
面向城市交通的动态知识图谱综述——构建、表示与应用
|
刘奕含(1998— ),女,辽宁抚顺人,硕士,研究方向为知识图谱及智慧交通。E-mail: yihanliu_1998@henu.edu.cn |
收稿日期: 2023-09-23
修回日期: 2023-11-29
网络出版日期: 2024-05-11
基金资助
国家自然科学基金项目(62176088)
国家重点研发计划政府间国际科技创新合作专项(2023YFE0112500)
河南省科技攻关计划(222102210067)
河南省科技攻关计划(222102520028)
河南省高等学校重点科研项目(22A120001)
Survey of Dynamic Knowledge Graph for Urban Traffic: Construction, Representation and Application
Received date: 2023-09-23
Revised date: 2023-11-29
Online published: 2024-05-11
Supported by
National Natural Science Foundation of China(62176088)
International Strategic Innovative Project of National Key Research & Development Program of China(2023YFE0112500)
Key Science and Technology Research Project of Henan Province of China(222102210067)
Key Science and Technology Research Project of Henan Province of China(222102520028)
Key Project of Science & Technology Research of the Education Department of Henan Province(22A120001)
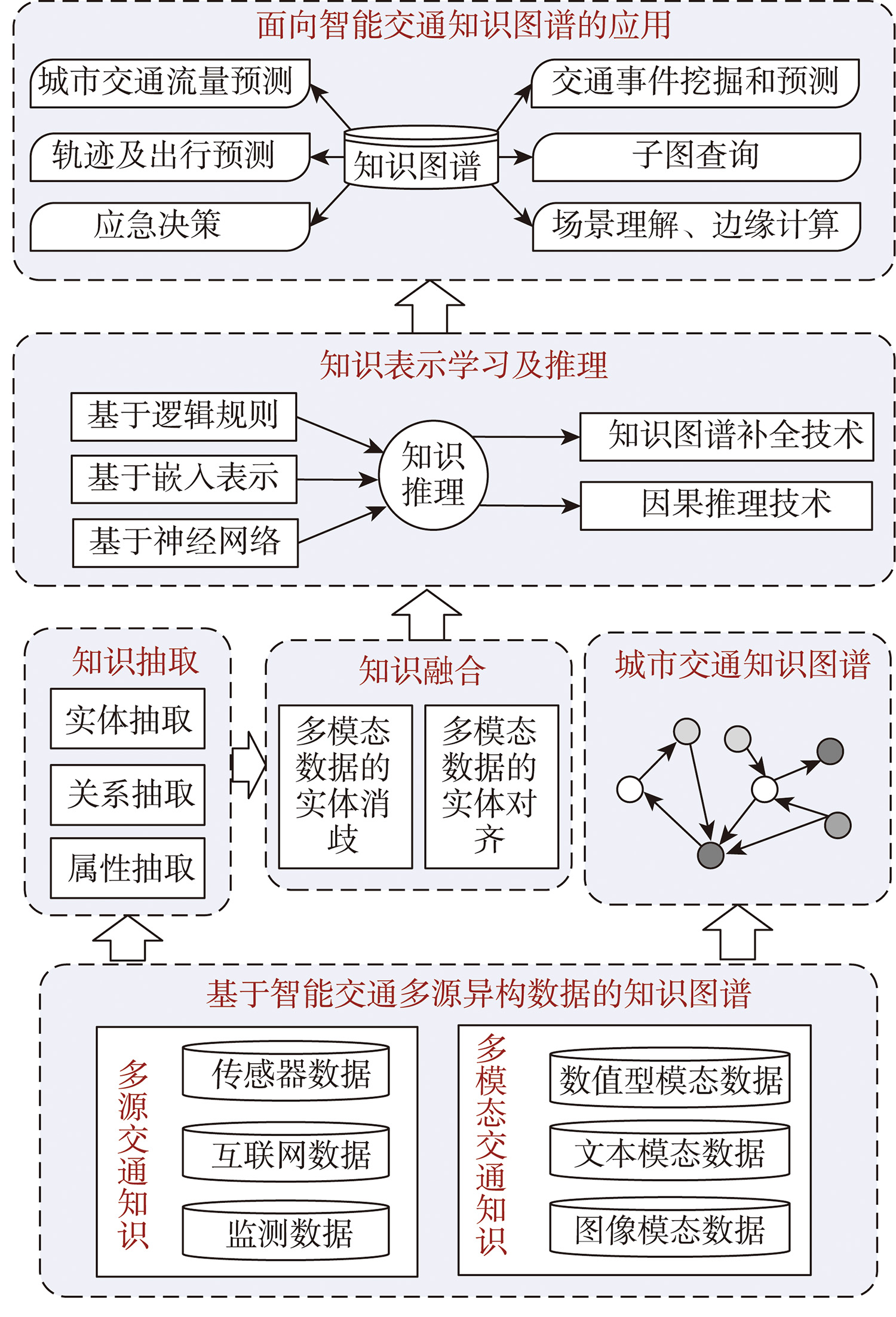
在智能交通领域中,各种信息采集设备积累了海量的多源异构数据,如车辆轨迹、道路状态、交通事件等。如何依据这些海量的交通数据进行关联整合,并利用这些数据进行辅助决策是当前面临的挑战。为应对这些挑战,知识图谱技术由于其具有强大的实体间关联建模能力,在知识挖掘、表示、管理及推理能力等方面显现出了巨大的应用潜力。首先,本文依次针对地理交通图、多模态知识图谱及动态知识图谱的构建技术进行综述,以此展示知识图谱在智能交通领域的广泛适用性。接着对智能交通领域的各类知识图谱构建方法进行介绍。其次,对智能交通领域的知识图谱表示学习技术及知识推理技术进行归纳总结。其中涵盖了多模态知识图谱表示学习的相关算法以及动态知识图谱表示学习的探讨,并展开介绍了动态交通多模态知识图谱中的补全技术和因果推理技术,对于提高智能交通系统的数据理解能力和决策推理水平具有重要的理论意义和实际应用前景。再次,归纳整理了几个应用场景下知识图谱为城市的智能决策提供重要支撑的解决方案。最后,对现有技术瓶颈进行了分析和探讨,并对未来交通知识图谱的关键技术及其辅助应用进行了展望。
刘奕含 , 宁念文 , 杨东霖 , 李伟 , 吴斌 , 周毅 . 面向城市交通的动态知识图谱综述——构建、表示与应用[J]. 地球信息科学学报, 2024 , 26(4) : 946 -966 . DOI: 10.12082/dqxxkx.2024.230572
In the field of intelligent transportation, various information collection devices have produced a massive amount of multi-source heterogeneous data. These data encompass various types of information, including vehicle trajectories, road conditions, and traffic incidents, soured from devices such as traffic cameras, sensors, and GPS. However, the current challenge faced by researchers and practitioners is how to correlate and integrate the massive amount of heterogeneous data to facilitate decision support. To address this challenge, knowledge graph technology, with its powerful entity-to-entity modeling ability, has shown great potential in knowledge mining, representation, management, and reasoning, making it well-suited for intelligent transportation applications. In this paper, we first review the construction techniques for geographic traffic graphs, multimodal knowledge graphs, and dynamic knowledge graphs, demonstrating the broad applicability of knowledge graphs in the field of intelligent transportation. Secondly, we summarize relevant algorithms of multi-modal knowledge graph representation learning and discuss dynamic knowledge graph representation learning in the field of intelligent transportation. Knowledge graph representation learning technology plays a crucial role in creating high-quality knowledge graphs by capturing and organizing the relationships between entities and their attributes within the transportation domain. This technology utilizes advanced machine learning algorithms to analyze and process the heterogeneous data from various sources to extract meaningful patterns and structures. We also introduce the completion technology and causal reasoning technology in dynamic transportation multi-modal knowledge graph, which is useful for improving the data of intelligent transportation systems. Comprehension ability and decision-making reasoning level have important theoretical significance and practical application prospects. Thirdly, we summarize the solutions of knowledge graph that provide important support for intelligent decision-making in several application scenarios. The utilization of knowledge graphs in intelligent transportation systems facilitates real-time data integration and enables correlation analysis of diverse data sources to provide a holistic view of the traffic ecosystem. This comprehensive understanding empowers decision-makers to implement targeted interventions and proactive measures, ultimately mitigating traffic congestion and reducing the occurrence of accidents. Through the continuous refinement and enrichment of the traffic knowledge graph, the intelligent transportation system can adapt and evolve to address emerging challenges and optimize transport networks for enhanced efficiency and safety. Finally, we analyze and discuss the existing technical bottlenecks. The future of traffic knowledge graphs and their auxiliary applications are also prospected and discussed, highlighting the potential impact of this important technology on intelligent transportation systems.
表1 交通领域各类知识图谱对比Tab. 1 Comparison of various types of knowledge graphs in transportation |
| 类型 | 优势 | 不足 |
|---|---|---|
| 静态知识图谱 | 描述精确,能够准确描述交通领域实体间的关系和属性,包括道路网络拓扑结构、交通规则等静态信息;适于长期存储和高效查询,支持路径规划、道路管理等应用 | 缺乏实时性,无法实时反映交通状况的变化,对实时决策和调整有限;对于动态变化的需求有限,如交通流量预测、拥堵分析等 |
| 动态知识图谱 | 具有实时性,能够捕捉实时数据,对于实时决策和调整具有较强的支持能力;能够追踪和分析实体的历史演化过程,对于预测、推荐系统以及时间序列分析等应用具有价值 | 图谱构建和维护方面面临数据质量和准确性方面的挑战,需要处理噪声、数据缺失等问题;存储和计算成本较高 |
| 多模态知识图谱 | 信息全面,可以提供更加全面丰富的交通状况描述;综合分析多种模态数据,帮助进行交通态势分析 | 数据量较大,计算复杂度较高;需要解决数据融合和一致性的问题 |
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
刘俊楠, 刘海砚, 陈晓慧, 等. 基于地理空间数据的知识图谱构建技术研究[J]. 中文信息学报, 2020, 34(11):29-36.
[
|
| [5] |
陆锋, 诸云强, 张雪英. 时空知识图谱研究进展与展望[J]. 地球信息科学学报, 2023, 25(6):1091-1105.
[
|
| [6] |
|
| [7] |
江旭晖, 沈英汉, 李子健, 等. 社交知识图谱研究综述[J]. 计算机学报, 2023, 46(2):304-330.
[
|
| [8] |
|
| [9] |
王萌, 王昊奋, 李博涵, 等. 新一代知识图谱关键技术综述[J]. 计算机研究与发展, 2022, 59(9):1947-1965.
[
|
| [10] |
孙水发, 李小龙, 李伟生, 等. 图神经网络应用于知识图谱推理的研究综述[J]. 计算机科学与探索, 2023, 17(1):27-52.
[
|
| [11] |
|
| [12] |
|
| [13] |
张雪英, 张春菊, 吴明光, 等. 顾及时空特征的地理知识图谱构建方法[J]. 中国科学:信息科学, 2020, 50(7):1019-1032.
[
|
| [14] |
马亚中, 张聪聪, 徐大鹏, 等. 城市大脑知识图谱构建及应用研究[J]. 中文信息学报, 2022, 36(4):48-56.
[
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
翟社平, 李方怡, 李航, 等. 融合层次类型信息的双向图注意力机制的知识图谱嵌入模型[J]. 计算机应用研究, 2023, 40(7):2031-2038.
[
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
|
| [29] |
|
| [30] |
|
| [31] |
|
| [32] |
|
| [33] |
|
| [34] |
|
| [35] |
|
| [36] |
|
| [37] |
张天成, 田雪, 孙相会, 等. 知识图谱嵌入技术研究综述[J]. 软件学报, 2023, 34(1):277-311.
[
|
| [38] |
|
| [39] |
|
| [40] |
|
| [41] |
|
| [42] |
|
| [43] |
|
| [44] |
|
| [45] |
|
| [46] |
|
| [47] |
|
| [48] |
|
| [49] |
|
| [50] |
|
| [51] |
|
| [52] |
|
| [53] |
|
| [54] |
|
| [55] |
|
| [56] |
|
| [57] |
|
| [58] |
朱超宇, 刘雷. 基于知识图谱的医学决策支持应用综述[J]. 数据分析与知识发现, 2020, 4(12):26-32.
[
|
| [59] |
|
| [60] |
|
| [61] |
|
| [62] |
|
| [63] |
|
| [64] |
|
| [65] |
|
| [66] |
|
| [67] |
|
| [68] |
|
| [69] |
|
| [70] |
|
| [71] |
|
| [72] |
|
| [73] |
|
| [74] |
|
| [75] |
|
| [76] |
|
| [77] |
吴瑕, 赵小明, 余建坤. 轨迹图谱:一种基于知识图谱结构的轨迹信息抽取方法[J]. 计算机应用研究, 2020, 37(11):3255-3262.
[
|
| [78] |
|
| [79] |
|
| [80] |
王翠, 胡昊天, 邓三鸿. 面向道路交通违法行为的事理图谱构建技术[J]. 交通信息与安全, 2022, 40(1):36-44.
[
|
| [81] |
|
| [82] |
朱广宇, 张萌, 裔扬. 基于知识图谱的城市轨道交通突发事件演化结果预测[J]. 电子与信息学报, 2023, 45(3):949-957.
[
|
| [83] |
|
| [84] |
|
| [85] |
|
| [86] |
|
| [87] |
|
| [88] |
|
| [89] |
|
/
| 〈 |
|
〉 |













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}