
基于多视立体视觉与Leiden图聚类的多视图直线匹配
|
兰泽清(1999— ),男,四川绵阳人,硕士生,主要研究方向为直线匹配、三维重建。E-mail: 2263700844@qq.com |
Copy editor: 蒋树芳
收稿日期: 2024-02-04
修回日期: 2024-03-27
网络出版日期: 2024-06-25
基金资助
国家自然科学基金面上项目(41871379)
辽宁省兴辽英才计划项目(XLYC2007026)
辽宁省应用基础研究计划项目(2022JH2/101300273)
Multi-view Line Matching Based on Multi-view Stereo Vision and Leiden Graph Clustering
Received date: 2024-02-04
Revised date: 2024-03-27
Online published: 2024-06-25
Supported by
National Natural Science Foundation of China(41871379)
Liaoning Revitalization Talents Program(XLYC2007026)
Fundamental Applied Research Foundation of Liaoning Province(2022JH2/101300273)
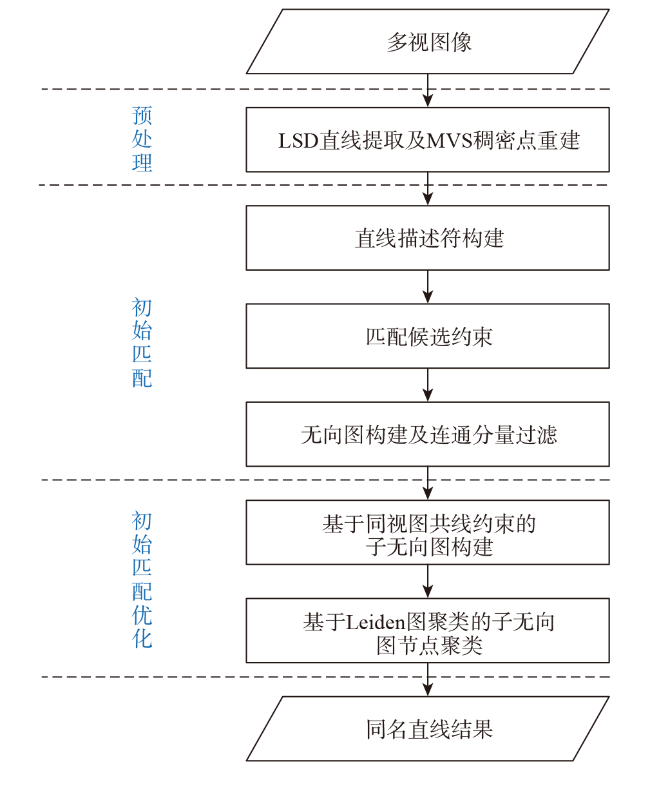
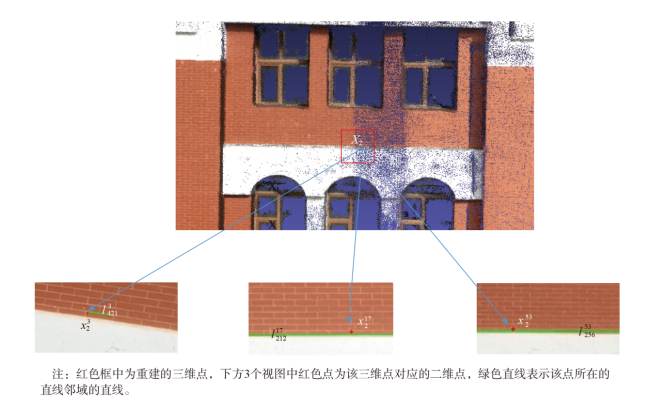
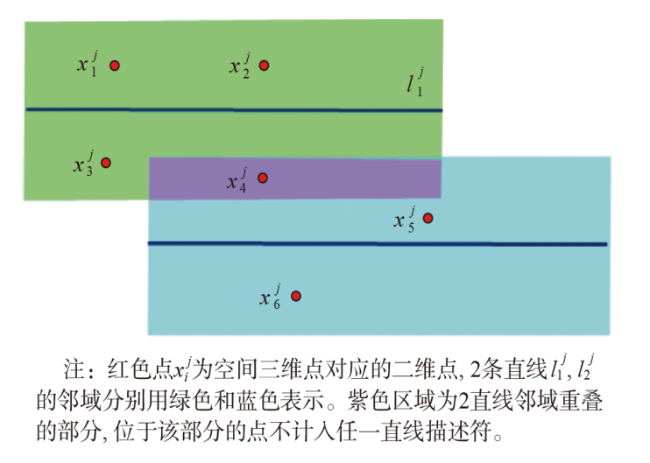
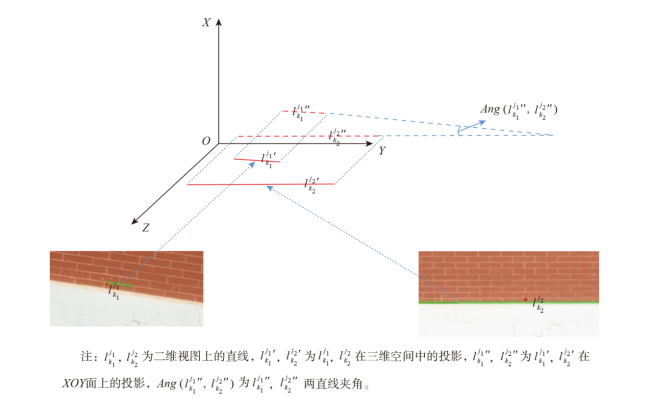
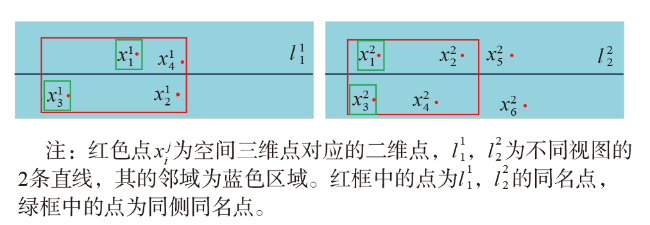
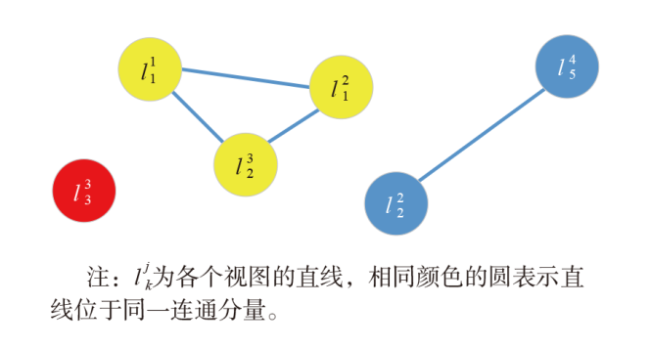
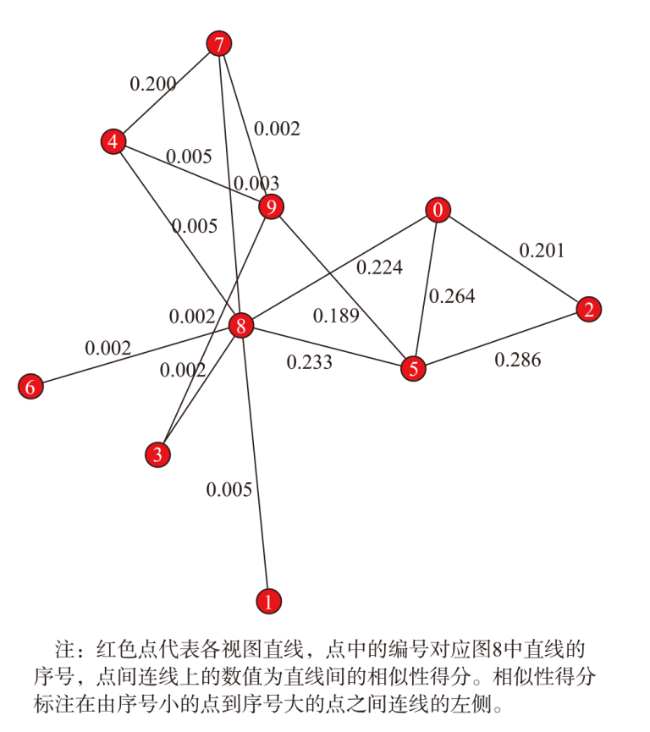
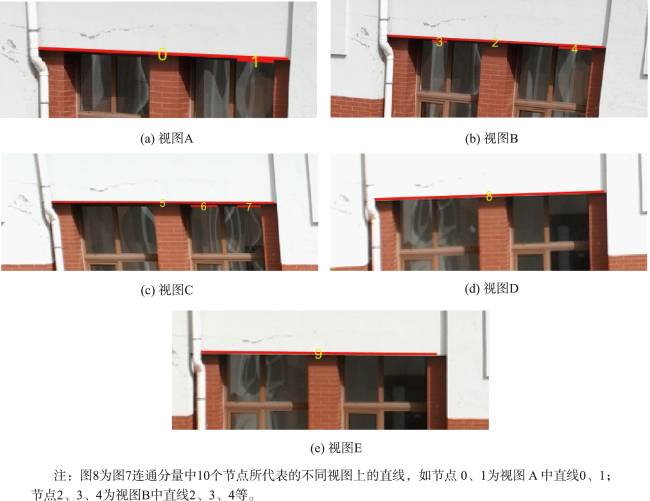
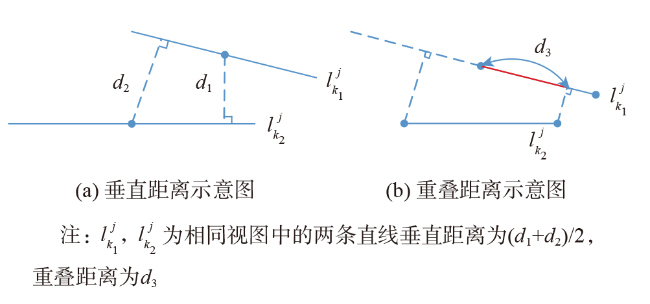
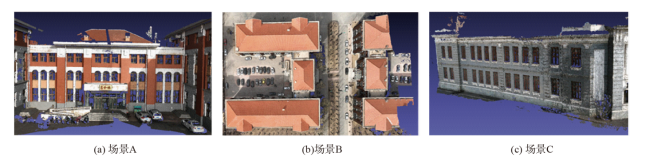
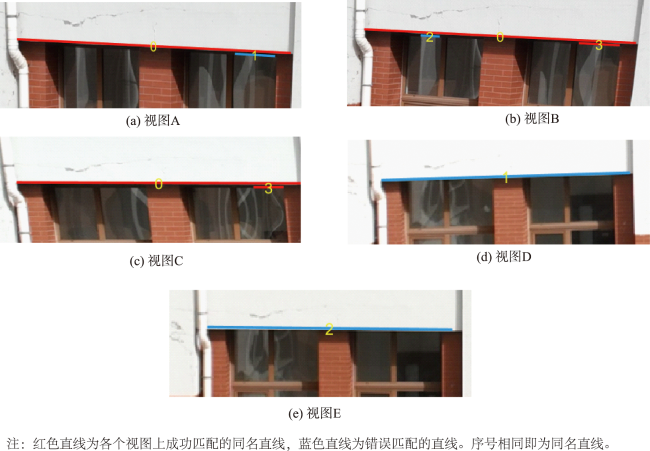
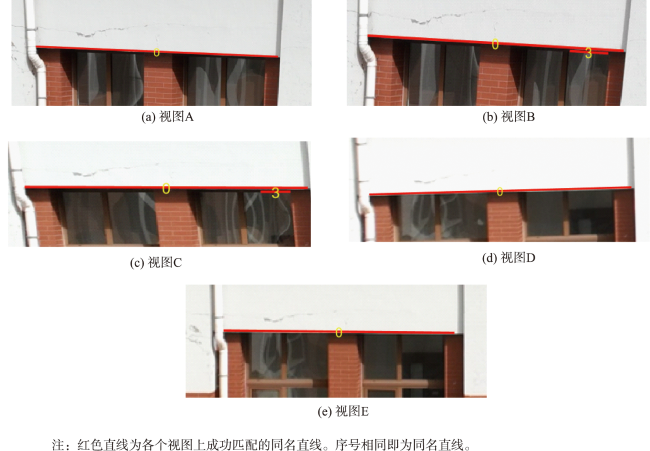
直线特征的精确匹配对三维模型的重建与优化具有重要意义。但是传统的双视图直线匹配由于视图数量较少导致直线匹配结果鲁棒性较差,且对于存在断裂的直线提取结果,同一直线在不同影像上提取直线的数目不等,导致直线匹配结果完整性较差。针对上述问题,本文提出多视图立体视觉(Multiple View Stereo, MVS)与Leiden图聚类相结合的多视图直线匹配算法。该算法首先使用直线提取算法和MVS三维重建算法对输入的多视影像分别进行直线信息提取和多视图三维信息提取,得到各视图上的直线与覆盖多视图场景的稠密三维点及其相关信息,并以此构建直线描述符;接着通过三维直线投影角度约束、点-线位置关系约束及同名点约束对匹配候选进行筛选,并根据各视图上直线间的相似性关系以各视图上的直线为节点,直线间的相似性得分为边权重构建无向图,同时剔除无向图中由单个节点构成的连通分量,得到连通分量集合,即初始匹配结果;最后对各个连通分量的节点基于同视图共线约束进行重构,得到子无向图,并对子无向图节点使用Leiden算法进行聚类。最终在多视影像上得到精确的直线匹配结果。本文选取大疆无人机拍摄的2组影像以及网上公开的1组影像进行实验。实验结果表明,采用本文算法获得的直线匹配结果较对比算法在直线匹配数目以及匹配正确率上均有所提升。

兰泽清 , 王竞雪 , 王丽芹 . 基于多视立体视觉与Leiden图聚类的多视图直线匹配[J]. 地球信息科学学报, 2024 , 26(7) : 1629 -1645 . DOI: 10.12082/dqxxkx.2024.240080
Accurate matching of line features is of paramount importance in the reconstruction and optimization of three-dimensional models. However, traditional dual-view line matching encounters challenges due to a limited number of views, resulting in suboptimal robustness in line matching. For line extraction results with breaks, the number of lines extracted for the same line on different images is different, resulting in poor integrity of straight line matching results. To address these issues, this paper proposes a multi-view line matching algorithm that combines Multiple-View Stereo (MVS) and Leiden graph clustering. The algorithm commences by employing the line extraction algorithm and the MVS three-dimensional reconstruction algorithm on input multi-view images for line information extraction and multi-view three-dimensional information extraction, respectively. This process yields lines on each view, dense three-dimensional points encapsulating the image scene, and the correspondence between object-side three-dimensional points and their corresponding image-side two-dimensional points. Building upon this foundation, the algorithm constructs line descriptors in the image domain by considering lines and their matching point sets within their neighborhoods. Subsequently, leveraging the three-dimensional line projection angle constraints, point-line position relationship constraints, and corresponding point constraints, the algorithm filters matching candidates based on these three geometric constraints. Harnessing the similarity relationships between lines on each view, an undirected graph is constructed. Here, lines on each view serve as nodes, and the similarity scores between lines act as edge weights. Simultaneously, connected components composed of single nodes are removed from the undirected graph, resulting in the set of connected components that represent the initial matching results. In the final stage of this process, nodes of each connected component are reconnected based on same-view collinear constraints, forming many sub-undirected graphs. The Leiden algorithm is then applied to cluster the nodes of these sub-undirected graphs. The clusters composed of a single node in the clustering results represent unsuccessfully matched lines, while clusters composed of two or more nodes signify the presence of corresponding lines across multiple views. Ultimately, the algorithm achieves accurate line matching on multi-view images. The experimental results show that the line matching results using the proposed algorithm are improved in terms of the number of line matches and the matching accuracy relative to other comparison algorithms.
表1 基于连通分量的直线匹配结果Tab. 1 Line matching results based on connected components |
| 方法 | 直线总数/条 | 匹配直线 数/条 | 正确匹配 直线数/条 | 正确率/% |
|---|---|---|---|---|
| 文献[13] | 10 | 9 | 5 | 55.6 |
| 本文方法 | 10 | 8 | 8 | 100.0 |
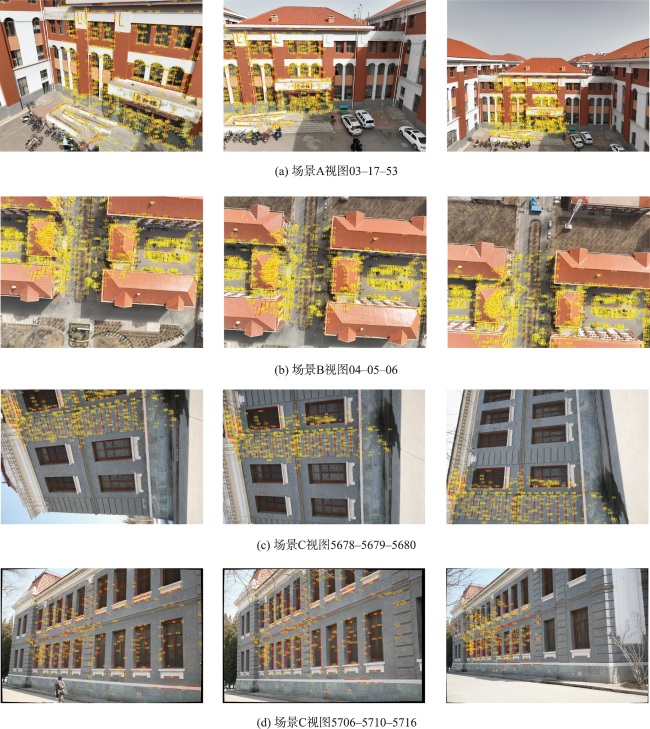
表2 直线匹配结果Tab. 2 Line matching results |
| 视图编号 | 使用方法 | 各视图提取直线数/条 | 同名直线数/条 | 正确直线数/条 | 正确率/% | |
|---|---|---|---|---|---|---|
| 场景A | 03/17/53 | 文献[13] | 8 713/5 166/4 522 | 152 | 152 | 100.0 |
| 文献[18] | 8 713/5 166/4 522 | 659 | 602 | 91.4 | ||
| 本文方法 | 8 713/5 166/4 522 | 584 | 579 | 99.1 | ||
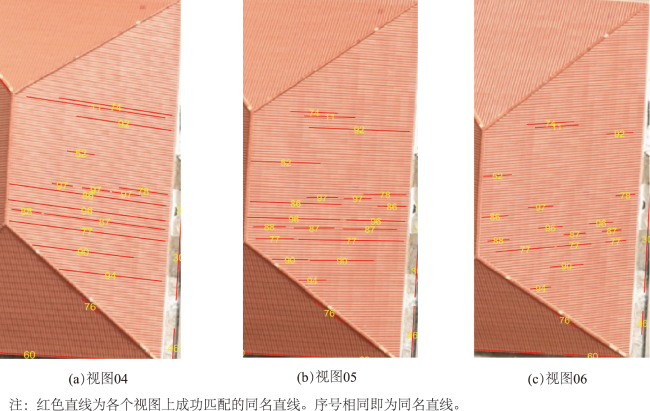
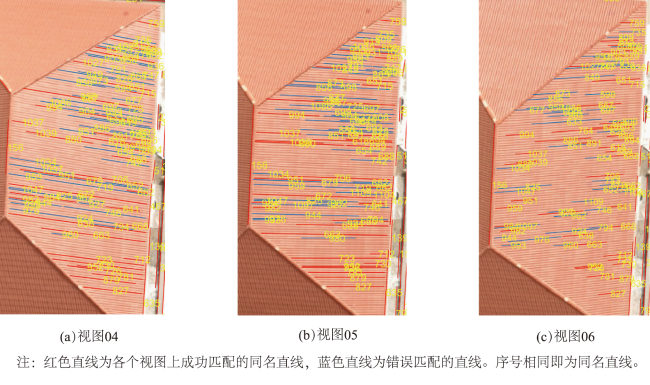
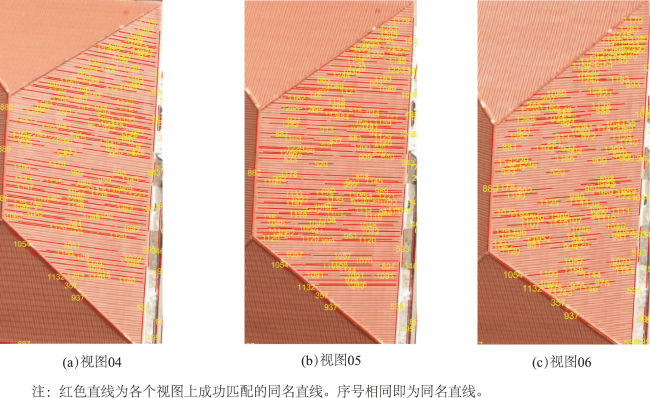
| 场景B | 04/05/06 | 文献[13] | 6 428/6 139/5 893 | 105 | 105 | 100.0 |
| 文献[18] | 6 428/6 139/5 893 | 1 129 | 1 023 | 90.6 | ||
| 本文方法 | 6 428/6 139/5 893 | 1 343 | 1 343 | 100.0 | ||
| 场景C | 5678/5679/5680 | 文献[13] | 2 904/2 909/3 031 | 14 | 14 | 100.0 |
| 文献[18] | 2 904/2 909/3 031 | 417 | 414 | 99.3 | ||
| 本文方法 | 2 904/2 909/3 031 | 439 | 439 | 100.0 | ||
| 场景C | 5706/5710/5716 | 文献[13] | 3 465/3 736/3 893 | 21 | 21 | 100.0 |
| 文献[18] | 3 465/3 736/3 893 | 439 | 394 | 89.7 | ||
| 本文方法 | 3 465/3 736/3 893 | 242 | 242 | 100.0 |
| [1] |
|
| [2] |
|
| [3] |
赵红蕊, 秦进春, 谭琪凡. 基于直线特征优化的建筑物三维重建[J]. 建筑科学与工程学报, 2022, 39(4):81-89.
[
|
| [4] |
曹林. 基于倾斜影像线特征的建筑物三维模型重建与优化方法研究[D]. 郑州: 战略支援部队信息工程大学, 2020.
[
|
| [5] |
池雨灿. 基于图像边缘特征的空间目标重建与评估方法[D]. 哈尔滨: 哈尔滨工业大学, 2019.
[
|
| [6] |
|
| [7] |
|
| [8] |
张云生, 朱庆, 吴波, 等. 一种基于三角网约束的立体影像线特征多级匹配方法[J]. 武汉大学学报(信息科学版), 2013, 38(5):522-527.
[
|
| [9] |
王竞雪, 宋伟东, 王伟玺. 同名点及高程平面约束的航空影像直线匹配算法[J]. 测绘学报, 2016, 45(1):87-95.
[
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}