
线面特征约束的跨源点云配准方法
|
李华蓉(1980—),女,重庆人,博士,副教授,主要从事点云配准、地图学和地理信息系统研究。E-mail: 990020040625@cqjtu.edu.cn |
收稿日期: 2023-11-03
修回日期: 2024-02-04
网络出版日期: 2024-05-21
基金资助
重庆市研究生联合培养基地建设项目(JDLHPYJD2020005)
重庆市自然科学基金面上项目(CSTB2023NSCQ-MSX0880)
重庆市自然科学基金面上项目(CSTB2022NSCQ-MSX1625)
重庆市教育委员会科学技术研究项目(KJQN202100734)
Cross-source Point Cloud Registration Method Based on Line-Planar Feature Constraints
Received date: 2023-11-03
Revised date: 2024-02-04
Online published: 2024-05-21
Supported by
Graduate Joint Training Base Construction Project of Chongqing(JDLHPYJD2020005)
Natural Science Foundation's general project of Chongqing(CSTB2023NSCQ-MSX0880)
Natural Science Foundation's general project of Chongqing(CSTB2022NSCQ-MSX1625)
Science and Technology Research Project of Chongqing Education Commission(KJQN202100734)
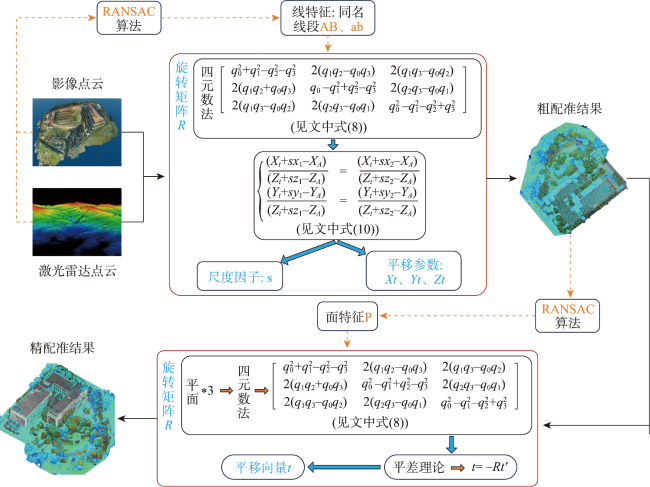
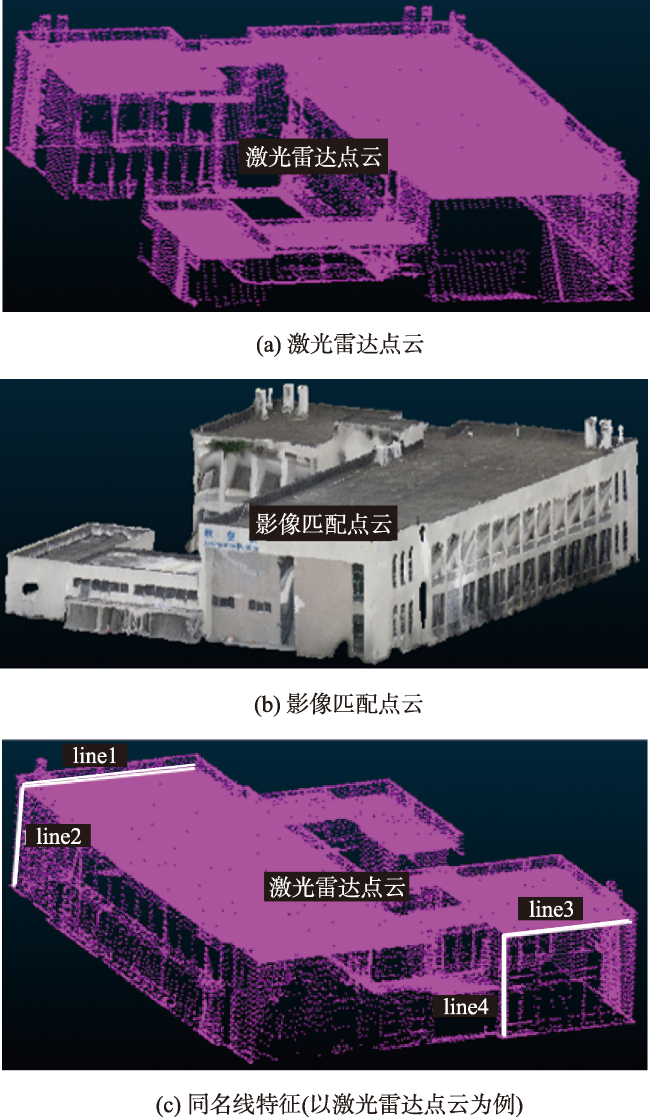
随着三维传感器和三维重建技术的发展,跨源点云的配准融合成为了一个研究热点。传统的配准方法使用单一特征作为配准基元,会存在空间几何约束弱的问题。为了高精度融合跨源点云数据,充分表达场景中的立面信息,本文提出一种基于线面特征约束的跨源点云配准方法。通过RANSAC算法提取跨源点云中的同名线、面特征;利用四元数法描述空间变换参数,将线特征作为配准的约束条件,构建空间变换目标函数,估算变换相关参数完成粗配准,解决尺度差异性;在粗配准的基础上将面特征作为约束条件,求解旋转矩阵和平移参数完成精配准。以面特征代替点特征作为配准基元能避免从海量的点云数据中选取公共点,减少由人为选择的偶然误差,避免了误差的积累,进一步提高配准精度。最终使用影像匹配点云与激光雷达点云数据进行实验,结果为:在小区域单建筑、多建筑和大区域建筑群中RMSE值分别为0.364 7、0.032 0和0.614 6,且同名面之间的夹角最大不超过1.5°,最小不到0.1°,夹角角度均值在1°范围内。结果表明本文方法对具有尺度差异的跨源点云具有较好的配准效果。

李华蓉 , 毛宏宇 , 赵一 , 毕艾琳 , 陈团 , 辛伟 , 钟涛 . 线面特征约束的跨源点云配准方法[J]. 地球信息科学学报, 2024 , 26(5) : 1180 -1192 . DOI: 10.12082/dqxxkx.2024.230653
With the development of 3D sensors and 3D reconstruction techniques, the registration and fusion of cross-source point clouds have become a research hotspot. However, traditional registration methods use a single feature as the registration primitive, which leads to problems such as weak spatial geometric constraints. Combining multiple structural features with joint constraints can improve the registration accuracy to a certain extent. In order to fuse cross-source point cloud data with high accuracy and fully express the façade information in the scene, this paper proposes a cross-source point cloud registration method based on the constraints of line and surface features. Firstly, the homonymous line and plane features in the cross-source point cloud are extracted by RANSAC algorithm, which are mainly used to constrain the point cloud model in registration. Then the quaternion method is used to describe the spatial transformation parameters based on the line and surface features. The rotation and transformation in arbitrary 3D space can be realized at a faster calculation speed compared with other representations while also avoiding the gimbal lock phenomenon. The line features are used as the constraints of registration, the spatial transformation objective function is constructed, and the parameters related to the transformation are estimated to complete a coarse registration and solve the scale variability. Based on the coarse registration, the surface features are further used as the constraints to solve the rotation matrix and translation parameters to achieve a fine registration. The use of surface features instead of point features as the registration primitives can avoid the selection of common points from massive point cloud data, reducing the accidental errors selected by human selection, avoiding the accumulation of errors, and further improving the registration accuracy. Finally, experiments are conducted using the image-matched point clouds and LiDAR point cloud data for a small area and a large area to study the feasibility of this paper's method in different scales. Results show that the RMSE values for the small-area single building, multiple buildings, and large-area building clusters are 0.364 7, 0.032, and 0.614 6, respectively. The maximum angle between the homonymous surfaces does not exceed 1.5°, the minimum is less than 0.1°, and the mean value of the angle is within the range of 1°. The coarse registration based on line feature constraints can solve the scaling problem well in different scenarios, and the fine registration based on surface feature constraints can further improve the accuracy of the rotation matrix and translation parameters. These results indicate that the cross-source point cloud registration method based on line and surface feature constraints is feasible at different scales.
表1 同名线的端点数据Tab. 1 Endpoint data of homonymous lines |
| 直线 编号 | 源点云 | 目标点云 | |||
|---|---|---|---|---|---|
| 起点(x,y,z) | 终点(x,y,z) | 起点(x,y,z) | 终点(x,y,z) | ||
| Line1 | 233.725, 161.147, 364.894 | 236.280, 170.515, 363.945 | 627 279.370, 3 257 184.816, 370.310 | 627 267.899, 3 257 204.164, 370.285 | |
| Line2 | 233.725, 161.147, 364.894 | 233.444, 160.970, 359.965 | 627 279.370, 3 257 184.816, 370.310 | 627 279.070, 3 257 185.216, 357.298 | |
| Line3 | 262.091, 166.310, 362.490 | 263.862, 172.814, 361.830 | 627 316.904, 3 257 239.645, 370.275 | 627 308.376, 3 257 254.924, 370.256 | |
| Line4 | 262.091, 166.310, 362.490 | 261.740, 165.892, 357.700 | 627 316.904, 3 257 239.645, 370.275 | 627 316.649, 3 257 241.406, 357.414 | |
表2 配准变换计算结果Tab. 2 Registration transformation calculation result |
| 方案 | 旋转矩阵R | 平移参数Xt, Yt, Zt | 尺度因子s |
|---|---|---|---|
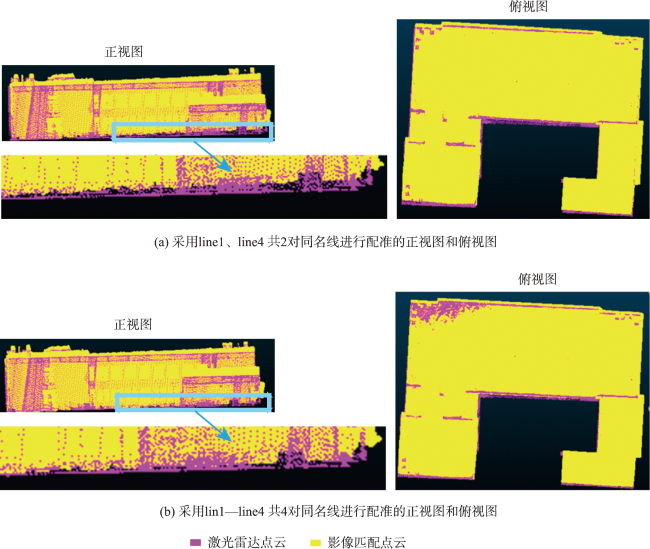
| line1、line4两对同名线 | (627 131.580, 3 256 636.70, -545.760) | 2.313 | |
| lin1—line4四对同名线 | (627 133.967, 3 256 643.900, -554.841) | 2.316 |
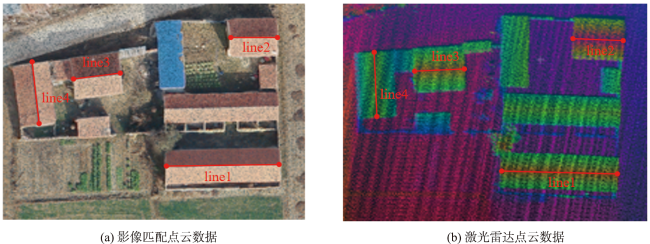
表3 小区域的同名线配准数据Tab. 3 Registration data of the same name line in a small area |
| 同名线 | 影像匹配点云配准数据 | |
|---|---|---|
| 起点(x, y, z) | 终点(x, y, z) | |
| Line1 | -4 529 044.6, 4 497 491.21, -6 191 176.73 | -4 529 051.27, 4 497 483.92, -6 191 163.17 |
| Line2 | -4 529 037.5, 4 497 498.57, -6 191 157.18 | -4 529 040.35, 4 497 495.59, -6 191 151.51 |
| Line3 | -4 529 031.2, 4 497 504.86, -6 191 179.25 | -4 529 033.5, 4 497 502.22, -6191 173.17 |
| Line4 | -4 529 026.88, 4 497 508.36, -6 191 182.75 | -4 529 032.75, 4 497 502.68, -6 191 187.53 |
| 同名线 | 激光雷达点云配准数据 | |
| 起点(x, y, z) | 终点(x, y, z) | |
| Line1 | 388 012.657 013, 3 985 690.226, 195.916 000 366 | 388 029.941 986, 3985 692.622, 195.940 002 441 |
| Line2 | 388 019.675 995, 3 985 711.128, 196.697 998 047 | 38 802 740 009, 398 571.02.112, 196.860 992 432 |
| Line3 | 387 997.558 014, 3 985 702.315, 195.942 993 164 | 388 004.470 001, 3 985 703.869, 196.001 007 08 |
| Line4 | 387 991.080 994, 3 985 703.807, 195.268 005 371 | 387 993.729 004, 3 985 694.47, 195.238 998 413 |
表4 大区域多建筑群的配准结果Tab. 4 Registration results of multiple building groups in large area |
| 配准过程 | 变换参数 | 配准结果 | ||
|---|---|---|---|---|
| 旋转矩阵 | 平移参数 | 尺度因子 | ||
| 粗配准 | 627 406.300 3 257 184.000 536.443 | 52.006 |  | |
| 精配准 | 4.770 0.718 -0.472 | 1 |  | |
表6 面与面的夹角及中心点到平面的距离Tab. 6 The angle between planes and the distance between the center point and the plane |
| 场景 | 二面角θ /(°) | ||
|---|---|---|---|
| 小区域单建筑 | 0.557 8 | 0.117 | 0.109 |
| 1.371 6 | 0.012 | 0.004 | |
| 小区域多建筑 | 1.564 1 | 0.216 | 0.216 |
| 0.381 2 | 0.177 | 0.169 | |
| 1.723 1 | 0.089 | 0.090 | |
| 大区域建筑群 | 0.092 8 | 0.649 | 0.644 |
| 0.416 4 | 0.613 | 0.604 | |
| 0.363 7 | 0.462 | 0.460 |
| [1] |
李晓斌, 林志军, 杨玺, 等. 基于激光扫描和倾斜摄影技术的三维实景融合建模研究[J]. 激光杂志, 2021, 42(8):166-170.
[
|
| [2] |
张祖勋, 陶鹏杰. 谈大数据时代的“云控制”摄影测量[J]. 测绘学报, 2017, 46(10):1238-1248.
[
|
| [3] |
|
| [4] |
危双丰, 汤念, 黄帅, 等. 基于建筑物轮廓的地面激光点云与影像匹配点云配准研究[J]. 计算机应用研究, 2021, 38(8):2515-2520.
[
|
| [5] |
王树臻. 古建筑三维点云配准及精细建模研究[D]. 济南: 山东建筑大学, 2021.
[
|
| [6] |
|
| [7] |
|
| [8] |
汤念. 影像匹配点云与地面激光点云配准技术研究[D]. 北京: 北京建筑大学, 2021.
[
|
| [9] |
俞路路. 光学影像与三维激光点云配准方法研究[D]. 淄博: 山东理工大学, 2020.
[
|
| [10] |
张靖, 江万寿. 激光点云与光学影像配准:现状与趋势[J]. 地球信息科学学报, 2017, 19(4):528-539.
[
|
| [11] |
彭澍, 李明磊, 魏大洲, 等. 城市场景中的异源点云配准方法[J]. 激光杂志, 2023, 44(10):25-31.
[
|
| [12] |
阎翔鑫, 蒋峥, 刘斌. 基于角度约束的跨源点云配准算法[J]. 激光与光电子学进展, 2023, 60(22):272-279.
[
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
张琮毅, 魏子庄, 徐昊文, 等. 尺度可变的快速全局点云配准方法[J]. 计算机学报, 2019, 42(9):1939-1952.
[
|
| [19] |
|
| [20] |
郑敏辉, 臧玉府, 梁福逊, 等. 不同场景的地面激光点云配准方法研究[J]. 测绘通报, 2015, 0(8):30-34.
[
|
| [21] |
汪千金, 崔海华, 张益华, 等. 面向光学测量跨源点云的多尺度采样配准方法[J]. 光学学报, 2022, 42(10):139-148.
[
|
| [22] |
范怡萍, 葛宝臻, 陈雷. 基于人工蜂群优化的异尺度点云配准算法[J]. 激光与光电子学进展, 2023, 60(12):246-255.
[
|
| [23] |
武鹏. 平面特征的多站地面激光雷达点云配准[J]. 测绘科学, 2016, 41(9):108-111.
[
|
| [24] |
李绕波, 袁希平, 甘淑, 等. 一种基于对偶四元素描述的线面特征约束的点云配准方法[J]. 光学学报, 2022, 42(2):167-175.
[
|
| [25] |
盛庆红, 张斌, 肖晖, 等. 直线簇约束下的地面LiDAR点云配准方法[J]. 武汉大学学报(信息科学版), 2018, 43(3):406-412.
[
|
| [26] |
王力, 李广云, 张启福, 等. 激光扫描中平面拟合及坐标转换模型构建[J]. 测绘科学技术学报, 2012, 29(2):101-104,108.
[
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}