
基于边折叠的实景三维模型简化算法
|
金 河(1997— ),男,宁夏中卫人,硕士生,主要研究方向为实景三维研究。E-mail: jhcgnb@163.com |
Copy editor: 蒋树芳 , 黄光玉
收稿日期: 2023-11-08
修回日期: 2024-01-20
网络出版日期: 2024-10-09
基金资助
甘肃省科技重大专项(22ZD6GA010)
国家自然科学基金项目(42261076)
国家自然科学基金项目(42061060)
兰州交通大学重点研发项目资助(LZJTU-ZDYF2301)
Mesh Simplification Algorithm for Photorealistic 3D Models Based on Edge Collapse
Received date: 2023-11-08
Revised date: 2024-01-20
Online published: 2024-10-09
Supported by
Major Science and Technology Special Project of Gansu Province(22ZD6GA010)
National Natural Science Foundation of China(42261076)
National Natural Science Foundation of China(42061060)
Key Research and Development Project of Lanzhou Jiaotong University(LZJTU-ZDYF2301)
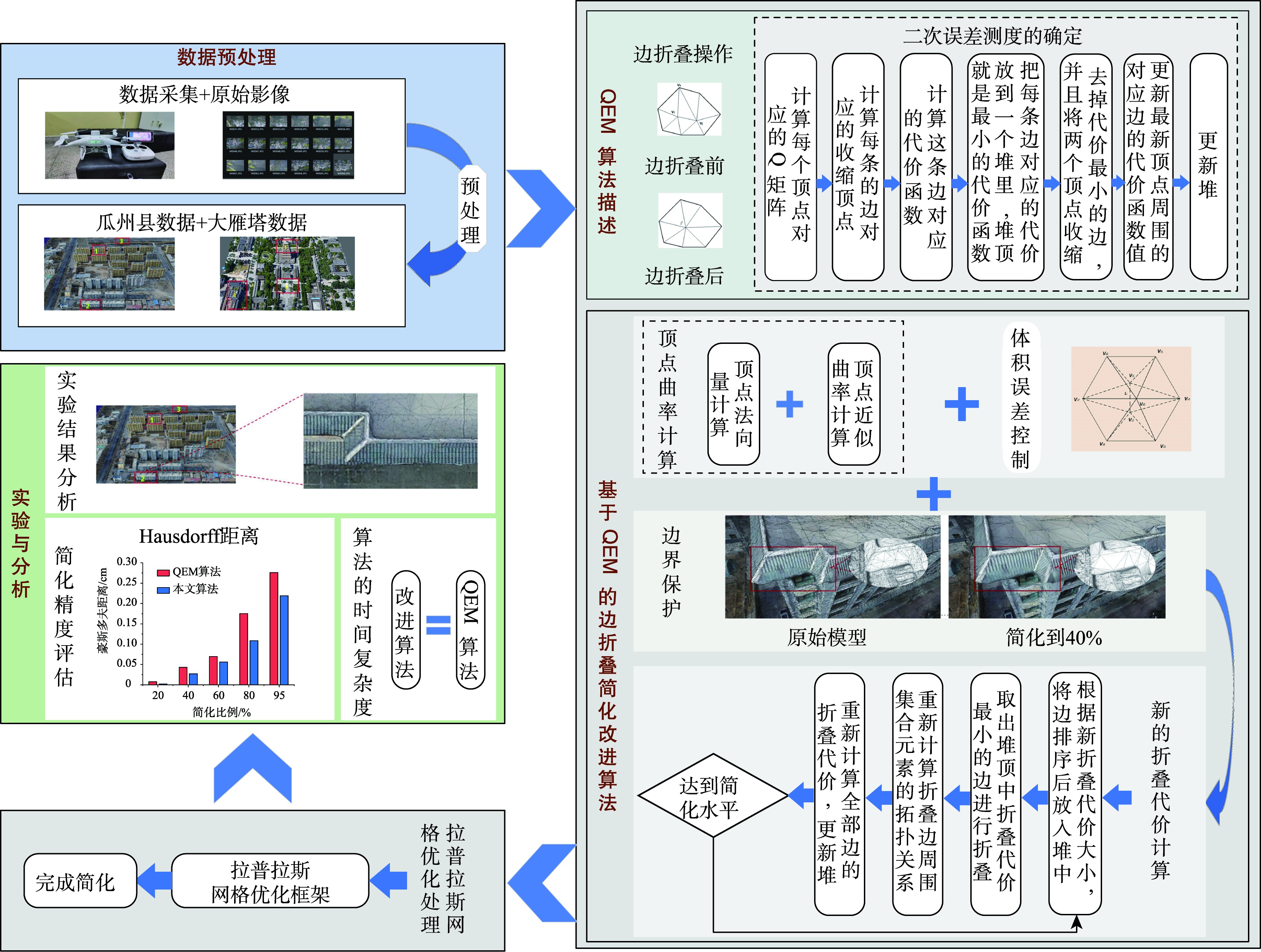
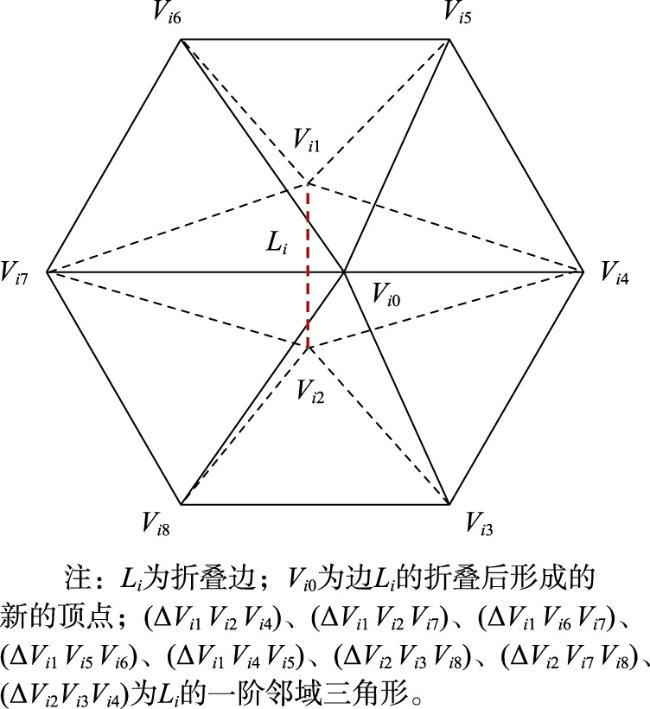
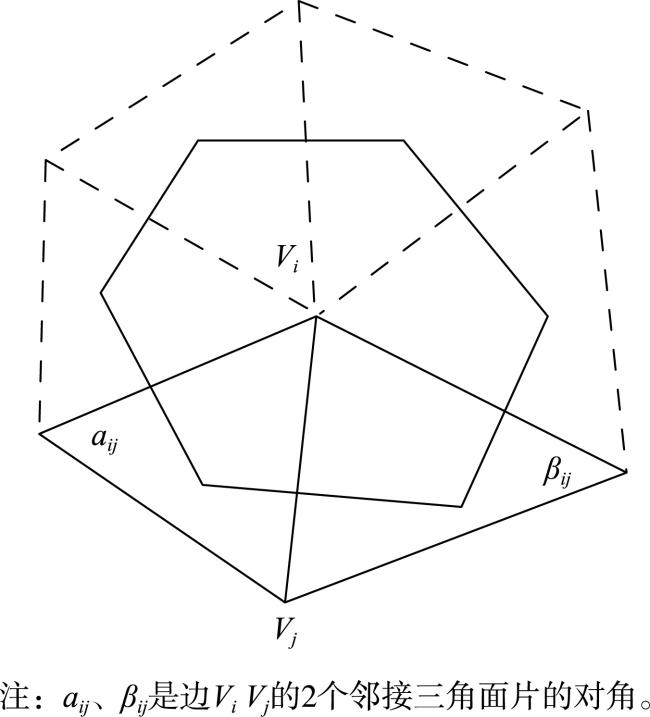
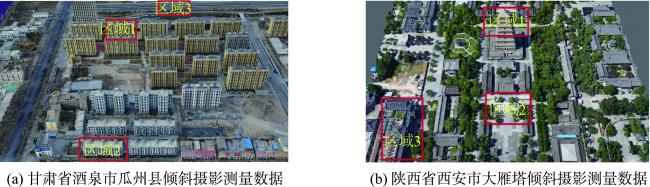
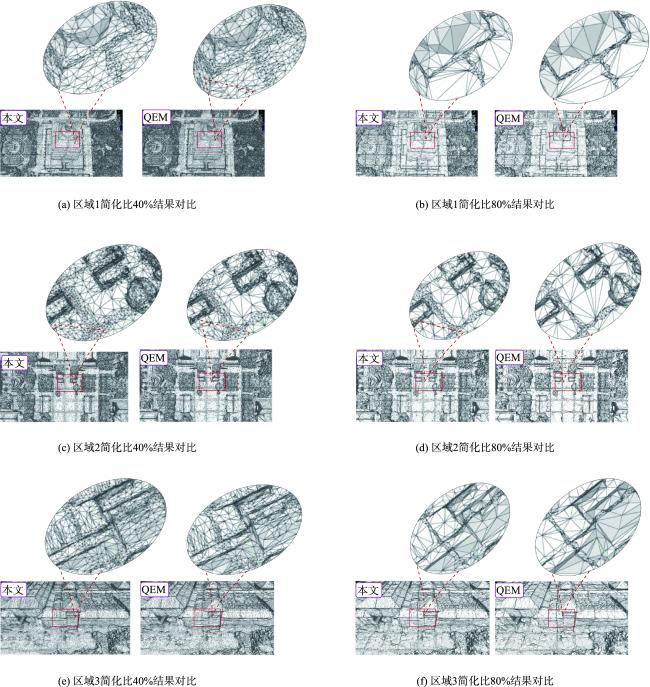
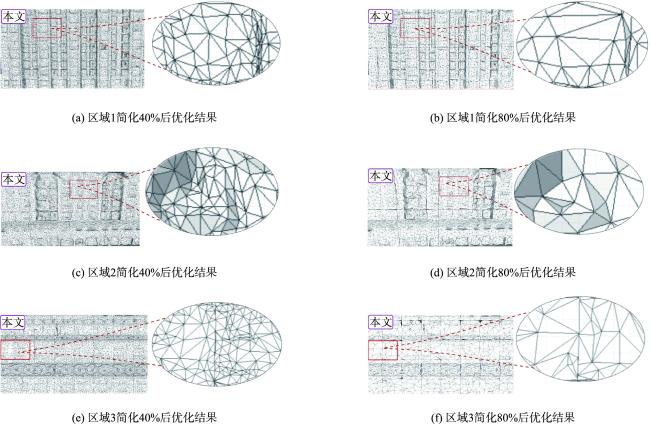
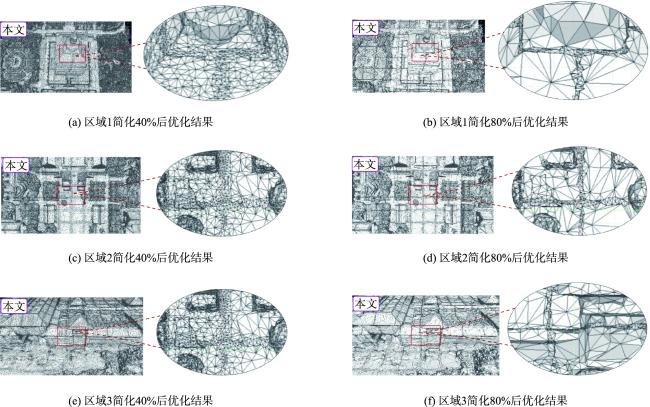
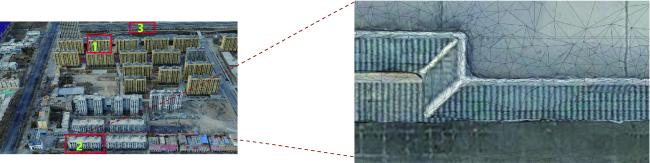
三维模型轻量化是实景三维中国建设的当务之急,对三维模型进行一定简化是较为合适的途径。在模型简化算法中,二次误差测度QEM(Quadric Error Metrics)算法是较为经典的算法。但传统的QEM算法在简化过程中没有专门的机制来保护重要细节,并且简化后模型网格质量有待进一步优化。为此,本文提出了一种基于边折叠的实景三维模型简化与优化方法,该方法中的简化算法引入了顶点近似曲率及体积误差作为约束条件,以改变边折叠代价从而使三维模型在简化的同时能够保持模型的重要细节,达到较好的简化效果。在改变边折叠代价的同时加入边界保护条件,有效保护了模型边界。最后针对简化后的网格进行了拉普拉斯网格优化处理,用于三角形形状优化和特征保持。本文使用的数据源是采用倾斜摄影测量方式采集影像并使smart3D三维重建得到的格式为OSGB的实景三维网格模型数据,使用这一数据源进行实验研究,并和经典的QEM算法进行对比。研究结果表明,本文算法很好地保留了三维模型的细节特征,同时提高了简化模型的网格质量。该算法适用于实景三维模型的轻量化。
金河 , 刘涛 , 杜萍 , 张钊 , 丁楠楠 , 陈忱 , 贾彦党 , 刘昌新 . 基于边折叠的实景三维模型简化算法[J]. 地球信息科学学报, 2024 , 26(10) : 2254 -2267 . DOI: 10.12082/dqxxkx.2024.230665
The lightweighting of three-dimensional models is a pressing need in the construction of realistic three-dimensional environments in China. Simplifying three-dimensional models to a certain extent is a suitable approach. In the realm of model simplification algorithms, the Quadric Error Metrics (QEM) algorithm is considered a classic method. However, traditional QEM algorithms lack a dedicated mechanism to preserve crucial details during the simplification process, and the post-simplification mesh quality needs further optimization. To address these challenges, this paper proposes a real-world three-dimensional model simplification algorithm based on edge collapsing. The aim is to better preserve key details and enhance the mesh quality of the simplified model in the process of three-dimensional model lightweighting. The simplification algorithm in this method introduces vertex approximation curvature and volume error as constraints, altering the edge collapsing cost to maintain important details while achieving effective simplification. By incorporating boundary preservation conditions while modifying edge collapsing costs, the algorithm effectively safeguards the model's boundaries. Finally, post-simplification mesh optimization is performed using the Laplacian mesh optimization method to optimize triangle shapes and preserve features. Experiments were conducted to verify the proposed algorithm and compare it with the traditional QEM algorithm. The research results indicate that our proposed method retains regions with rich details better than the traditional QEM algorithm, significantly reducing the number of elongated triangles and improving mesh quality. This algorithm is applicable to the lightweighting of real-world three-dimensional models, contributing to enhanced model performance and visualization effects.
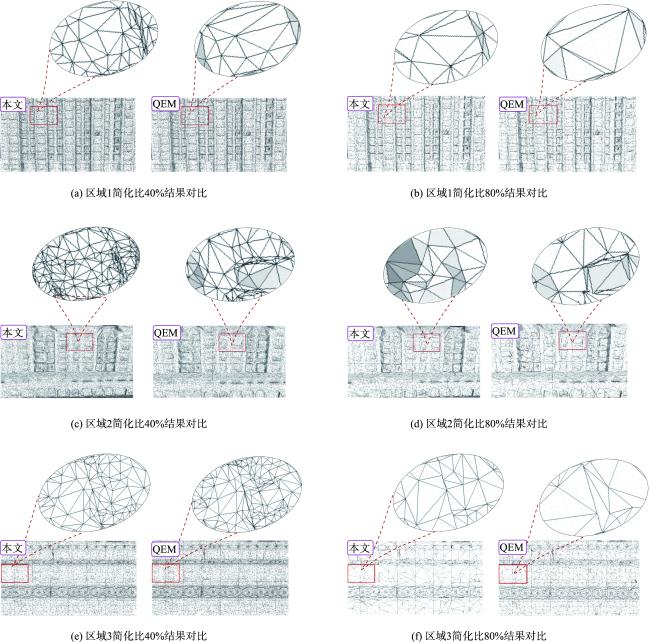
表1 瓜州县模型简化统计Tab. 1 Statistical simplification of Guazhou County Model |
| 对比项 | 本文算法 | QEM算法 | |||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 区域1 | 区域2 | 区域3 | 区域1 | 区域2 | 区域3 | ||||||||||||
| 面片数/个 | 209 041 | 69 680 | 181 429 | 60 476 | 92 329 | 30 776 | 167 232 | 55 744 | 145 143 | 48 381 | 73 863 | 5 090 | |||||
| 简化程度/% | 40 | 80 | 40 | 80 | 40 | 80 | 40 | 80 | 40 | 80 | 40 | 80 | |||||
表2 大雁塔模型简化统计Tab. 2 Statistical simplification of Big Wild Goose Pagoda Model |
| 对比项 | 本文算法 | QEM算法 | |||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 区域1 | 区域2 | 区域3 | 区域1 | 区域2 | 区域3 | ||||||||||||
| 面片数/个 | 537 645 | 179 215 | 299 388 | 99 796 | 526 355 | 175 452 | 430 116 | 143 372 | 239 511 | 79 837 | 421 085 | 140 302 | |||||
| 简化程度/% | 40 | 80 | 40 | 80 | 40 | 80 | 40 | 80 | 40 | 80 | 40 | 80 | |||||
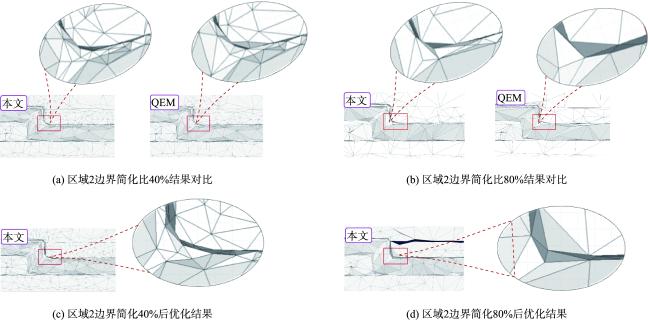
图8 瓜州县数据本文算法与QEM算法简化后效果Fig. 8 Schematic comparison of the algorithm in this paper and the simplified QEM Algorithm with Guazhou County data |
| [1] |
史与正, 陈梦华, 黄煜, 等. 实景三维模型的建筑物单体模型框架搭建[J]. 测绘通报, 2023(6):161-166.
[
|
| [2] |
王师. 基于实景三维模型创建可量测实景图片研究[J]. 测绘与空间地理信息, 2023, 46(11):81-83.
[
|
| [3] |
陈曦. 顾及多层次几何细节特征的实景三维模型轻量化可视化方法[D]. 成都: 西南交通大学, 2021.
[
|
| [4] |
王振娟, 花卫华, 刘修国, 等. 一种消除三维地质模型边界裂缝的锁边LOD方法[J]. 地球信息科学学报, 2023, 25(5):967-981.
[
|
| [5] |
张春森, 张会, 郭丙轩, 等. 城市场景结构感知的网格模型简化算法[J]. 测绘学报, 2020, 49(3):334-342.
[
|
| [6] |
李少卿, 霍亮, 沈涛, 等. 顾及角度误差的三维建筑模型边折叠简化算法[J]. 武汉大学学报(信息科学版), 2021, 46(8):1209-1215.
[
|
| [7] |
|
| [8] |
袁泽平, 徐益冰, 缪钢烽, 等. 融合边折叠与平面约束的建筑物模型简化方法[J]. 测绘科学, 2023, 48(5):191-196.
[
|
| [9] |
李鹏, 颜青松, 曲英杰, 等. 融合纹理信息的实景三维模型简化算法[J]. 测绘科学, 2021, 46(10):151-158,166.
[
|
| [10] |
陈博, 佘江峰, 谈俊忠, 等. 三维场景中建筑物模型简化研究进展[J]. 武汉大学学报(信息科学版), 2020, 45(9):1429-1437.
[
|
| [11] |
|
| [12] |
张韵, 王淑营, 郑庆, 等. 保持细节几何特征的三维网格模型轻量化算法[J]. 计算机应用, 2023, 43(4):1226-1232.
[
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
栾婉娜, 刘成明. 基于逆Loop细分的半正则网格简化算法[J]. 图学学报, 2020, 41(6):980-986.
[
|
| [17] |
|
| [18] |
刘峻, 范豪, 孙宇, 等. 结合边折叠和局部优化的网格简化算法[J]. 计算机应用, 2016, 36(2):535-540.
[
|
| [19] |
|
| [20] |
张文新, 温佩芝, 黄佳, 等. 一种改进的二次误差测度简化算法[J]. 桂林电子科技大学学报, 2015, 35(1):59-63.
[
|
| [21] |
张霞, 段黎明, 刘璐. 保持特征的高质量三角网格简化方法[J]. 计算机集成制造系统, 2014, 20(3):486-493.
[
|
| [22] |
彭育辉, 高诚辉, 何炳蔚. 三角形品质对离散点曲率的影响关系研究[J]. 中国机械工程, 2008, 19(20):2459-2462,2468.
[
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
|
/
| 〈 |
|
〉 |

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}