
结合路段和网眼结构的路网模式识别方法
|
张志义(2000— ),男,甘肃甘南藏族自治州人,硕士生,研究方向为模式识别。E-mail: 3112413048@qq.com |
Copy editor: 蒋树芳 , 黄光玉
收稿日期: 2024-07-29
修回日期: 2024-09-03
网络出版日期: 2024-10-09
基金资助
国家自然科学基金项目(42161066)
国家自然科学基金青年基金项目(41801395)
国家自然科学基金重点项目(41930101)
自然资源部城市国土资源监测与仿真重点实验室开放基金资助课题(KF-2022-07-015)
A Pattern Recognition Method for Road Network Combining Road Sections and Mesh Structures
Received date: 2024-07-29
Revised date: 2024-09-03
Online published: 2024-10-09
Supported by
National Natural Science Foundation of China(42161066)
National Natural Science Foundation of China - Youth Fund(41801395)
Key Program of Natural Science Foundation of China(41930101)
Open Fund of Key Laboratory of Urban Land Resources Monitoring and Simulation, Ministry of Natural Resources(KF-2022-07-015)
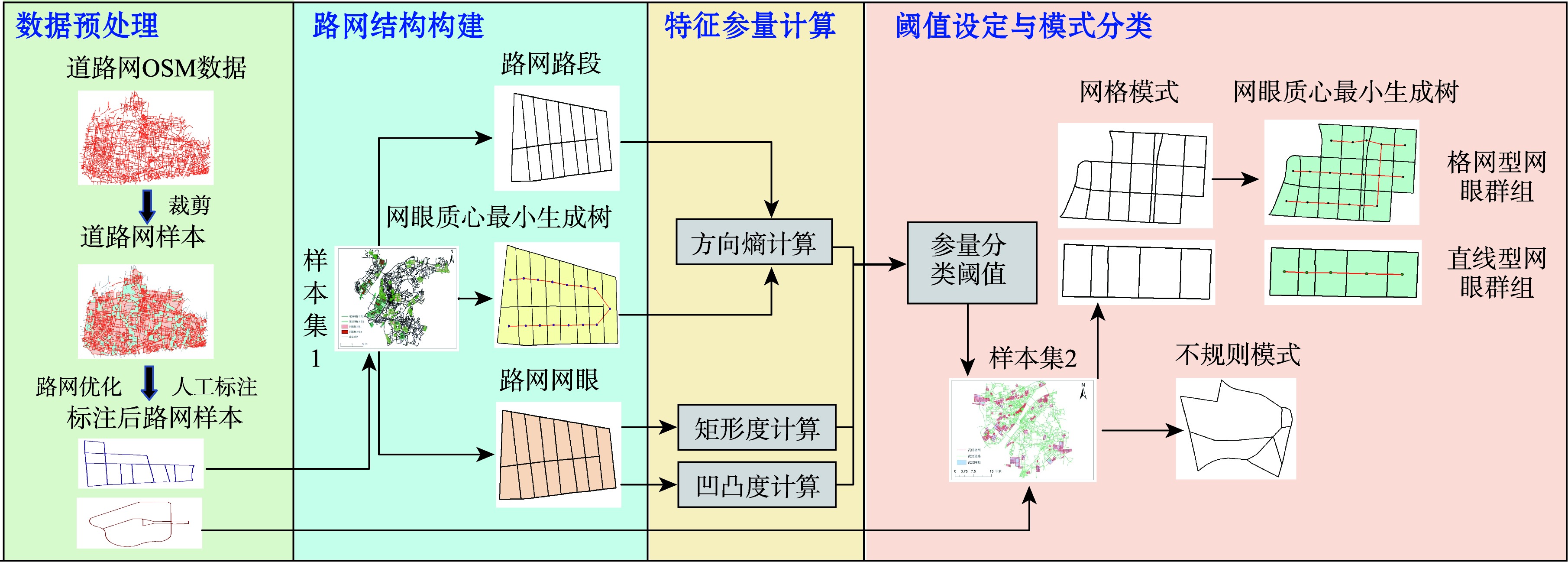
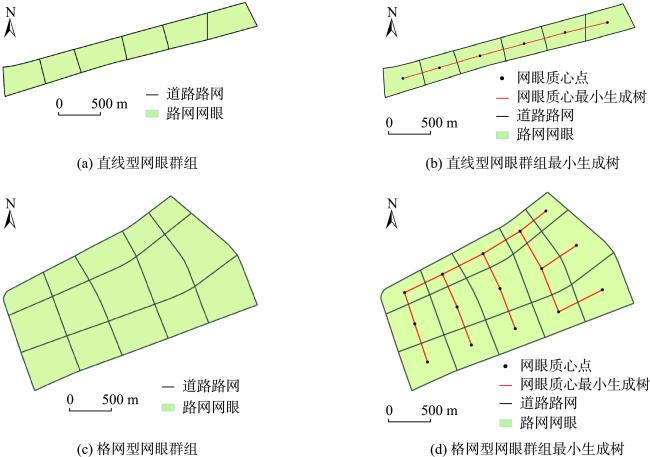
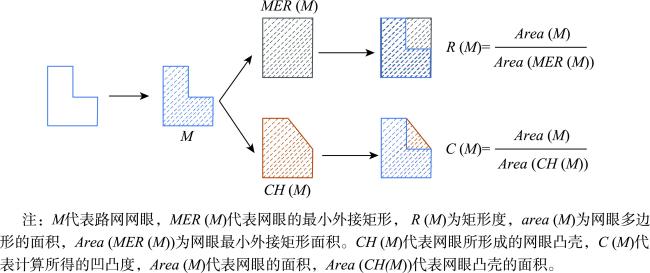
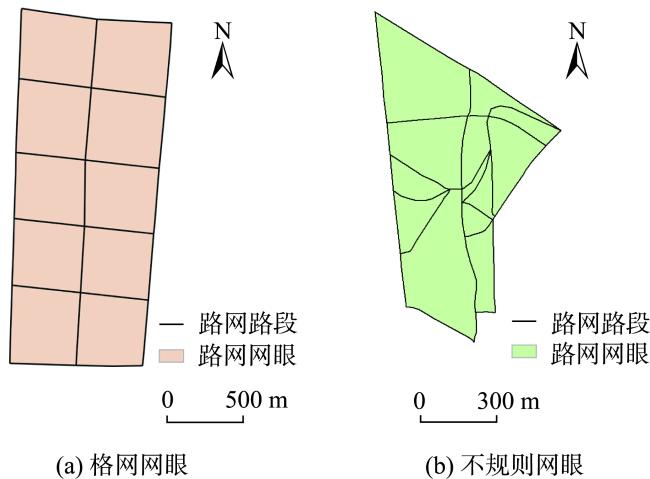
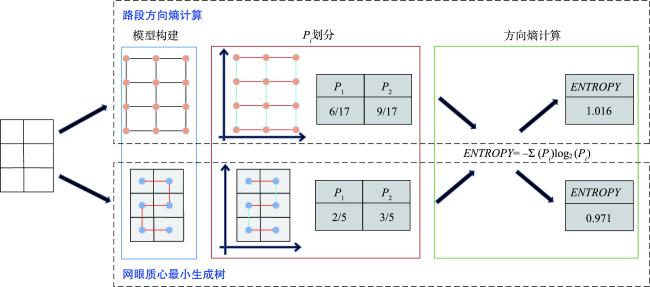
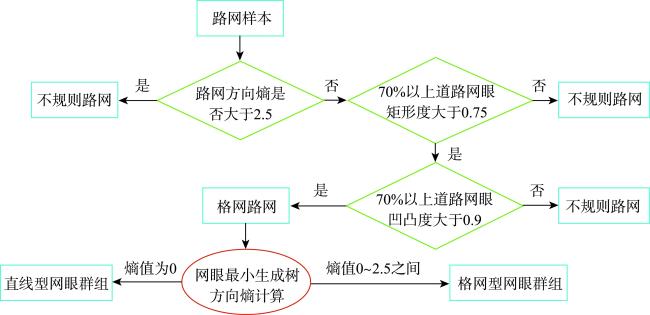
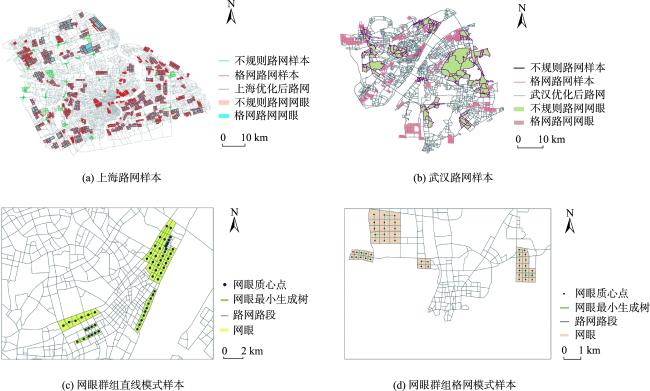
道路网具有鲜明的空间分布模式,其模式识别在地图制图、地图匹配及空间查询等诸多领域均发挥着至关重要的作用。当前的路网模式识别方法多基于网眼结构与路段结构两种模型,取得了较好的识别效果,但亦存在一定局限。已有的基于网眼的识别算法往往局限于最小单元的格网模式,无法对整体规则、局部破碎的网眼群组进行模式识别;而基于路段结构的模式识别则涉及复杂的预处理与识别过程,并且仅能识别单一的路网模式。方向熵作为信息熵的一个分支,可以较好地描述地理数据的空间分布特征和规律。为此,本文结合了网眼结构在网眼规整情况下的识别优势和路段结构在分析路段排列方式方面的优势,在此基础上引入方向熵、矩形度和凹凸度等特征参量,构建了一种有效的路网模式识别算法。本文选取多个城市路网作为实验对象,通过计算出不同路网模式相对应的参量分类阈值,实现了格网模式和不规则模式路网的模式识别,且根据格网模式路网中网眼群组排列方式的不同,构建网眼质心最小生成树并使用方向熵将其细分为直线型网眼群组和格网型网眼群组。实验结果表明,结合路段和网眼结构的路网模式识别算法的模式分类精度达到了97%以上,能够有效完成典型路网模式的识别并较好地根据网眼群组的排列方式完成了格网模式的细分。与现有路网模式识别方法比较,本文构建了一种简单快速且较为精准的路网模式识别算法,为地图综合、模式识别和城市规划等领域的后续研究和应用提供了一种新的思路。
张志义 , 禄小敏 , 宋浩然 , 闫浩文 , 王利娟 . 结合路段和网眼结构的路网模式识别方法[J]. 地球信息科学学报, 2024 , 26(10) : 2364 -2383 . DOI: 10.12082/dqxxkx.2024.240423
The road network has a distinct spatial distribution pattern, and its pattern recognition plays a crucial role in many fields such as mapping, map matching, and spatial queries. The current road network pattern recognition methods are mostly based on two models: mesh structure and road segment structure, which have achieved good recognition results, but also have certain limitations. Existing mesh based recognition algorithms are often limited to the grid pattern of the smallest unit, and cannot recognize patterns of globally regular and locally fragmented mesh groups; Pattern recognition based on road segment structure involves complex preprocessing and recognition processes, and can only recognize a single road network pattern. As a branch of information entropy, directional entropy can effectively describe the spatial distribution characteristics and patterns of geographic data. Therefore, this article combines the recognition advantages of mesh structure in the case of regular mesh and the advantages of road section structure in analyzing the arrangement of road sections. Based on this, feature parameters such as directional entropy, rectangularity, and concavity are introduced to construct an effective road network pattern recognition algorithm. This article selects the road networks of Wuhan, Shanghai, Nanjing, and Xi'an as experimental objects for sample construction. The sample sets of Nanjing and Xi'an are used to calculate the parameter classification thresholds corresponding to different road network modes and determine the road network pattern recognition rules. The sample sets of Wuhan and Shanghai are used to verify the feasibility and transferability of the algorithm proposed in this article. This method not only completes the pattern recognition of grid networks and irregular road networks, but also divides them into linear mesh groups and grid mesh groups based on the different arrangement of mesh groups in grid networks by constructing a minimum mesh centroid spanning tree and using directional entropy. The experimental results show that the pattern classification accuracy of the road network pattern recognition algorithm combining road segments and mesh structures reaches over 97%, which can effectively complete the pattern recognition of grid networks and irregular road networks, and can well subdivide grid patterns according to the arrangement of mesh groups in the grid network. The algorithm in this paper has good transferability and the recognition results are consistent with human cognition. Compared with existing road network pattern recognition methods, this paper constructs a simple, fast, and relatively accurate road network pattern recognition algorithm, providing a new approach for subsequent research in fields such as map synthesis, pattern recognition, and urban planning.
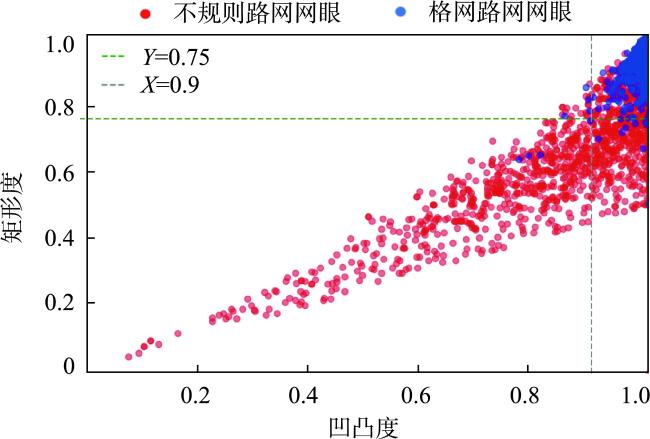
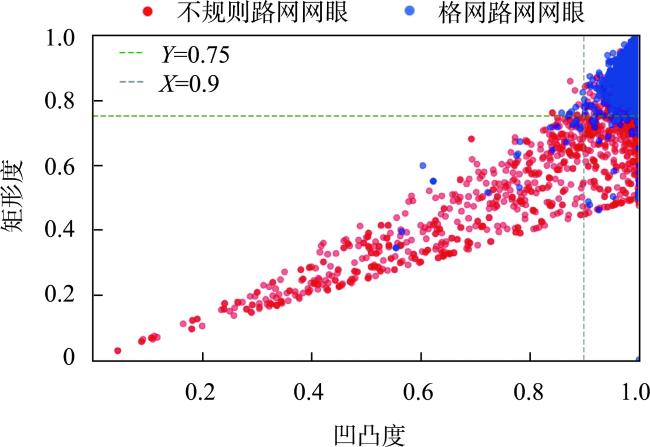
图17 路网样本矩形度凹凸度散点分布Fig. 17 Scatter distribution map of rectilinearity and concavity of road network sample |
表1 路网样本网眼矩形度凹凸度统计Tab.1 Statistics of rectilinearity and concavity of Wuhan road network sample (个) |
| 路网网眼样本 | 格网路网网眼 | 不规则路网网眼 |
|---|---|---|
| 识别出格网路网网眼 | 3 257 | 243 |
| 识别出不规则路网网眼 | 97 | 1 096 |
| 网眼总数 | 3 354 | 1 339 |
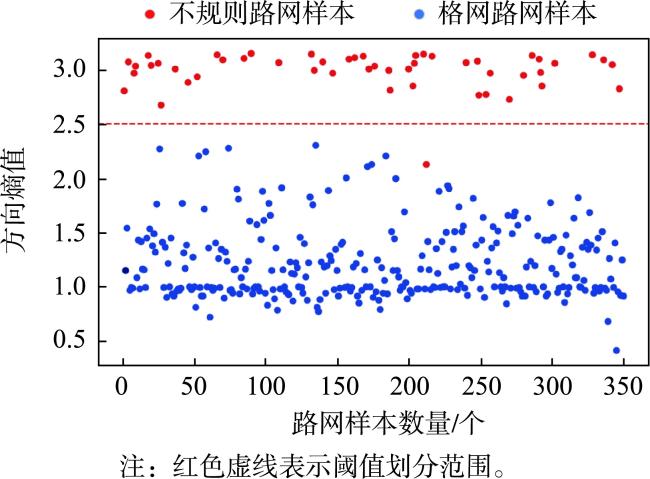
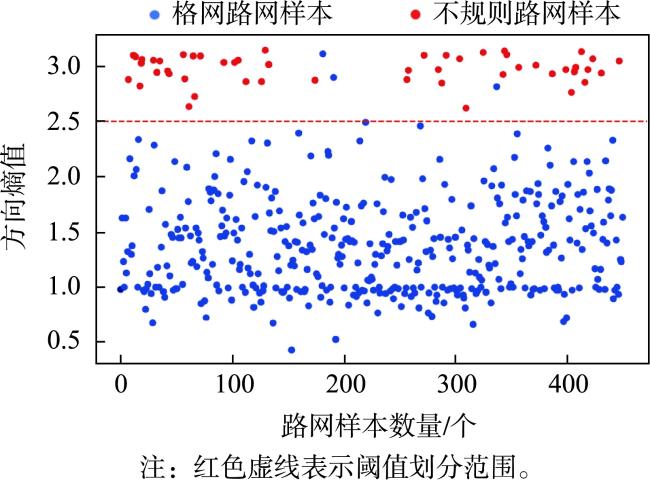
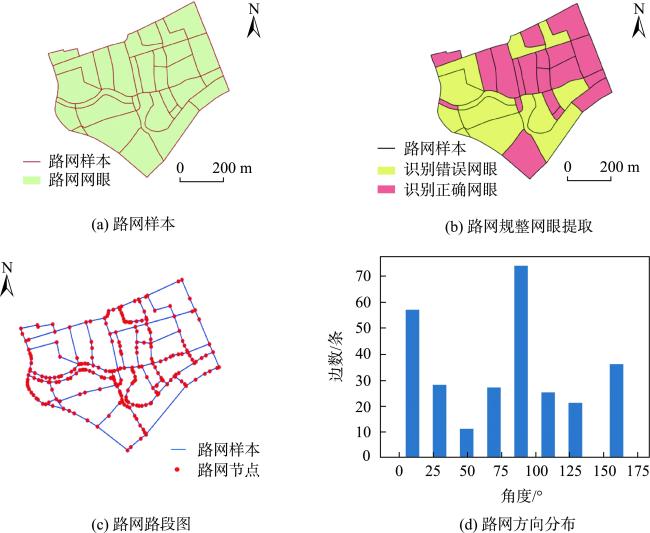
图18 路网样本方向熵散点分布Fig. 18 Scatter distribution map of directional entropy of road network |
表2 武汉路网模式划分Tab. 2 Classification of Wuhan road network patterns (个) |
| 路网样本 | 标注的格网路网 | 标注的不规则路网 |
|---|---|---|
| 格网路网 | 397 | 0 |
| 不规则路网 | 3 | 50 |
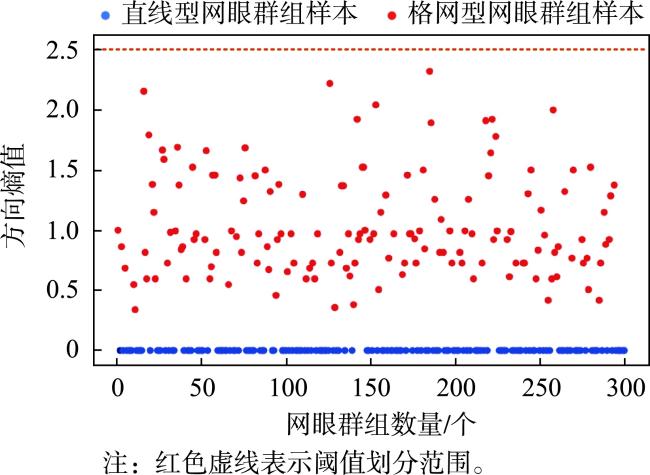
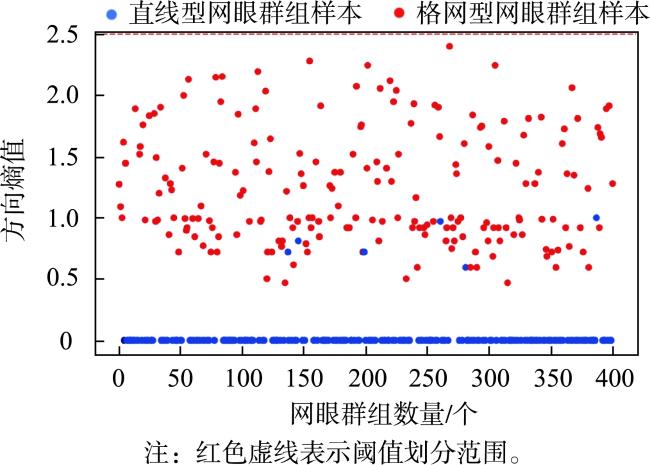
图19 样本网眼最小生成树方向熵散点分布Fig. 19 Scatter distribution map of directional entropy of sample grid minimum spanning tree |
表3 武汉网眼模式划分Tab. 3 Classification of Wuhan grid patterns (个) |
| 网眼群组样本 | 标注的直线型网眼 | 标注的格网型网眼 |
|---|---|---|
| 直线型网眼群组 | 194 | 0 |
| 格网型网眼群组 | 6 | 200 |
表4 模式分类的准确率、精确度、召回率和F1值Tab. 4 Accuracy, precision, recall, and F1 values for pattern classification (%) |
| 类型 | 准确率 | 精确度 | 召回率 | F1 |
|---|---|---|---|---|
| 格网路网 | 99.33 | 100.00 | 99.25 | 99.62 |
| 不规则路网 | 99.33 | 94.33 | 100.00 | 97.08 |
| 直线型网眼群组 | 98.50 | 100.00 | 97.00 | 98.48 |
| 格网型网眼群组 | 98.50 | 97.08 | 100.00 | 98.52 |
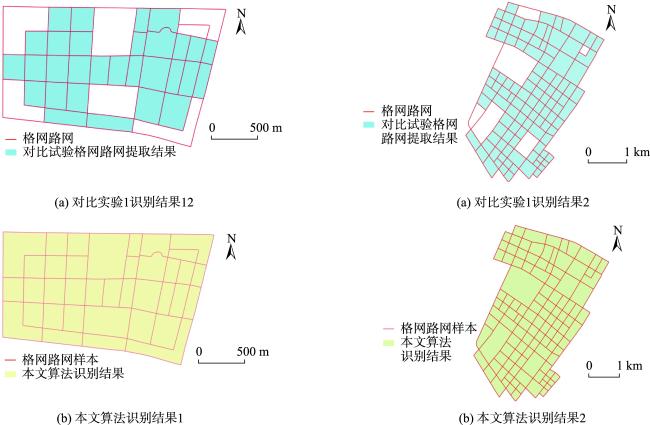
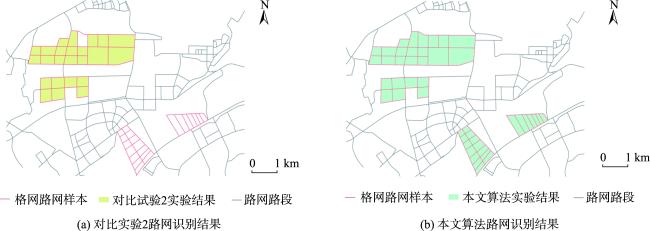
表5 对比试验格网样本识别网眼数量Tab. 5 Comparison of Experimental Results for Identifying the Number of Grids (个) |
| 实验方法 | 识别出网眼数量 | 未识别出网眼数量 | 样本网眼数量 |
|---|---|---|---|
| 对比实验1 | 992 | 112 | 1 104 |
| 对比实验2 | 1 038 | 66 | 1 104 |
| 本文算法 | 1 104 | 0 | 1 104 |
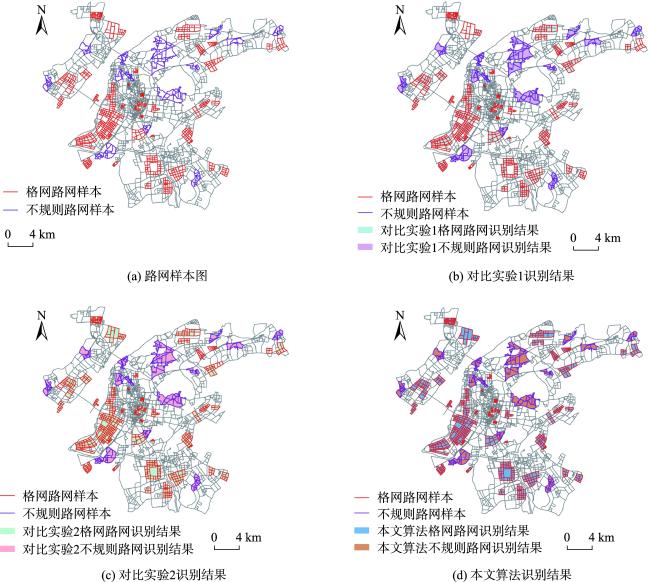
表6 对比实验识别结果Tab. 6 Comparative experimental identification results (个) |
| 类型 | 对比实验1 | 对比实验2 | |||
|---|---|---|---|---|---|
| 标注的格网路网 | 标注的不规则路网 | 标注的格网路网 | 标注的不规则路网 | ||
| 格网路网 | 75 | 5 | 77 | 3 | |
| 不规则路网 | 0 | 20 | 0 | 20 | |
表7 本文算法识别结果Tab. 7 Algorithm identification results in this paper (个) |
| 类型 | 标注的格网路网 | 标注的不规则路网 | 标注的直线型网眼群组 | 标注的格网型网眼群组 |
|---|---|---|---|---|
| 格网路网 | 80 | 0 | - | - |
| 不规则路网 | 0 | 20 | - | - |
| 直线型网眼群组 | - | - | 38 | 2 |
| 格网型网眼群组 | - | - | 0 | 40 |
表8 对比试验模式分类的准确率、精确度、召回率和F1值Tab. 8 Accuracy, precision, recall, and F1 values for the classification of comparative test modes (%) |
| 类型 | 对比实验1 | |||
|---|---|---|---|---|
| 准确率 | 精确度 | 召回率 | F1 | |
| 格网路网 | 95.00 | 93.75 | 100.00 | 96.77 |
| 不规则路网 | 95.00 | 100.00 | 80.00 | 88.89 |
| 类型 | 对比实验2 | |||
| 准确率 | 精确度 | 召回率 | F1 | |
| 格网路网 | 97.00 | 96.25 | 100.00 | 98.09 |
| 不规则路网 | 97.00 | 100.00 | 86.96 | 93.03 |
表9 本文算法模式分类的准确率、精确度、召回率和F1值Tab. 9 Accuracy, precision, recall, and F1 sore of the algorithm pattern classification in this article (%) |
| 类型 | 准确率 | 精确度 | 召回率 | F1 |
|---|---|---|---|---|
| 格网路网 | 100.00 | 100.00 | 100.00 | 100.00 |
| 不规则路网 | 100.00 | 100.00 | 100.00 | 100.00 |
| 直线型网眼群组 | 97.50 | 95.00 | 100.00 | 97.44 |
| 格网型网眼群组 | 97.50 | 100.00 | 95.24 | 97.56 |
表10 问卷调查结果Tab. 10 Survey results |
| 标号 | 标注 | 识别结果 | 符合认知程度/% | 是否匹配 | |
|---|---|---|---|---|---|
 | 1 | 不规则路网 | 不规则路网 | 100 | 是 |
 | 2 | 不规则路网 | 97.5 | 是 | |
 | 3 | 不规则路网 | 90 | 是 | |
 | 4 | 不规则路网 | 100 | 是 | |
 | 5 | 不规则路网 | 92.5 | 是 | |
 | 6 | 格网路网 格网型网眼群组 | 格网路网 格网型网眼群组 | 100 | 是 |
 | 7 | 格网路网 格网型网眼群组 | 100 | 是 | |
 | 8 | 格网路网 格网型网眼群组 | 100 | 是 | |
 | 9 | 格网路网 格网型网眼群组 | 100 | 是 | |
 | 10 | 格网路网 格网型网眼群组 | 100 | 是 | |
 | 11 | 格网路网 直线型网眼群组 | 格网路网 直线型网眼群组 | 100 | 是 |
 | 12 | 格网路网 直线型网眼群组 | 100 | 是 | |
 | 13 | 格网路网 直线型网眼群组 | 100 | 是 | |
 | 14 | 格网路网 直线型网眼群组 | 100 | 是 | |
 | 15 | 格网路网 直线型网眼群组 | 100 | 是 |
| [1] |
|
| [2] |
武芳, 巩现勇, 杜佳威. 地图制图综合回顾与前望[J]. 测绘学报, 2017, 46(10):1645-1664.
[
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
田晶, 张泊宇, 吴荡. 一种矢量道路网辐射模式识别新方法[J]. 武汉大学学报(信息科学版), 2013, 38(10):1234-1238.
[
|
| [11] |
田晶, 宋子寒, 艾廷华. 运用图论进行道路网网格模式提取[J]. 武汉大学学报(信息科学版), 2012, 37(6):724-727.
[
|
| [12] |
何亚坤, 艾廷华, 杜欣, 等. 网络空间向量剖分法识别城市路网网格模式[J]. 武汉大学学报(信息科学版), 2018, 43(1):138-144.
[
|
| [13] |
王米琪, 艾廷华, 晏雄锋, 等. 图卷积网络模型识别道路正交网格模式[J]. 武汉大学学报(信息科学版), 2020, 45(12):1960-1969.
[
|
| [14] |
田晶, 何遒, 周梦杰. 运用主成分分析识别道路网中的网格模式[J]. 武汉大学学报(信息科学版), 2013, 38(5):604-607,630.
[
|
| [15] |
田晶, 张泊宇, 杨雯雨. 对自组织映射聚类实现道路网网格模式识别[J]. 武汉大学学报(信息科学版), 2013, 38(11):1330-1334.
[
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
崔晓杰, 王家耀, 巩现勇, 等. 基于改进霍夫变换的环形交叉口识别方法[J]. 测绘学报, 2018, 47(12):1670-1679.
[
|
| [21] |
崔晓杰. 城市道路网典型空间分布模式的识别方法研究[D]. 郑州: 战略支援部队信息工程大学, 2019.
[
|
| [22] |
王米琪. 基于图卷积神经网络的道路网模式识别[D]. 武汉: 武汉大学, 2021.
[
|
| [23] |
王安东, 武芳, 巩现勇, 等. 一种城市路网多层次复合网格模式识别方法[J]. 测绘学报, 2023, 52(11):1994-2006.
[
|
| [24] |
|
| [25] |
杨必胜, 栾学晨. 城市道路网几何结构模式的自动识别方法[J]. 中国图象图形学报, 2009, 14(7):1251-1255.
[
|
| [26] |
杨亚琦, 李博雄, 杨东霞, 等. 基于信息熵的异常数据判别方法[J]. 科学技术创新, 2023(24):194-199.
[
|
| [27] |
赵夫群, 温静. 基于信息熵和改进KMC的点云简化算法[J]. 测绘工程, 2023, 32(5):7-12.
[
|
| [28] |
彭鹏, 栗坤, 王玲玲, 等. 基于极坐标直方图及方向熵的聚落街网研究——以河北鹿泉水峪村为例[J]. 重庆建筑, 2023, 22(11):23-27.
[
|
| [29] |
彭鹏, 王玲玲, 栗坤, 等. 街道极坐标直方图及方向熵在传统聚落中的应用研究——以河北井陉当泉村为例[J]. 重庆建筑, 2023, 22(10):5-9.
[
|
| [30] |
彭鹏, 王玲玲, 栗坤. 基于街道极坐标直方图及方向熵的聚落研究——以河北井陉当泉村为例[J]. 北京建筑大学学报, 2023, 39(4):9-16.
[
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}