
顾及分层动态区域增长的车载LiDAR点云行道树提取方法
|
关宇忻(2000— ),女,辽宁沈阳人,硕士生,主要研究方向为车载LiDAR点云数据处理。E-mail: 15542263318@163.com |
Copy editor: 黄光玉
收稿日期: 2024-02-28
修回日期: 2024-05-12
网络出版日期: 2024-07-24
基金资助
国家自然科学基金面上项目(41871379)
辽宁省兴辽英才计划项目(XLYC2007026)
辽宁省应用基础研究计划项目(2022JH2/101300273)
A Hierarchical Dynamic Region Growing Method for Extracting Street Trees from Vehicle LiDAR Point Cloud Data
Received date: 2024-02-28
Revised date: 2024-05-12
Online published: 2024-07-24
Supported by
National Natural Science Foundation of China(41871379)
Liaoning Revitalization Talents Program(XLYC2007026)
Fundamental Applied Research Foundation of Liaoning Province(2022JH2/101300273)
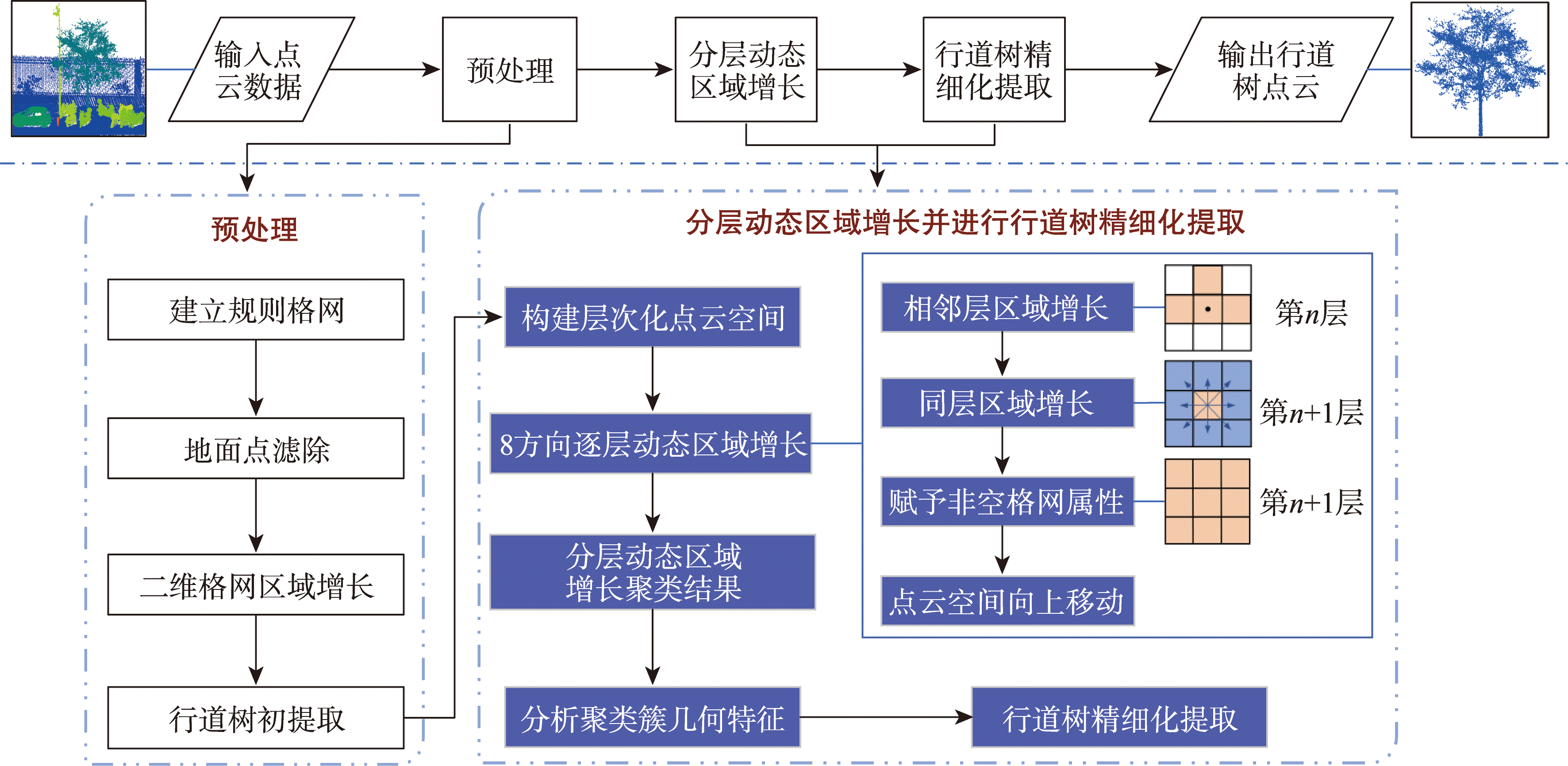
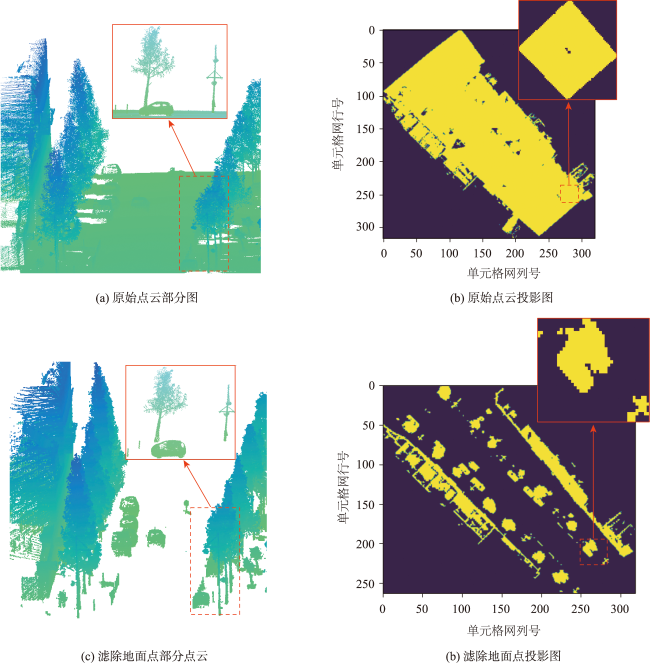
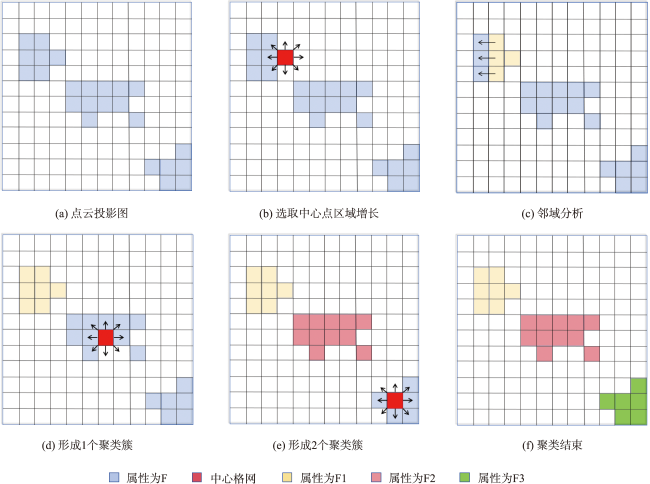
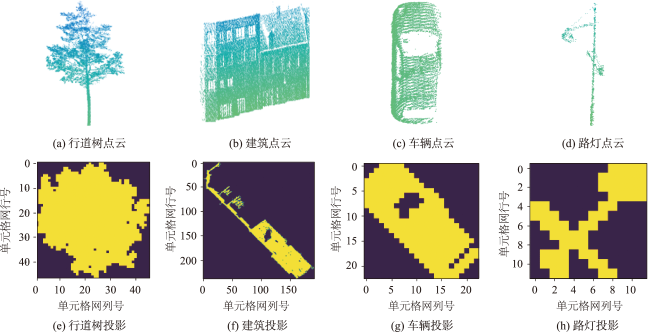
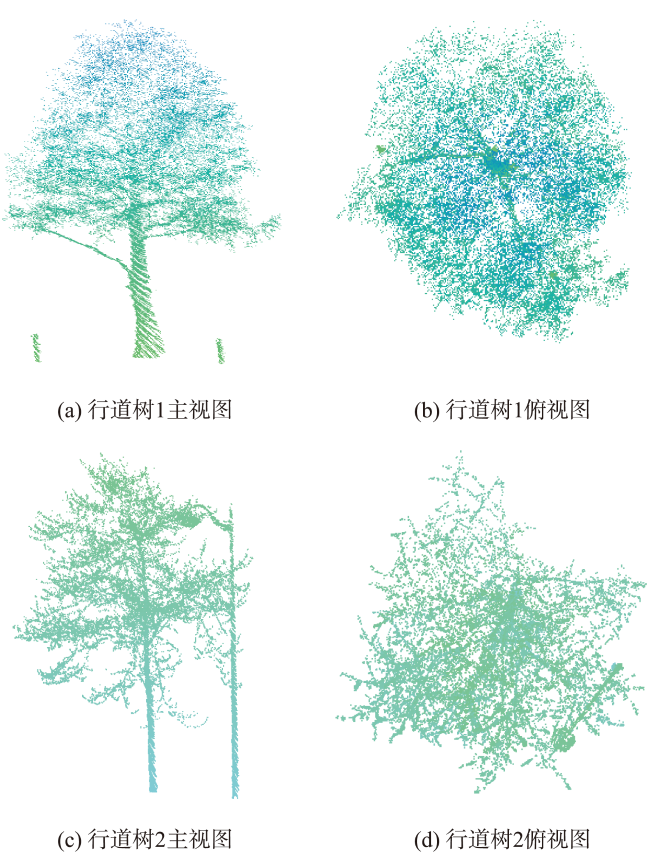
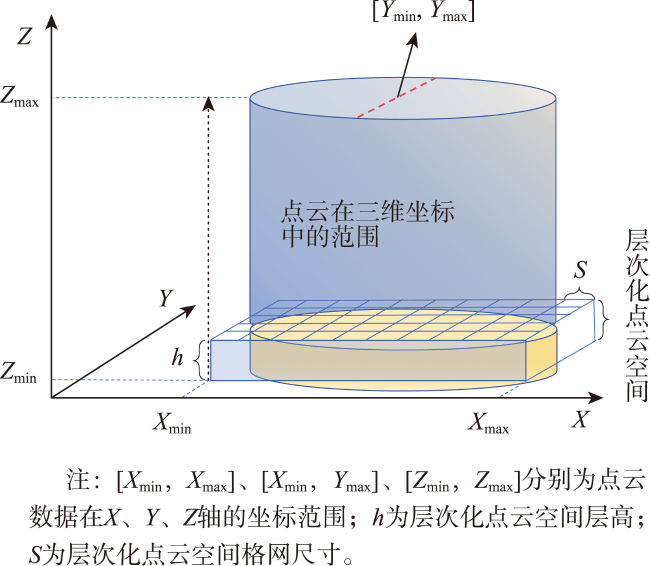
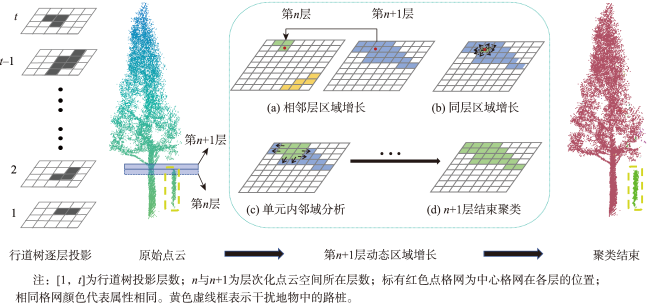
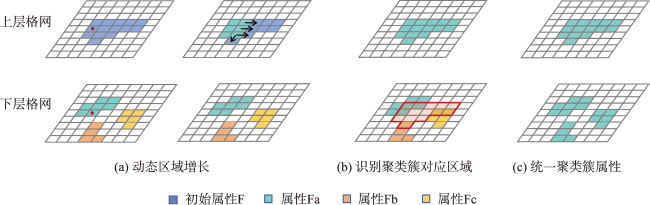
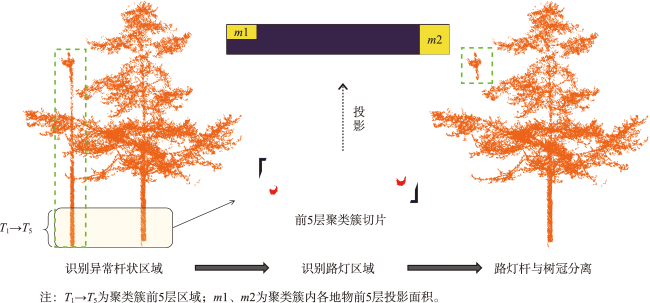
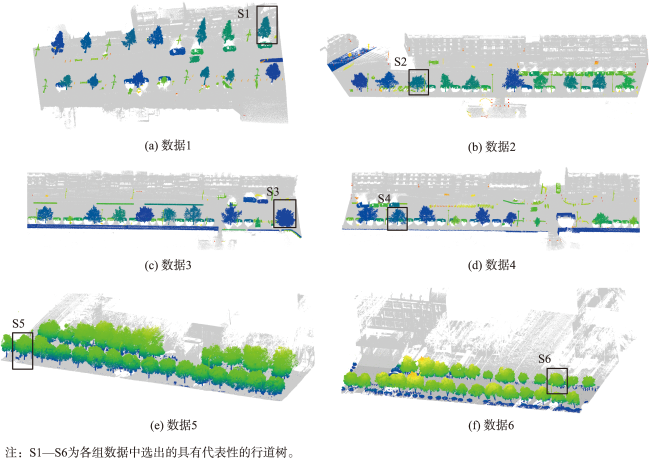
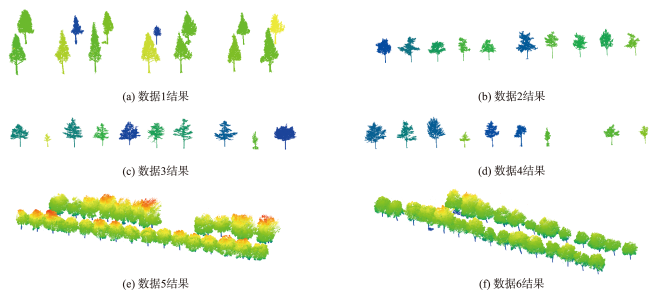
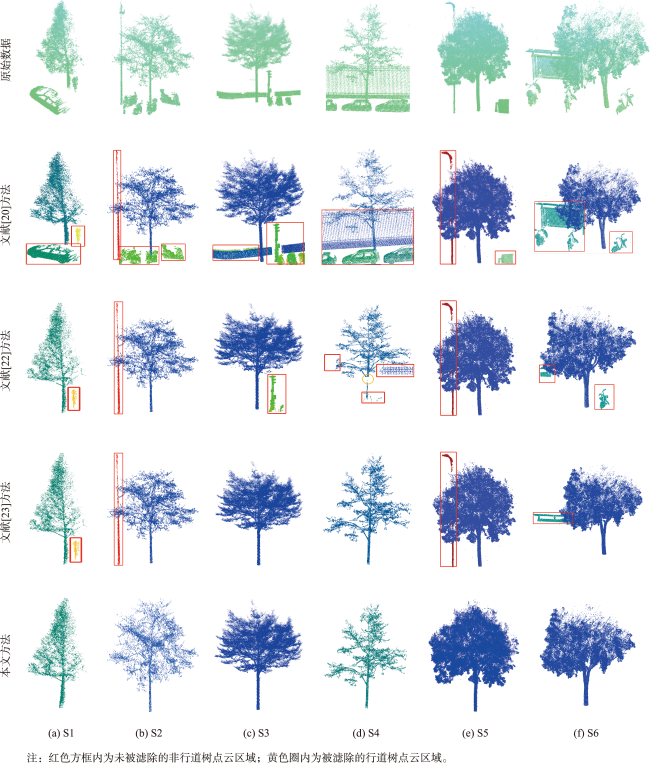
行道树的准确提取对生态园林城市建设及城市智慧化发展具有重要意义。但车载LiDAR点云数据中经常出现行道树与近邻地物相互遮掩、连接的情况,从而导致无法准确进行行道树提取。针对这一问题,本文提出一种分层动态区域增长行道树提取方法。首先,通过点云栅格化滤除地面点并根据地物投影特征进行行道树初步提取。然后,根据地物分布特征对点云数据进行等高度分层处理,构建层次化点云空间,进一步获取行道树与干扰地物信息。接着,在层次化点云空间内部进行动态区域增长,获取同一层和相邻层之间的点云属性信息,生成点云聚类簇以区分行道树与干扰地物。最后,根据干扰地 物的几何特征和行道树杆状特征,滤除干扰地物实现准确的行道树提取。本文选用激光雷达大会提供的竞赛数据及Open DataLab官网提供的里尔、巴黎两地区街道点云数据进行实验。实验结果表明,本文方法行道树提取的正确率与完整率分别在98.69与97.73之上。本文方法能够在行道树与近邻地物相互遮掩、连接的情况下实现准确完整的行道树提取。同时,本文分层动态区域增长行道树提取方法的数据适用性更强,并且可以在行道树独立性不强的情况下有效提取行道树。
关宇忻 , 王竞雪 , 许峥辉 . 顾及分层动态区域增长的车载LiDAR点云行道树提取方法[J]. 地球信息科学学报, 2024 , 26(8) : 1975 -1990 . DOI: 10.12082/dqxxkx.2024.240117
The accurate extraction of street trees is of great significance for the construction of ecological garden cities and the promotion of urban intelligence. However, in vehicle LiDAR point cloud data, there are many situations where the street tree and the adjacent ground objects, such as buildings or other vegetation, are occluded or connected to each other. These situations make it difficult to accurately extract street trees. To solve the above problems, a hierarchical dynamic region-growing method for street tree extraction was proposed in this paper. Firstly, the ground points were filtered out using the point cloud rasterization method, and street trees were preliminarily extracted according to the projection features of ground objects. Secondly, the point cloud data was stratified with equal height intervals based on the distribution characteristics of ground objects. A hierarchical point cloud space was constructed to further obtain information about street trees and interfering objects. Then, the dynamic region-growing operation was carried out in the hierarchical point cloud space, and the attribute information of the point cloud between the same layer and the adjacent layer was obtained. Based on the obtained attribute information, point cloud clusters were generated to distinguish street trees from interfering objects. Finally, the interfering objects were filtered out to achieve accurate street tree extraction using the geometric features of the interfering objects and the rod-like features of the street trees. In this paper, competition data provided by LiDAR conference and point cloud data provided by Open DataLab website were selected for our experiment. The street data of Lille and Paris from the Open DataLab website were mainly used. The experimental results demonstrate that the accuracy and completeness of the proposed method for extracting street trees are above 98.69% and 97.73%, respectively. The proposed method can achieve accurate and complete street tree extraction even when street trees and adjacent ground objects are occluded or connected with each other. Overall, the experimental results strongly support the effectiveness and reliability of the proposed method for street tree extraction. Furthermore, the hierarchical dynamic region-growing method proposed in this paper for street tree extraction demonstrates remarkable data applicability. This method exhibits a robust capacity to adapt to different datasets, making it suitable for a wide range of scenarios. Notably, even when the independence of street trees is not immediately evident, the proposed approach can still effectively extract them.
表2 实验参数设置Tab. 2 Experimental parameter settings |
| 参数 | 数值 |
|---|---|
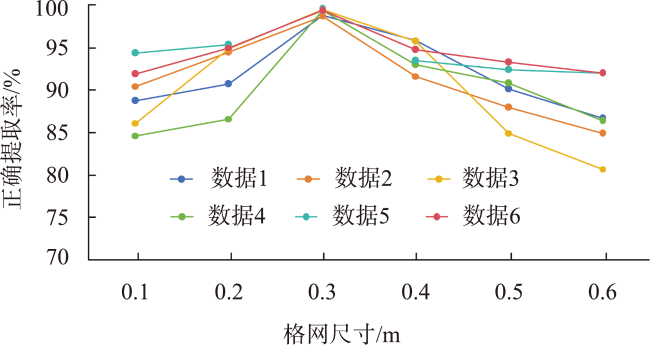
| 二维格网尺寸s/m | 0.3 |
| Z轴高度阈值Kzmin/m | 2 |
| X轴格网跨度Kx/个 | 19 |
| Y轴格网跨度Ky/个 | 18 |
| 层次化点云空间格网尺寸S/m | 0.3 |
| 层次化点云空间层高h/m | 0.2 |
表3 正确提取率Tab. 3 Correct extraction rate (%) |
| 方法 | 正确提取率RDP | |||||
|---|---|---|---|---|---|---|
| 数据1 | 数据2 | 数据3 | 数据4 | 数据5 | 数据6 | |
| 文献[20]方法 | 82.80 | 70.23 | 75.66 | 76.70 | 91.28 | 92.33 |
| 文献[22]方法 | 93.60 | 89.28 | 90.49 | 93.12 | 92.58 | 94.68 |
| 文献[23]方法 | 96.88 | 92.58 | 95.39 | 91.02 | 93.93 | 96.69 |
| 本文方法 | 98.82 | 98.69 | 99.46 | 99.36 | 99.58 | 99.37 |
表4 提取完整率Tab. 4 Extraction completeness rate (%) |
| 方法 | 提取完整率ADP | |||||
|---|---|---|---|---|---|---|
| 数据1 | 数据2 | 数据3 | 数据4 | 数据5 | 数据6 | |
| 文献[20]方法 | 88.78 | 97.63 | 95.14 | 91.37 | 98.38 | 98.90 |
| 文献[22]方法 | 97.70 | 78.39 | 88.19 | 88.45 | 95.17 | 97.78 |
| 文献[23]方法 | 98.70 | 96.49 | 95.79 | 93.89 | 98.37 | 98.09 |
| 本文方法 | 98.77 | 97.86 | 97.73 | 98.81 | 99.40 | 99.64 |
| [1] |
董彦锋, 胡伍生, 余龙飞, 等. 深度学习的街景行道树自动识别提取研究[J]. 测绘科学, 2021, 46(2):139-145.
[
|
| [2] |
张佳晖. 基于街景和LiDAR的行道树绿视面积计算研究[D]. 北京: 中国科学院大学(中国科学院遥感与数字地球研究所), 2017.
[
|
| [3] |
沈雨, 仇宇轩, 于正浩. 分部加权的行道树检测网络构建[J]. 测绘通报, 2020(2):77-81,101.
[
|
| [4] |
|
| [5] |
王可, 肖路, 田盼立, 等. 中国35个城市行道树树种组成特征研究[J]. 植物研究, 2020, 40(4):568-574.
[
|
| [6] |
杨必胜, 梁福逊, 黄荣刚. 三维激光扫描点云数据处理研究进展、挑战与趋势[J]. 测绘学报, 2017, 46(10):1509-1516.
[
|
| [7] |
杨必胜, 董震. 点云智能研究进展与趋势[J]. 测绘学报, 2019, 48(12):1575-1585.
[
|
| [8] |
尹宝才, 王文通, 王立春. 深度学习研究综述[J]. 北京工业大学学报, 2015, 41(1):48-59.
[
|
| [9] |
乔莲花, 刘民士. 融合城市行道树特征选取模型的自适应深度学习分类[J]. 测绘通报, 2020(6):77-80.
[
|
| [10] |
李佳佳, 李永强, 杨亚伦. 基于深度学习的杆状地物分类研究[J]. 测绘地理信息, 2023, 48(5):80-84.
[
|
| [11] |
方莉娜, 沈贵熙, 游志龙, 等. 融合点云和多视图的车载激光点云路侧多目标识别[J]. 测绘学报, 2021, 50(11):1558-1573.
[
|
| [12] |
|
| [13] |
|
| [14] |
汤圣君, 张韵婕, 李晓明, 等. 超体素随机森林与LSTM神经网络联合优化的室内点云高精度分类方法[J]. 武汉大学学报(信息科学版), 2023, 48(4):525-533.
[
|
| [15] |
董震, 杨必胜. 车载激光扫描数据中多类目标的层次化提取方法[J]. 测绘学报, 2015, 44(9):980-987.
[
|
| [16] |
李启才, 赵闯姓. 结合超体素和图优化的激光点云树木分割[J]. 测绘科学, 2020, 45(9):117-122,147.
[
|
| [17] |
张西童. 车载LiDAR点云中路灯与行道树信息提取研究[D]. 焦作: 河南理工大学, 2017.
[
|
| [18] |
李永强, 李鹏鹏, 董亚涵, 等. 车载LiDAR点云数据中杆状地物自动提取与分类[J]. 测绘学报, 2020, 49(6):724-735.
[
|
| [19] |
李永强, 杨莎莎, 李框宇, 等. 车载激光扫描数据中杆状地物提取[J]. 测绘科学, 2015, 40(8):42-46.
[
|
| [20] |
杨莎莎. 车载LiDAR点云中行道树信息提取研究[D]. 焦作: 河南理工大学, 2015.
[
|
| [21] |
王伟伟, 庞勇, 杜黎明, 等. 超体素约简和谱聚类结合的机载LiDAR点云单木分割[J]. 遥感学报, 2022, 26(8):1650-1661.
[
|
| [22] |
穆田宝, 吴琳娜, 张海涛, 等. 基于车载LiDAR数据的行道树信息提取及安全风险评价[J]. 林业资源管理, 2022(5):91-98.
[
|
| [23] |
陈昌鸣, 向煜, 龙川. 基于车载激光雷达的行道树提取研究[J]. 北京测绘, 2015(1):18-21.
[
|
| [24] |
董亚涵, 李永强, 孙渡, 等. 基于车载LiDAR数据的行道树信息提取与动态分析[J]. 地理与地理信息科学, 2018, 34(4):46-51,82.
[
|
| [25] |
张恒, 许君一, 刘如飞, 等. 一种基于改进区域增长的行道树点云提取方法[J]. 测绘科学技术学报, 2015, 32(2):178-182.
[
|
| [26] |
吴宾, 余柏蒗, 岳文辉, 等. 一种基于车载激光扫描点云数据的单株行道树信息提取方法[J]. 华东师范大学学报(自然科学版), 2013(2):38-49.
[
|
| [27] |
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}