |
| SMF+TMF | 0.942 | 0.926 | 0.934 | 0.883 | 0.907 | 0.895 | 91.8 | |
| PIF+SMF+TMF | 0.951 | 0.937 | 0.944 | 0.883 | 0.908 | 0.895 | 92.7 | |
| [1] |
|
| [2] |
原兴照. 烟台栖霞苹果规范化种植技术要点及前景分析[J]. 种子科技, 2021, 39(18):44-45.
[
|
| [3] |
杜鹰. 小农生产与农业现代化[J]. 中国农村经济, 2018,10:2-6.
[
|
| [4] |
|
| [5] |
蒙继华, 吴炳方, 杜鑫, 等. 遥感在精准农业中的应用进展及展望[J]. 国土资源遥感, 2011, 23(3):1-7.
[
|
| [6] |
|
| [7] |
张兵. 光学遥感信息技术与应用研究综述[J]. 南京信息工程大学学报:自然科学版, 2018, 10(1):1-5.
[
|
| [8] |
张鹏, 胡守庚. 地块尺度的复杂种植区作物遥感精细分类[J]. 农业工程学报, 2019, 35(21):125-134.
[
|
| [9] |
|
| [10] |
王刚, 王加胜, 苗旺元, 等. 基于Landsat 8 OLI影像的山区园地提取方法[J]. 现代计算机, 2021,10:116-122.
[
|
| [11] |
徐晗泽宇, 刘冲, 王军邦, 等. Google Earth Engine平台支持下的赣南柑橘果园遥感提取研究[J]. 地球信息科学学报, 2018, 20(3):396-404.
[
|
| [12] |
|
| [13] |
王刚. 基于Landsat遥感图像的山地丘陵区果园识别与监测——以昭通市为例[D]. 云南: 云南师范大学, 2021.
|
| [14] |
杨颖频, 吴志峰, 骆剑承, 等. 时空协同的地块尺度作物分布遥感提取[J]. 农业工程学报, 2021, 37(7):166-174.
[
|
| [15] |
邓刘洋, 沈占锋, 柯映明, 等. 基于地块尺度多时相遥感影像的冬小麦种植面积提取[J]. 农业工程学报, 2018, 34(21):157-164.
[
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
李森, 彭玲, 胡媛, 等. 基于FD-RCF的高分辨率遥感影像耕地边缘检测[J], 2020, 37(4):483-489
[
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
郭逸飞, 吴田军, 骆剑承, 等. 基于不确定性迭代优化的山地植被遥感制图[J]. 地球信息科学学报, 2022, 24(7):1406-1419.
[
|
| [27] |
吴志峰, 骆剑承, 孙营伟, 等. 时空协同的精准农业遥感研究[J]. 地球信息科学学报, 2020, 22(4):731-742.
[
|
| [28] |
|
| [29] |
|
| [30] |
|
| [31] |
|
| [32] |
|
| [33] |
|
| [34] |
|
| [35] |
|
| [36] |
|
| [37] |
|
| [38] |
|
| [39] |
|
| [40] |
解毅, 张永清, 荀兰, 等. 基于多源遥感数据融合和LSTM算法的作物分类研究[J]. 农业工程学报, 2019, 35(15):129-137.
[
|
| [41] |
林蕾. 基于循环神经网络模型的遥感影像时间序列分类及变化检测方法研究[D]. 北京: 中国科学院大学, 2018.
[
|
| [42] |
|
| [43] |
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}