
机器地图及其概念模型
|
游 雄(1962— ),男,博士生导师,教授,主要从事地图学、作战环境学研究。 E-mail: youarexiong@163.com |
Copy editor: 蒋树芳
收稿日期: 2022-10-27
修回日期: 2023-01-08
网络出版日期: 2024-03-26
基金资助
国家自然科学基金项目(42130112)
国家自然科学基金项目(42271464)
The Machine Map and its Conceptual Model
Received date: 2022-10-27
Revised date: 2023-01-08
Online published: 2024-03-26
Supported by
National Natural Science Foundation of China(42130112)
National Natural Science Foundation of China(42271464)
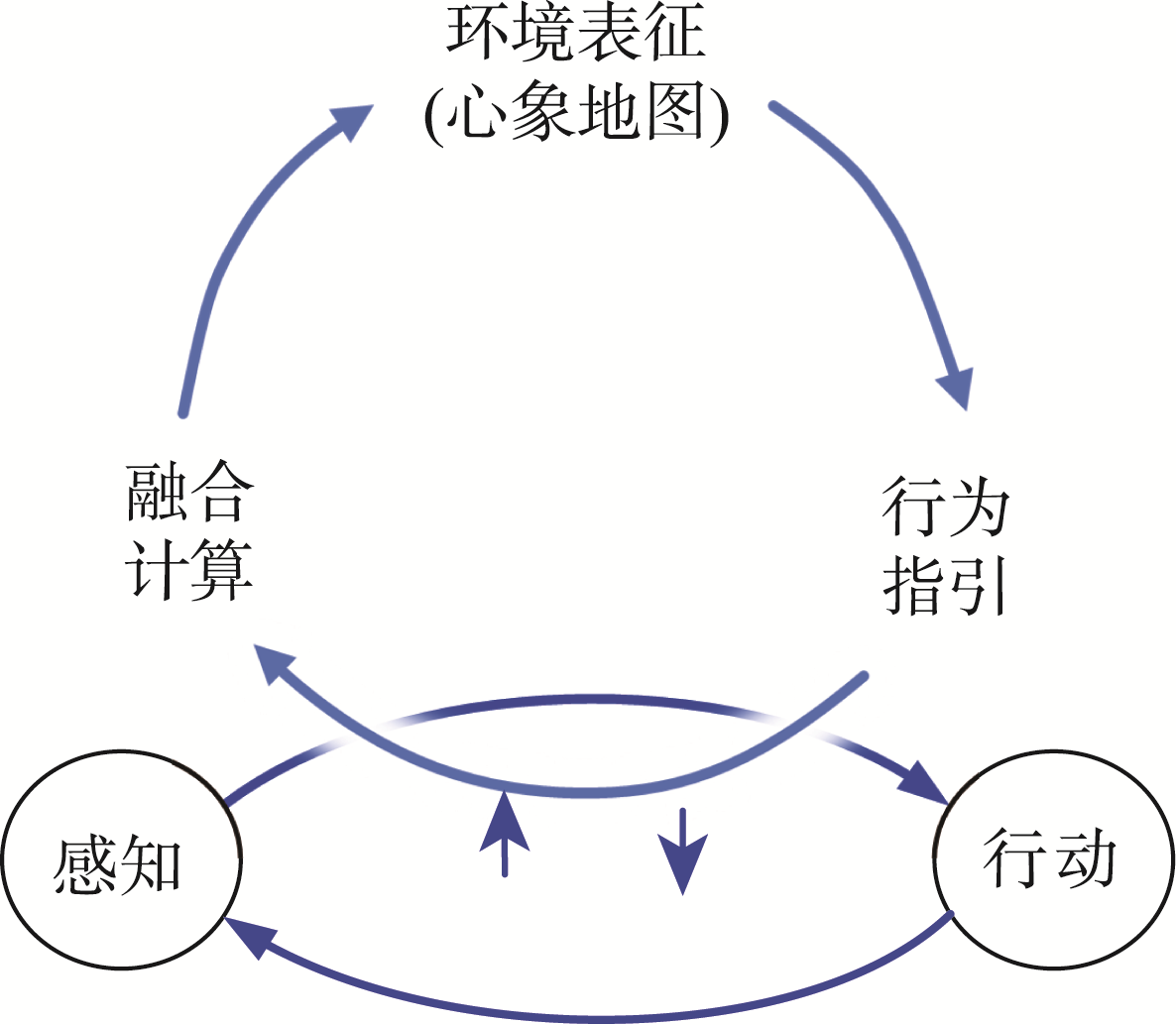
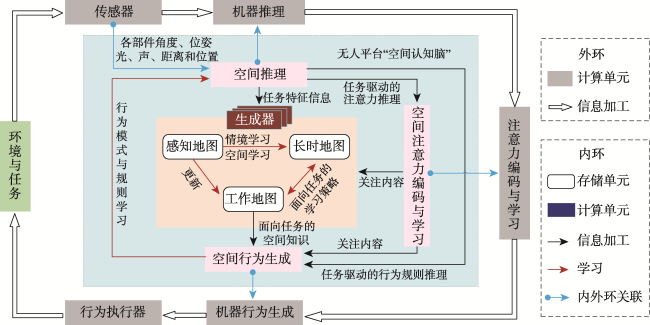
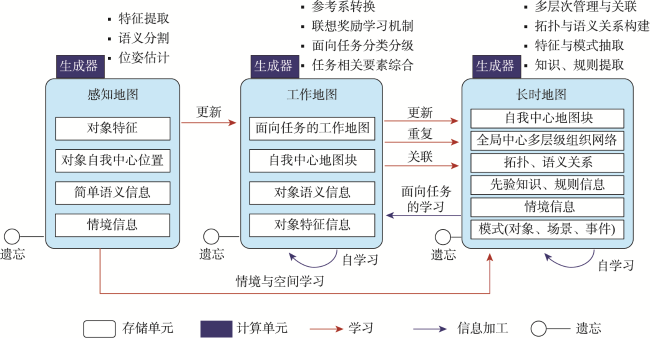
无人平台对复杂环境的自主认知能力是制约其广泛应用的关键问题,已成为当前地图学、人工智能、机器人等领域的研究热点。本文基于地图学的视角,交叉融合人工智能、机器人和认知科学的相关研究思路与成果,借鉴心象地图的作用功能,提出适用于无人平台认知环境的新型地图——机器地图,并对其特征进行了分析。类比心象地图的构建与运用机制,结合人工认知系统的设计决策点和核心认知能力,给出了机器地图概念模型的设计原则,提出“两环三图”的概念模型。该模型说明了机器地图与无人平台的内在联系,并勾勒出机器地图的功能部件与运行逻辑,为开展机器地图研究提供顶层框架和理论指导;类比心象地图的结构组成,提出了包含感知地图、工作地图和长时地图的机器地图逻辑构成,并分析了3类地图的内容与转化关系。在结论部分指出了机器地图的双向促进研究路线。机器地图的研究,能够提升无人自主平台对于复杂环境的认知和学习能力,也为智能时代地图学的发展探索新路径,具有十分重要的意义。
游雄 , 贾奋励 , 田江鹏 , 杨剑 , 李科 . 机器地图及其概念模型[J]. 地球信息科学学报, 2024 , 26(1) : 25 -34 . DOI: 10.12082/dqxxkx.2024.220837
The autonomous cognition ability of unmanned platforms in complex environments is a key issue that restricts their real-world applications and has become a research hotspot in cartography, artificial intelligence, and robotics. Although the research on environment modeling and learning for unmanned platforms has achieved substantial progress, these platforms still face problems maintaining robustness, adaptability, and continuous learning when leaving well-trained environments for real-world environments. Motivated by cartographic research, this paper reviews the research work from artificial intelligence, robotics, and cognitive science and proposes a novel environment cognition model of unmanned platforms, the machine map. We first rationalize the similarity between the machine map and the mental map with a brief review of the mental map for human spatial cognition and then summarizes the machine map's characteristics. Having reviewed the research findings on the cognitive mechanism of mental maps, we propose the conceptual model of the machine map that features an architecture of "two cycles and three composition maps." The architecture follows design principles drawn from the research on the core cognitive capabilities of artificial cognitive systems. As for the two cycles, the outer cycle demonstrates the machine map's function in an autonomous unmanned platform, while the inner cycle illustrates the key components and the operation logic among them. Motivated by the structure theory of a mental map, the machine map is modeled as a multi-store memory system that consists of a perception map, a working map, and a long-term map. The overall information processing procedure among these three composition maps is discussed to finalize the model design. The conceptual development of machine maps benefits from studying the mental map in cognitive research and the technical innovations in autonomous driving and robotics fields, such as High-Definition maps, SLAM, and BEV. The proposed conceptual model can serve as a top-level research framework and a route map for further research on machine maps. In the end, the paper suggests that the research of machine maps needs a two-way methodology. On the top level, the deductive reasoning of the conceptual model can promote the understanding of the connotation and architecture of machine maps. While on the bottom level, the continuous development of machine learning and artificial intelligence technology can mitigate the restrictions on the environmental cognitive ability of unmanned platforms, resulting in a continuous improvement of the technical framework of machine maps. The research on the machine map can improve the cognitive capabilities of autonomous unmanned platforms in complex environments and illuminate a new path for the development of cartography in the intelligent era. We hope this paper can raise interest in machine maps among the cartographic community and thus promote the development of this emerging field.
表1 机器地图的基本定位与概念模型设计原则Tab. 1 Self-identify and conceptual model design principles of machine maps |
| 编号 | 要点 | 机器地图的目标与定位 | 设计原则 | 说明 | 参考文献 |
|---|---|---|---|---|---|
| 1 | 计算系统和生物启发之间的平衡 | 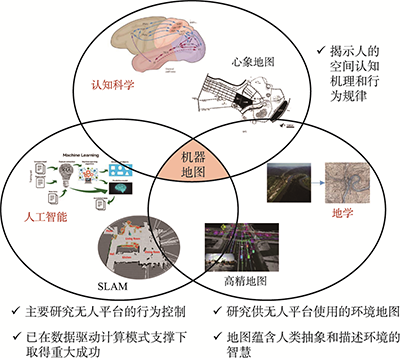 | 采用生物启发与计算系统相结合的技术途径 | 机器地图受心象地图启发而提出,且得益于机器人、人工智能、地图学的交叉融合 | - |
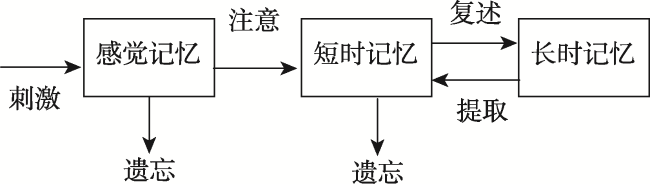
| 2 | 生物模型的抽象水平 | 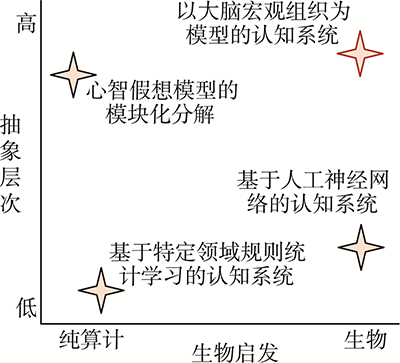 | 借鉴大脑所具有的存储及计算功能以及不同脑区共同完成空间认知的宏观组织模式,设计机器地图的基本构成(左图中红色边框四角星所示) | 空间认知本身涉及大脑的多个脑区与神经系统,且其机制尚未完全探明。因此借鉴心象地图的认知机理,核心在于宏观结构与功能借鉴 | [27] |
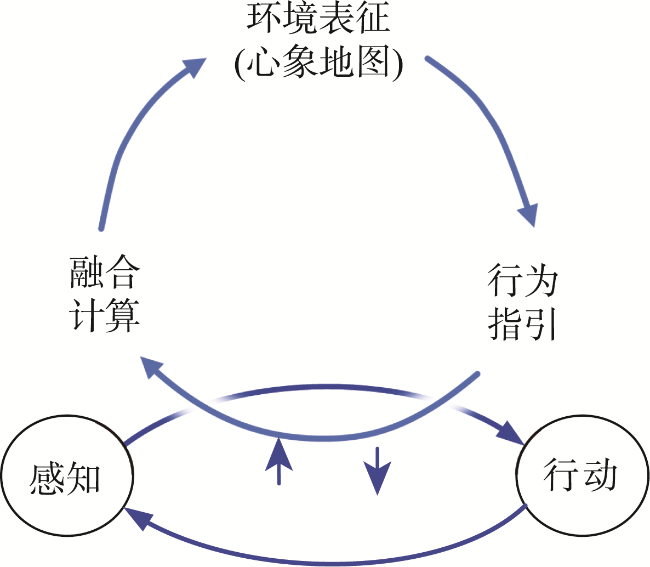
| 3 | 大脑、身体和环境的相互依赖关系 | 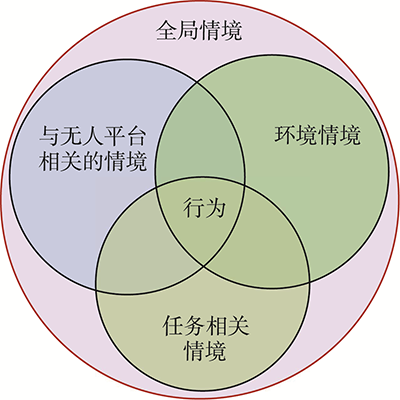 | 机器地图中,无人平台所处的环境、所要完成的任务以及平台自身的特性构建了影响其行为的全局情境(左图中红色边框圆形所包围的内容),并需要依据全局情境推理计算可实施的行为及实现方式 | 具身认知理论认为一个系统的物理形态和运动能力对其理解世界的方式有直接影响。并且认为“身体”和环境在认知过程中起着构成而不是支持作用。因此无人平台能否自主完成空间认知任务,并不单一取决于无人平台的核心计算能力,而与无人平台的情境密切相关 | [36] |
| 4 | 系统行为和采用机制之间的关系 | 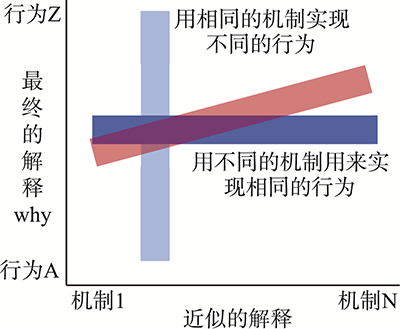 | 机器地图的构建以无人平台环境认知行为的实现为主要目标,同时兼顾机理的探索与解释(左图中红色矩形所示) | 机器地图研究试图改变目前单纯通过传感器特征认知环境的模式,探索环境信息表征和持续自主学习方法,推动稳健、动态与可信的机器环境认知系统的构建,促进其在相关领域的深度应用。同时探索无人平台实现环境认知的机理,以期为人的空间认知机理提供参考与借鉴 | [27] |
表2 机器地图与其他相关工作的比较细则Tab. 2 Detailed items for comparison between machine maps and other related works |
| 比较项 | 电子导航地图 | SLAM | BEV | 高精地图 | 机器地图 | |
|---|---|---|---|---|---|---|
| 主体 | 制图主体 | 人类 | 无人平台 | 无人平台 | 人工主导 | 无人平台 |
| 用图主体 | 人类 | 无人平台 | 无人平台 | 无人平台 | 无人平台 | |
| 地图 模型 | 空间精度 | 低 | 高 | 高 | 超高 | 高 |
| 要素抽象度 | 高 | 低 | 低 | 高 | 高 | |
| 逻辑结构 | 导航要素、拓扑结构 | 栅格、特征、拓扑 | 栅格、特征、拓扑 | 静态、动态和用户层 | 感知、工作和长时地图 | |
| 建模 模式 | 建模逻辑 | 制用分离 | 测制用一体 | 测用一体 | 测制用分离 | 测制用一体 |
| 实时性 | 低 | 高 | 高 | 动态层高,静态和用户层低 | 高 | |
| 自主性 | 自主等级 | 低 | 有条件自主 | 有条件自主 | 有条件自主 | 完全自主 |
| 记忆能力 | 无 | 短时记忆 | 短时记忆 | 短时记忆 | 短时记忆、工作记忆和长时记忆 | |
| 空间注意力 | 人脑注意 | 无 | 特征注意力 | 无 | 全局注意力 | |
| 学习能力 | 人脑学习 | 误差优化 | 学习目标优化 | 低 | 持续自主学习 | |
| 功能作用 | 导航 | 定位、制图 | 定位、导航 | 导航、自动驾驶 | 空间引导 空间决策 | |
| [1] |
The Aspen Institute. Global atlas of autonomous vehicles in cities 136 places on the move[R/OL]. Bloomberg Cities Network. [2022-8-23].https://bloombergcities.jhu.edu/resource/heres-how-136-cities-are-paving-path-future-autonomous-vehicle-technology.
|
| [2] |
GlobalData. UAV and Drones: The stealthy weapon in the ukraine-russia conflict[EB/OL].(2022-03-20).[2022-08-23]. https://www.globaldata.com/data-insights/macroeconomic/uav-and-drones-the-stealthy-weapon-in-the-ukraine-russia-conflict/.
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
孟立秋. 自主导航地图的昨天、今天和明天[J]. 测绘学报, 2022, 51(6):1029-1039.
[
|
| [10] |
|
| [11] |
刘经南, 詹骄, 郭迟, 等. 智能高精地图数据逻辑结构与关键技术[J]. 测绘学报, 2019, 48(8):939-953.
[
|
| [12] |
余卓渊, 闾国年, 张夕宁, 等. 全息高精度导航地图:概念及理论模型[J]. 地球信息科学学报, 2020, 22(4):760-771.
[
|
| [13] |
詹骄, 郭迟, 雷婷婷, 等. 自动驾驶地图的数据标准比较研究[J]. 中国图象图形学报, 2021, 26(1):36-48.
[
|
| [14] |
高俊, 曹雪峰. 空间认知推动地图学学科发展的新方向[J]. 测绘学报, 2021, 50(6):711-725.
[
|
| [15] |
朱世强. 生物启发的人工智能与未来机器人[J]. 机器人技术与应用, 2018(03):21-22,26.
[
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
鲍旭辉. 视觉长时记忆对视觉短时记忆的促进作用[D]. 西安: 陕西师范大学, 2014.
[
|
| [27] |
|
| [28] |
|
| [29] |
|
| [30] |
|
| [31] |
|
| [32] |
|
| [33] |
|
| [34] |
|
| [35] |
彭聃龄. 普通心理学[M]. 5版. 北京: 北京师范大学出版社, 2019.
[
|
| [36] |
|
| [37] |
|
| [38] |
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}