
时空对象行为驱动的城市感知设施虚实联动交互控制方法
|
杨飞(1991— ),男,四川绵阳人,博士,讲师,研究方向为时空大数据分析、智能设施管理。E-mail: feiyang@nudt.edu.cn |
Copy editor: 蒋树芳
收稿日期: 2023-08-27
修回日期: 2023-11-17
网络出版日期: 2024-03-31
基金资助
国家自然科学基金(42201490)
国家重点研发计划项目(2021YFB3900900)
A Method for Spatiotemporal Object Behavior-Driven Interactive Control of Urban Sensing Facilities with Virtual-Reality Integration
Received date: 2023-08-27
Revised date: 2023-11-17
Online published: 2024-03-31
Supported by
General Project of National Natural Science Foundation of China,(42201490)
National Key Research and Development Program of China(2021YFB3900900)
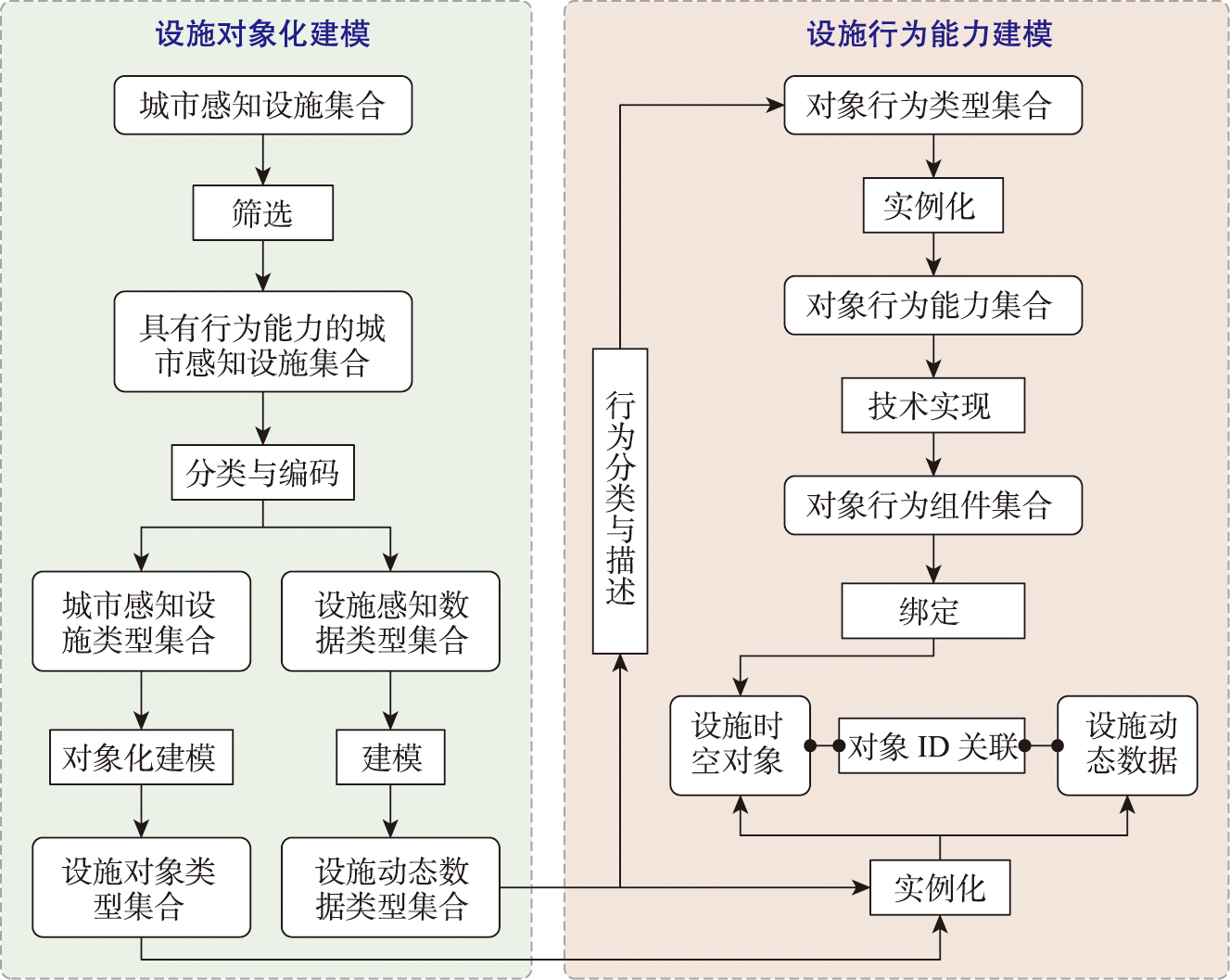
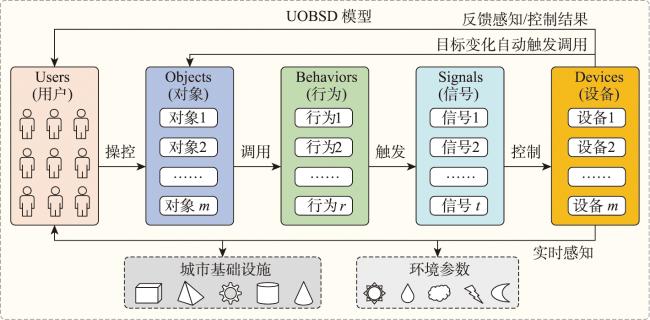
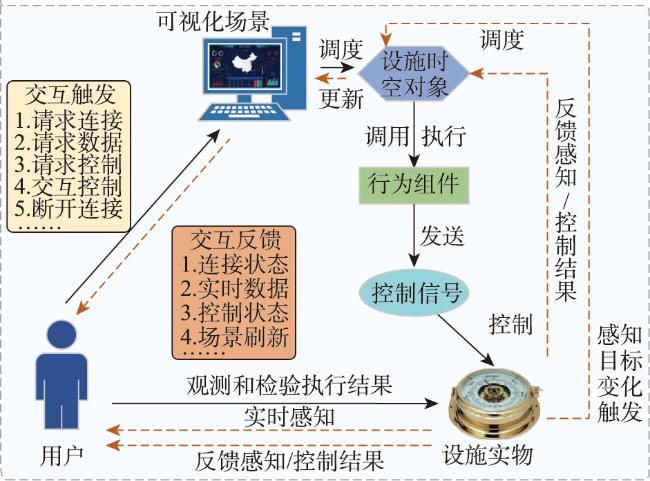
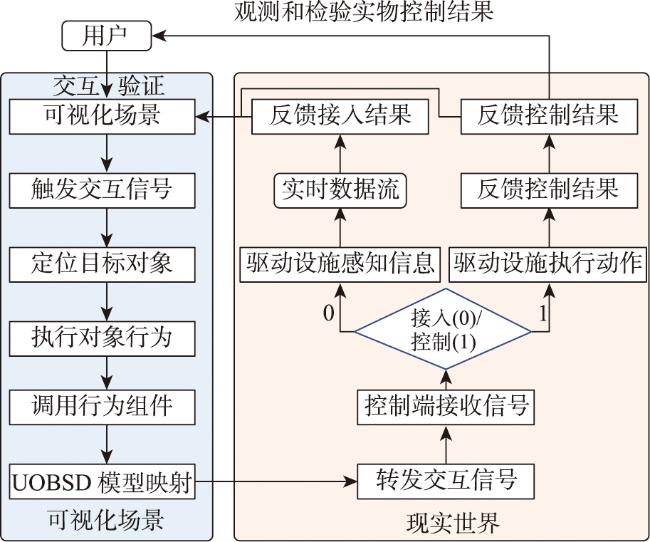
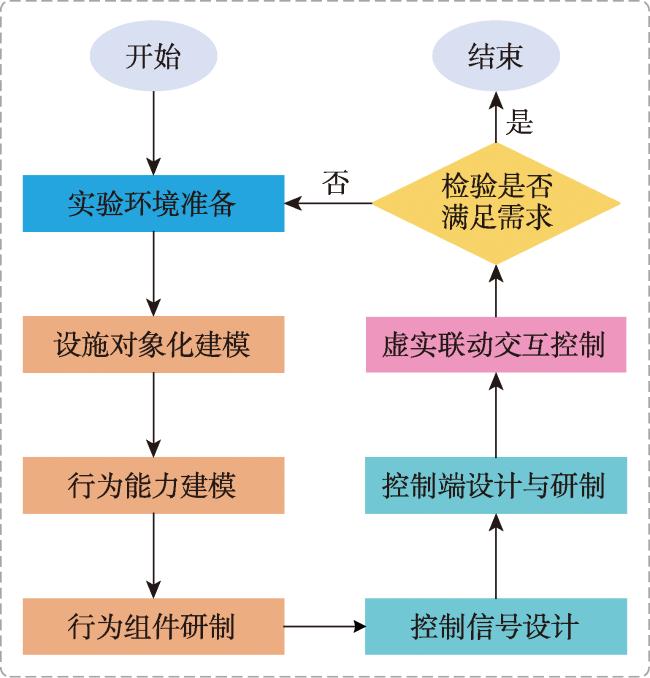
基于时空数据模型来描述现实世界的时空实体,以及基于时空对象的行为能力建模来控制时空实体的行为动作,既是对GIS时空数据模型的创新扩展,也能够适应数字孪生城市建设中对人、机、物三元融合表达和交互分析的现实需求。作为城市基础设施的重要组成部分,城市感知设施是典型的时空实体,其交互控制的相关研究目前主要集中于物联网、 VR/AR以及GIS领域,而这些领域普遍缺失对基于GIS构建的数字世界中城市感知设施的交互控制研究。针对上述问题,基于全空间信息系统的多粒度时空对象数据模型对城市感知设施的行为能力进行建模,在此基础上提出一种时空对象行为驱动的城市感知设施虚实联动交互控制方法。通过构建设施时空对象的交互控制“五元组”模型,能够支持用户通过虚拟场景与设施实物之间的虚实联动交互控制,从而将基于直接通信指令的城市感知设施交互控制过程在数字世界中进行表达,为数字孪生城市中的感知设施智能化、交互式分析应用提供理论与技术支撑。实验结果表明,所提出的城市感知设施交互控制方法具备有效性与可行性。
杨飞 , 李响 , 曹一冰 , 赵鑫科 , 王丽娜 , 吴烨 . 时空对象行为驱动的城市感知设施虚实联动交互控制方法[J]. 地球信息科学学报, 2024 , 26(3) : 543 -555 . DOI: 10.12082/dqxxkx.2024.230497
In recent years, with the continuous development and rapid iteration of emerging technologies such as mobile communication, big data, the Internet of Things (IoT), Artificial Intelligence (AI), digital twins, and autonomous driving, new smart cities have become a significant frontier in the field of Geographic Information Systems (GIS) applications. Digital twin cities represent a complex integrated technological system that underpins the development of next-generation smart cities. Intelligent, holistic mapping for digital twin cities relies on comprehensive urban sensing, and the interactive control of urban sensing facilities plays a pivotal role in achieving the seamless integration of the physical and digital aspects of digital twin cities, fostering the convergence of entities within the urban environment. Describing spatiotemporal entities of the real world through a spatiotemporal data model, as well as modeling the behavioral capabilities of these entities using spatiotemporal object behavior, represents not only an innovative extension of GIS spatiotemporal data models but also addresses the practical requirements of triadic fusion and interactive analysis of human, machine, and object components with the development of digital twin city. As a crucial facet of urban infrastructure, urban sensing facilities epitomize distinctive spatiotemporal entities. Current research into the interactive control of these facilities is predominantly concentrated within the domains of the IoT, Virtual Reality/Augmented Reality (VR/AR), and GIS. However, these domains often lack research pertaining to interactive control of urban sensing facilities within the GIS-based digital realm. To tackle these issues, a viable approach involves mapping the direct physical control processes of humans over objects in the Internet of Things domain to the realm of GIS. Specifically, this involves using a GIS spatiotemporal data model to abstractly represent urban sensing facilities in the real world as spatiotemporal entities. These entities are then expressed as spatiotemporal objects within a spatial information system. Subsequently, the changes or actions of these facility spatiotemporal entities are uniformly abstracted as the behavioral capabilities of these spatiotemporal facility objects. Ultimately, the interaction control of these sensing facilities by humans is transformed into a process where humans invoke the behavioral capabilities of facility spatiotemporal objects, resulting in specific outcomes. Based on the aforementioned idea, this study employs a multi-granular spatiotemporal object data model to construct behavior capabilities for urban sensing facilities. Building upon this foundation, a spatiotemporal object behavior-driven approach for interactive control of urban sensing facilities with virtual-reality integration is introduced. By constructing a "quintuple" model for interactive control of facility objects, this approach facilitates users in engaging in interactive control through a reciprocal linkage between virtual scenarios and physical facilities. This mechanism effectively translates the process of urban sensing facility interaction control based on direct communication commands into the digital world, providing theoretical and technical support for the intelligent and interactive analytical applications of sensing facilities within digital twin cities. Experimental results substantiate the effectiveness and feasibility of the proposed method for interactive control of urban sensing facilities.
表1 实验环境以及实验过程中产生的实时数据Tab. 1 Experimental environment and real-time data generated during the experiment |
| 环境类别 | 环境名称 | 数量/个 | 详细配置 | 设施实时数据 |
|---|---|---|---|---|
| 硬件环境 | 计算机 | 3 | Thinkpad T460,AMD四核CPU,8 G内存,512G SSD | |
| 无人机(MavLink) | 1 | DJI Air 2S,一英寸相机5.4 K超高清视频 | 实时视频流 | |
| 无人车(GPS) | 2 | YahBoom STM32 | GPS轨迹数据 | |
| 摄像头(Ethernet、Wi-Fi) | 2 | 浙江大华DH-IPC-HDBW2433R-ZS、海康威视HIKVISION T12H-IA 2.8 MM | 视频流 | |
| 温度传感器(Wi-Fi) | 2 | Vadias WZP-PT100 | 温度数据 | |
| 湿度传感器(Wi-Fi) | 2 | RicherLink | 湿度数据 | |
| 姿态传感器(串口RS485) | 2 | DCS306M | 姿态数据 | |
| 设施模拟器(Socket) | 50 | C++应用程序 | GPS轨迹、温度数据、湿度数据 | |
| 软件环境 | 操作系统 | 4 | Windows 10 | |
| 集成开发环境 | Visual Studio 2010;Qt 4.8.6;VBF | |||
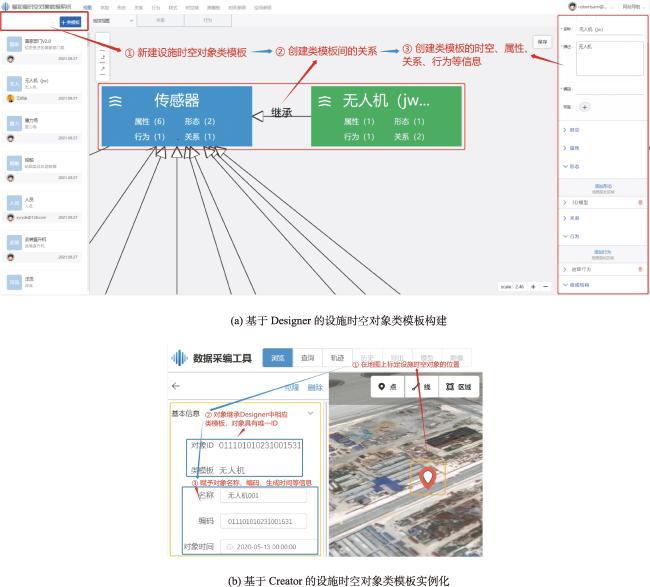
| 其他工具 | 全空间信息系统建模工具Designer和Creator |
| [1] |
王家耀. 新型智慧城市与时空大数据平台[R]. 首届粤港澳大湾区地理信息发展高峰论坛, 广东: 珠海度假村, 2018.
[
|
| [2] |
郭仁忠, 林浩嘉, 贺彪, 等. 面向智慧城市的GIS框架[J]. 武汉大学学报·信息科学版, 2020, 45(12):1829-1835.
[
|
| [3] |
顾建祥, 杨必胜, 董震, 等. 面向数字孪生城市的智能化全息测绘[J]. 测绘通报, 2020(6):134-140.
[
|
| [4] |
张新长, 廖曦, 阮永俭. 智慧城市建设中的数字孪生与元宇宙探讨[J]. 测绘通报, 2023(1):1-7,13.
[
|
| [5] |
|
| [6] |
|
| [7] |
龚健雅, 李小龙, 吴华意. 实时GIS时空数据模型[J]. 测绘学报, 2014, 43(3):226-232,275.
[
|
| [8] |
Esri中国信息技术有限公司. ArcGIS 10.7白皮书[R]. 北京: Esri中国信息技术有限公司, 2019.
[Esri China Information Technology Co. Ltd.. ArcGIS 10.7 white paper[R]. Beijing: Esri China Information Technology Co. Ltd., 2019. ]
|
| [9] |
自然资源部办公厅. 实景三维中国建设技术大纲[R]. 北京: 自然资源部, 2021.
[ General Office of the Ministry of Natural Resources of the People's Republic of China. Realistic 3D China construction technology outline[R]. Beijing: Ministry of Natural Resources of the People's Republic of China, 2021. ]
|
| [10] |
周成虎. 全空间地理信息系统展望[J]. 地理科学进展, 2015, 34(2):129-131.
[
|
| [11] |
华一新. 全空间信息系统的核心问题和关键技术[J]. 测绘科学技术学报, 2016, 33(4):331-335.
[
|
| [12] |
华一新, 周成虎. 面向全空间信息系统的多粒度时空对象数据模型描述框架[J]. 地球信息科学学报, 2017, 19(9):1142-1149.
[
|
| [13] |
华一新, 张江水, 曹一冰. 基于时空域的全空间数字世界时空对象组织与管理研究[J]. 地球信息科学学报, 2021, 23(1):76-83.
[
|
| [14] |
王培. 多粒度时空对象空间形态理论和方法研究[D]. 郑州: 战略支援部队信息工程大学, 2019:18-23.
[
|
| [15] |
郭玮, 谷宇航, 江南. 面向多粒度时空对象数据模型的网络电子地图生成方法[J]. 地球信息科学学报, 2022, 24(7):1264-1274.
[
|
| [16] |
杨飞, 华一新, 李响, 等. 基于多粒度时空对象数据模型的城市基础设施建模与管理[J]. 地球信息科学学报, 2021, 23(11):1984-1997.
[
|
| [17] |
曹一冰, 华一新, 郭邵萌. 多粒度时空对象行为特征的描述方法研究[J]. 地理信息世界, 2018, 25(2):23-29.
[
|
| [18] |
杨飞, 华一新, 李响, 等. 多粒度时空对象行为驱动的传感设施接入方法[J]. 测绘科学技术学报, 2020, 37(5):537-544.
[
|
| [19] |
曹一冰, 张江水, 华一新, 等. 全空间时空对象可视化工具的设计与实现[J]. 测绘科学技术学报, 2021, 38(2):173-180.
[
|
/
| 〈 |
|
〉 |

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}