
增强现实地图载体的空间认知负荷特征研究
|
张国永(1987— ),男,山东潍坊人,博士,主要从事增强地理环境研究。E-mail: zhangguoyong@aircas.ac.cn |
Copy editor: 蒋树芳
收稿日期: 2022-09-09
修回日期: 2022-11-17
网络出版日期: 2024-03-26
基金资助
中国科学院空天信息创新研究院前沿科学与颠覆性技术研究先导基金(E0Z211010F)
Research on Spatial Cognitive Load Characteristics of Augmented Reality Maps on Different Carriers
Received date: 2022-09-09
Revised date: 2022-11-17
Online published: 2024-03-26
Supported by
Pilot Fund of Frontier Science and Disruptive Technology of Aerospace Information Research Institute, Chinese Academy of Sciences(E0Z211010F)
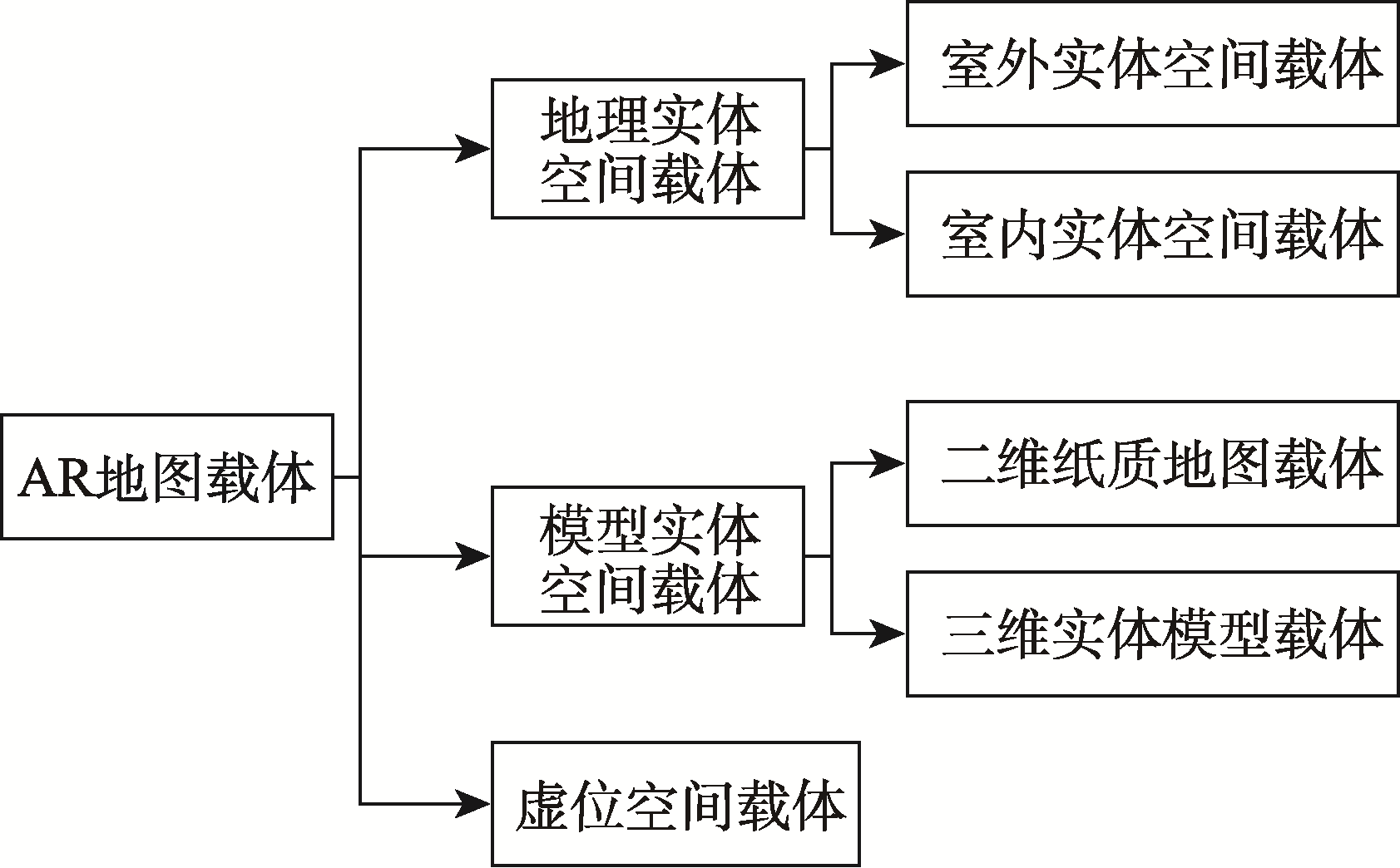
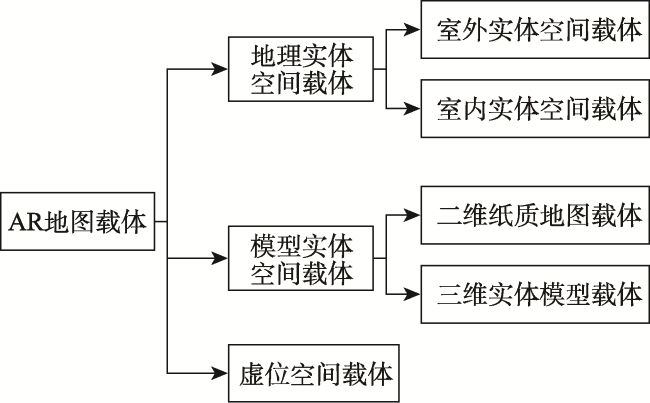
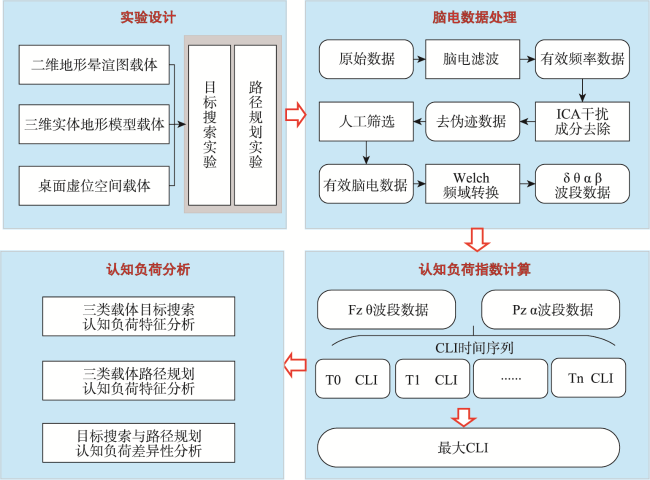
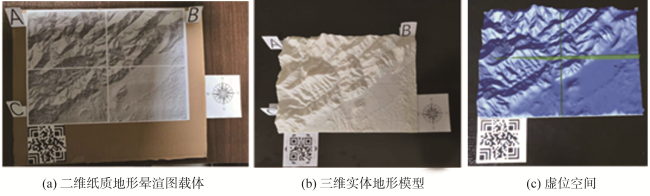
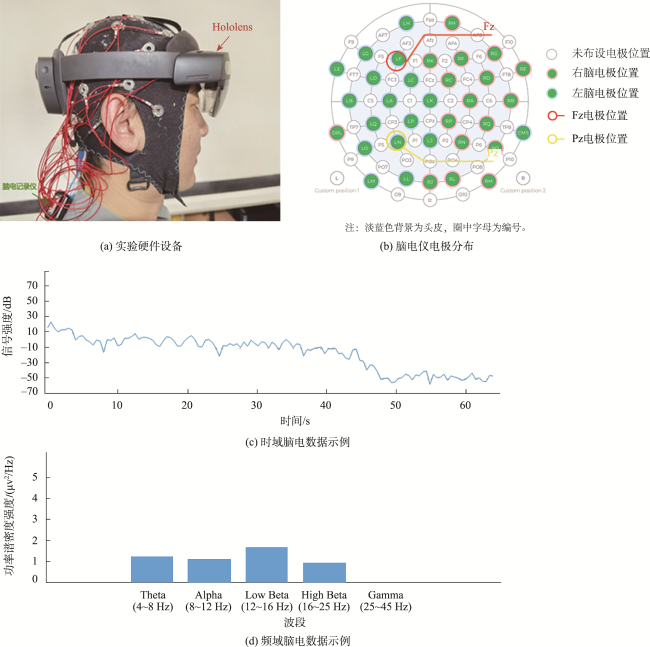
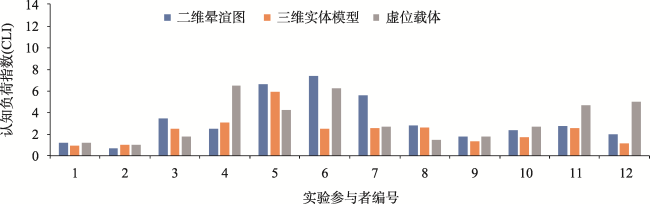
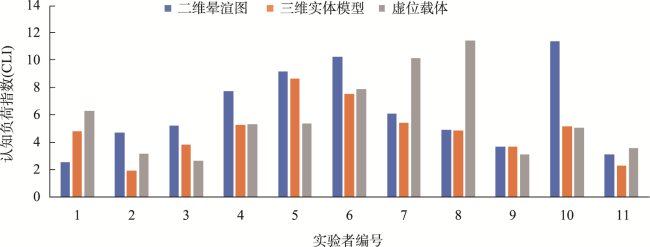
本文依据增强现实数字地图与地理场景在时空、尺度和语义等的上下文关联性,研究并划分了包括存在上下文关联的地理实体空间载体、模型实体空间载体,以及不存在上下文关联的虚位空间载体三类AR地图载体。选取二维纸质地形晕渲图、三维打印地形实体模型、以及桌面虚位空间3种不同类型载体的AR地图为研究对象,以目标搜索和路径规划为任务目标,开展不同载体AR地图空间认知实验研究。结果表明,在2组实验中三维实体模型载体AR地图的认知负荷指数(CLI)分别为2.53和4.84均显著低于二维地图和虚位载体,具有认知负荷低、沉浸在场感强的认知特征;二维地图载体的认知负荷指数略低于虚位空间载体,但两者并无显著差异;同时,两组实验对比分析结果显示,随着任务难度提升,二维地图载体和虚位空间载体AR地图的认知负荷显著增加,但三维实体模型载体AR地图的认知负荷未显著增加,表明实体模型载体在面向复杂空间认知任务时具有较低认知负荷的优势。此外CLI和任务难度的同步变化也表明脑电数据对空间认知实验敏感,能有效反映空间认知实验过程中的认知特征变化。
张国永 , 龚建华 , 张冬 . 增强现实地图载体的空间认知负荷特征研究[J]. 地球信息科学学报, 2024 , 26(1) : 99 -109 . DOI: 10.12082/dqxxkx.2024.220675
By overlaying virtual map sceneries over the real-world carrier, augmented reality could generate a mixed virtual and real spatial data expression and perception interactive environment. The digital map and its carrier are viewed by the user as a single unit simultaneously in the AR map display environment, creating a novel spatial cognitive characteristic that is distinct from conventional 2D and 3D maps. The variety of its mixed carriers is also wider than conventional maps because the head-mounted augmented reality device can produce binocular stereo vision. In this study, the analysis of the taxonomy of augmented reality map carriers (i.e., geographic entity space carriers, model entity space carriers, and virtual space carriers) is based on the contextual relevance of augmented reality digital maps and actual geographic sceneries in time, place, and semantics. We select these three different types of carriers because of the striking contrasts in the visual expression and cognitive environment produced by digital map scenes and various carriers. Specifically, HoloLens MR glasses, an electroencephalogram, and a 2D paper terrain-shaded map are used in this study. The target identification and route plan tasks on the AR map carrier served as the experimental task, and the study quantifies the analysis of the activity intensity of various brain functional areas during the cognitive process and evaluates the cognition load performance of various carriers in the AR map environment. Our findings show that the AR map based on the 3D-printed physical terrain carrier provides the most immersive experience and has the least cognition load level in both experiments. The results of the comparative analysis of the two tasks also show that in the 3D-printed physical terrain carrier, the CLI does not increase significantly with the complexity of the spatial cognitive task. This suggests that the physical terrain carrier AR map is more advantageous when facing a complex spatial cognition environment. In addition, the synchronous changes of CLI and task difficulty also indicate that EEG data are sensitive to spatial cognition experiments and can effectively reflect changes in cognitive characteristics during spatial cognition experiments.
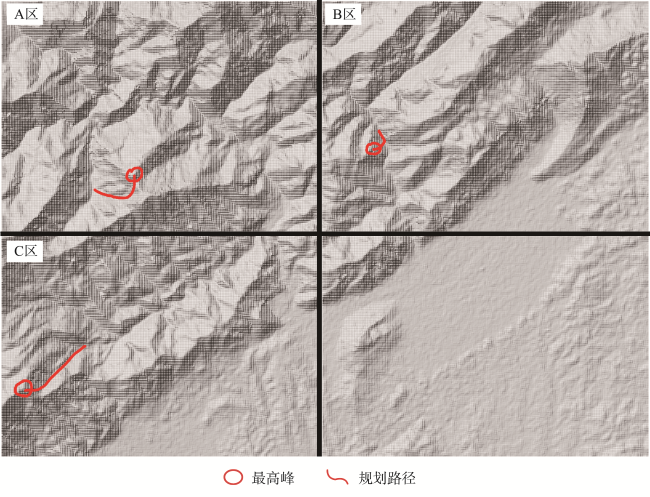
表1 实验任务Tab. 1 Experiment tasks |
| 实验 | 实验内容 | 任务描述 | 实验次数/次 |
|---|---|---|---|
| 实验一 | 目标搜索 | 寻找A、B、C指定区域内的最高峰 | 1 |
| 实验二 | 路径规划 | 在A、B、C区域内,规划从最高山峰到山脚的最短路径 | 1 |
表2 目标搜索与路径规划实验认知负荷指数差异检验统计结果Tab. 2 Statistics of the difference of CLI between target identification and route planning experiments |
| 载体类型 | 实验 | M(P25, P75) | 样本秩和检验 | |
|---|---|---|---|---|
| Z | p | |||
| 二维晕渲图 | 实验一 | 2.65(1.87, 5.08) | -2.59 | 0.01* |
| 实验二 | 5.18(3.64, 9.15) | |||
| 三维实体模型 | 实验一 | 2.53(1.19,2.64) | -1.85 | 0.07 |
| 实验二 | 4.84(3.67,5.38) | |||
| 虚位载体 | 实验一 | 2.73(1.56, 4.94) | -3.45 | 0.00* |
| 实验二 | 5.31(3.14, 7.88) | |||
注:*表示P值小于0.05,表明对比项的差异具有统计学显著性。 |
| [1] |
高俊. 换一个视角看地图[J]. 测绘通报, 2009(1):1-5.
|
| [2] |
高俊, 曹雪峰. 空间认知推动地图学学科发展的新方向[J]. 测绘学报, 2021, 50(6):711-725.
[
|
| [3] |
龚建华, 李文航, 张国永, 等. 增强地理环境中过程可视化方法——以人群疏散模拟为例[J]. 测绘学报, 2018, 47(8):1089-1097.
[
|
| [4] |
张国永. 增强地理环境的虚实融合制图认知与方法研究[D]. 北京: 中国科学院大学(中国科学院空天信息创新研究院), 2021.
[
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
万刚, 高俊, 刘颖真. 基于阅读实验方法的认知地图形成研究[J]. 遥感学报, 2008, 12(2):339-346.
[
|
| [11] |
万刚, 武易天. 地图空间认知的数学基础[J]. 测绘学报, 2021, 50(6):726-738.
[
|
| [12] |
陈辉, 郭健, 李爱光, 等. 面向交通应用场景的增强现实地图载负量及多尺度显示模型[J]. 测绘科学技术学报, 2019, 36(1):105-110.
[
|
| [13] |
|
| [14] |
郭仁忠, 应申. 论ICT时代的地图学复兴[J]. 测绘学报, 2017, 46(10):1274-1283.
[
|
| [15] |
郭仁忠, 陈业滨, 应申, 等. 三元空间下的泛地图可视化维度[J]. 武汉大学学报·信息科学版, 2018, 43(11):1603-1610.
[
|
| [16] |
董卫华, 廖华, 詹智成, 等. 2008年以来地图学眼动与视觉认知研究新进展[J]. 地理学报, 2019, 74(3):599-614. [
[
|
| [17] |
郑束蕾. 地理空间认知理论与地图工具的发展[J]. 测绘学报, 2021, 50(6):766-776.
[
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
孙崇勇. 认知负荷的理论与实证研究[M]. 沈阳: 辽宁人民出版社, 2014.
[
|
| [27] |
龚建华. 元宇宙-虚拟地理环境发展回顾与思考[EB/OL]//科学网.(2022-07-26)[2022-09-07]. https://blog.sciencenet.cn/blog-113556-1348895.html.
[
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}