
基于强化邻接图卷积的交叉口车辆轨迹预测模型
作者贡献:Author Contributions
齐浩轩和曹弋参与实验设计;齐浩轩和赵斌完成实验操作;齐浩轩、曹弋、赵斌参与论文的写作和修改。所有作者均阅读并同意最终稿件的提交。
QI Haoxuan and CAO Yi participated in the experimental design; QI Haoxuan and ZHAO Bin completed the experimental operations; QI Haoxuan, CAO Yi, and ZHAO Bin were involved in the writing and revision of the paper.All the authors have read the lastversion of paper and consented for submission.
|
齐浩轩(2001— ),女,辽宁辽阳人,硕士生,主要从事交通规划与管理研究。E-mail: qhx20010203@163.com |
收稿日期: 2024-12-24
修回日期: 2025-01-08
网络出版日期: 2025-03-06
基金资助
辽宁省属本科高校基本科研业务费专项资金资助项目(LJ212410150048)
2023年度辽宁省研究生教育教学改革研究项目(LNYJG2023138)
Vehicle Trajectory Prediction at Intersections Using Enhanced Adjacency Graph Convolution
Received date: 2024-12-24
Revised date: 2025-01-08
Online published: 2025-03-06
Supported by
The Fundamental Research Funds for the Provincial Universities of Liaoning(LJ212410150048)
The 2023 Research Project on the Reform of Graduate Education and Teaching in Liaoning Province(LNYJG2023138)
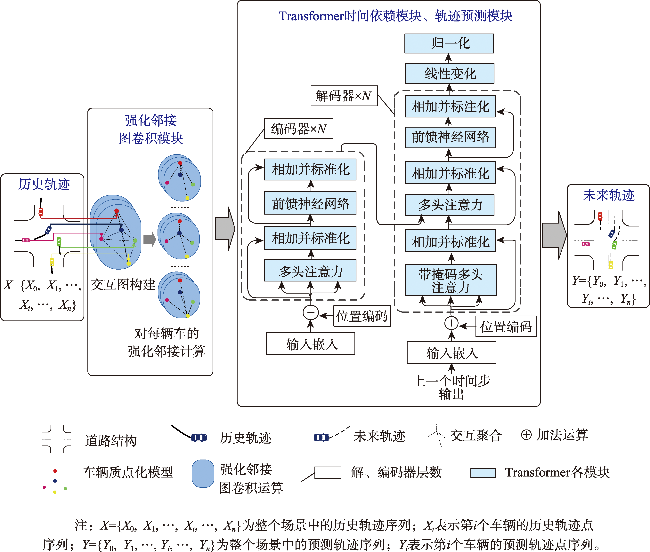
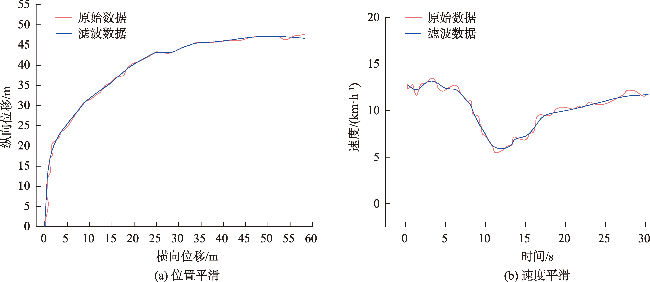
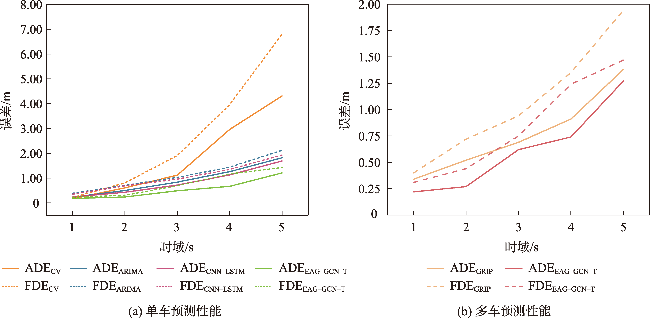
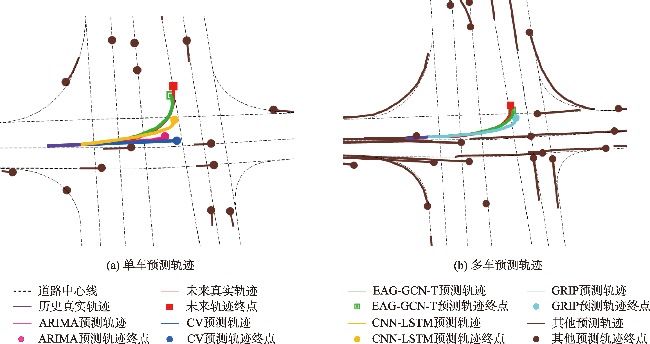
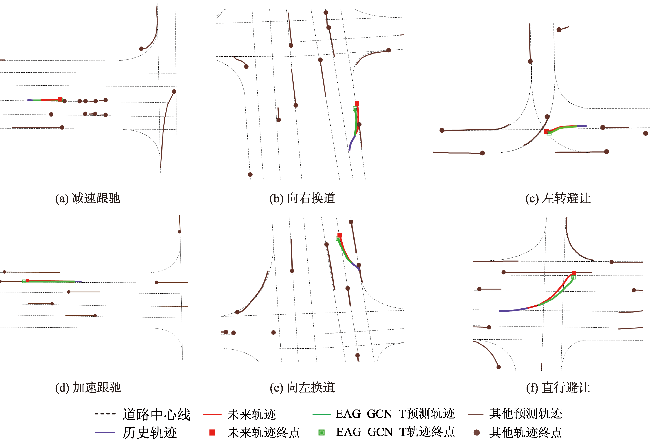
【目的】 为提高交叉口中车辆轨迹预测精度,解决交叉口多车交互场景中的轨迹预测难题。【方法】 构建强化邻接图卷积(EAG-GCN-T)的车辆轨迹预测模型,采用公共数据集INTERACTION并对数据噪声进行平滑处理,开展模型对比验证试验,与不同基准模型比较误差评估指标,验证轨迹预测精度、对比交互能力、分析泛化能力与驾驶行为识别。在模型构造上,EAG-GCN-T模型将强化邻接图卷积网络(EAG-GCN)与Transformer模型结合,EAG-GCN模块通过考虑相对速度与距离,利用强化加权邻接矩阵精确建模车辆空间交互关系,Transformer模块捕捉时间依赖性并生成未来轨迹,提升了时空预测能力。【结果】 在预测效能方面,单车轨迹长时段预测时,平均位移误差(ADE)和最终位移误差(FDE)较CV、ARIMA、CNN-LSTM分别降低69.4%、39.8%、33.3%和71.9%、32.5%、27.4%;多车交互预测中,与GRIP模型相比,FDE降低19.5%和20.6%;与3种交互机制对比,EAG-GCN-T在所有时域下总体误差最低,ADE/FDE分别为0.53和0.74,且行驶区域符合度(DCA)和轨迹点丢失率(MR)更合理,在匝道和环形交叉口适应性良好。在驾驶行为方面,模型能精准预判跟驰、变道、避让等行为及其对轨迹的影响,预测轨迹与真实轨迹高度一致。【结论】 EAG-GCN-T模型有效解决了交叉口多车交互场景中的车辆轨迹预测问题,具有高精度、强交互性和良好的泛化能力,为智能交通系统的车辆轨迹预测提供了新的解决方案。

齐浩轩 , 曹弋 , 赵斌 . 基于强化邻接图卷积的交叉口车辆轨迹预测模型[J]. 地球信息科学学报, 2025 , 27(3) : 623 -635 . DOI: 10.12082/dqxxkx.2025.240707
[Objectives] The primary objective is to enhance the accuracy of vehicle trajectory prediction at intersections and address the challenges in predicting trajectories in multi-vehicle interaction scenarios. This is crucial for improving the safety and efficiency of autonomous driving and traffic management in complex urban intersections. [Methods] An Enhanced Adjacency Graph Convolutional Network-Transformer (EAG-GCN-T) vehicle trajectory prediction model is developed. The INTERACTION public dataset is employed, with data smoothing techniques applied to mitigate noise. Model comparison and validation experiments are conducted to assess performance. The model’s accuracy is evaluated by comparing error assessment indicators against different baseline models, analyzing interaction capabilities, generalization ability, and driving behavior recognition. The EAG-GCN-T model combines an Enhanced Adjacency Graph Convolutional Network (EAG-GCN) and a Transformer module. The EAG-GCN module accurately models spatial interactions between vehicles by considering relative speed and distance using an enhanced weighted adjacency matrix. The Transformer module captures temporal dependencies and generates future trajectories, improving spatiotemporal prediction ability. [Results] In long-term single-vehicle trajectory prediction, the Average Displacement Error (ADE) and Final Displacement Error (FDE) are reduced by 69.4%, 39.8%, and 33.3% and 71.9%, 32.5%, and 27.4% respectively, compared to CV, ARIMA, and CNN-LSTM models. In multi-vehicle interaction prediction, the FDE is reduced by 19.5% and 20.6% compared to the GRIP model. Compared with three interaction mechanisms, EAG-GCN-T achieves the lowest overall error across all time domains, with ADE/FDE values of 0.53 and 0.74, respectively. EAG-GCN-T achieves more reasonable Driving Area Compliance (DAC) and Trajectory Point Loss Rate (MR), demonstrating strong adaptability in ramps and roundabouts. The model accurately predicts driving behaviors such as following, lane-changing, evasion, and their impacts on trajectories, with predicted trajectories highly consistent with actual vehicle movements. [Conclusions] The EAG-GCN-T model effectively addresses vehicle trajectory prediction in multi-vehicle interaction scenarios at intersections. It demonstrates high accuracy, strong interactivity, and excellent generalization ability. This model provides a novel solution for vehicle trajectory prediction in intelligent transportation systems, offering significant potential for advancing autonomous driving and intelligent traffic management.
表1 不同国家各场景下的实验数据详情Tab. 1 Detailed experimental data for various scenarios in different countries |
| 场景 | 地点 | 视频时长/min | 车辆数目/辆 | 视频总时长/min | 车辆数/辆 |
|---|---|---|---|---|---|
| 环形交叉口 | ① USA_Roundabout_SR | 40.90 | 965 | 365.10 | 10 479 |
| ② CHN_Roundabout_LN | 24.24 | 227 | |||
| ③ DEU_Roundabout_OF | 55.04 | 1 083 | |||
| ④ USA_Roundabout_FT | 207.62 | 7 496 | |||
| ⑤ USA_Roundabout_EP | 37.30 | 708 | |||
| 无信号交叉口 | ⑥ USA_Intersection_EP | 66.53 | 1 367 | 433.33 | 14 867 |
| ⑦ USA_Intersection_MA | 107.37 | 2 982 | |||
| ⑧ USA_Intersection_GL | 259.43 | 10 518 | |||
| 合流区 | ⑨ DEU_Merging_MT | 37.93 | 574 | 132.55 | 10 933 |
| ⑩ CHN_Merging_ZS | 94.62 | 10 359 | |||
| 信号交叉口 | ⑪ TC_Intersection_VA | 60.00 | 3 775 | 60.00 | 3 775 |
表2 单车&多车轨迹预测各时域误差(ADE/FDE)比较Tab. 2 Comparison of errors (ADE/FDE) across temporal domain for single-vehicle and multi-vehicle trajectory predictions |
| 预测视野/s | 单车预测性能(ADE/FDE) | 多车预测性能(ADE/FDE) | |||||
|---|---|---|---|---|---|---|---|
| CV | ARIMA | CNN-LSTM | EAG-GCN-T | GRIP | EAG-GCN-T | ||
| 1 | 0.18/0.23 | 0.23/0.39 | 0.24/0.35 | 0.18/0.23 | 0.34/0.40 | 0.22/0.31 | |
| 2 | 0.61/0.81 | 0.50/0.71 | 0.43/0.69 | 0.24/0.31 | 0.52/0.72 | 0.27/0.44 | |
| 3 | 1.12/1.91 | 0.84/1.03 | 0.72/0.96 | 0.49/0.69 | 0.69/0.94 | 0.62/0.75 | |
| 4 | 2.96/3.96 | 1.26/1.44 | 1.13/1.35 | 0.67/1.17 | 0.91/1.35 | 0.74/1.24 | |
| 5 | 4.31/6.81 | 1.82/2.12 | 1.69/1.93 | 1.21/1.43 | 1.38/1.94 | 1.27/1.49 | |
| 平均值 | 1.83/2.74 | 0.93/1.14 | 0.84/1.06 | 0.56/0.77 | 0.77/1.07 | 0.62/0.85 | |
| ADE/FDE降低值 | 69.4%/71.9% | 39.8%/32.5% | 33.3%/27.4% | - | 19.5%/20.6% | - | |
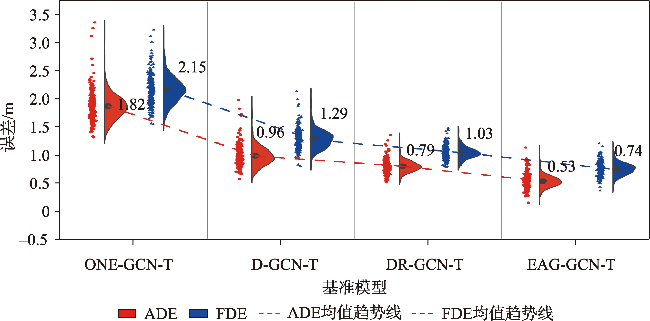
表3 不同交互机制误差对比Tab. 3 Error comparison of different interaction mechanisms |
| 基准模型 | ADE/FDE /m | MR/% | DAC/% | |||||
|---|---|---|---|---|---|---|---|---|
| 1 s | 2 s | 3 s | 4 s | 5 s | 平均值 | |||
| ONE-GCN-T | 0.45/0.81 | 0.83/1.23 | 1.65/2.04 | 2.53/3.71 | 3.66/2.97 | 1.82/2.15 | 0.365 | 0.812 |
| D-GCN-T | 0.31/0.44 | 0.49/0.78 | 0.81/1.02 | 1.18/1.36 | 2.01/2.83 | 0.96/1.29 | 0.291 | 0.886 |
| RD-GCN-T | 0.27/0.37 | 0.36/0.59 | 0.68/0.85 | 0.93/1.14 | 1.74/2.19 | 0.79/1.03 | 0.232 | 0.893 |
| EAG-GCN-T | 0.17/0.22 | 0.24/0.31 | 0.45/0.66 | 0.62/1.07 | 1.16/1.42 | 0.53/0.74 | 0.139 | 0.911 |
表4 模型泛化能力分析结果Tab. 4 Analysis results of model generalization ability (m) |
| 基准模型 | 上下匝道 | 环形交叉口 | |||
|---|---|---|---|---|---|
| ADE | FDE | ADE | FDE | ||
| CV | 1.26 | 2.54 | 2.35 | 3.12 | |
| ARIMA | 0.97 | 1.42 | 1.32 | 1.57 | |
| CNN-LSTM | 0.41 | 0.69 | 0.84 | 1.05 | |
| GRIP | 0.65 | 0.96 | 0.63 | 0.90 | |
| EAG-GCN-T | 0.41 | 0.67 | 0.61 | 0.92 | |
利益冲突:Conflicts of Interest 所有作者声明不存在利益冲突。
All authors disclose no relevant conflicts of interest.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
祝俪菱, 刘澜, 赵新朋, 等. 基于支持向量机的车辆驾驶行为识别研究[J]. 交通运输系统工程与信息, 2017, 17(1):91-97.
[
|
| [9] |
郭应时, 付锐, 赵凯, 等. 驾驶人换道意图实时识别模型评价及测试[J]. 吉林大学学报(工学版), 2016, 46(6):1836-1844.
[
|
| [10] |
|
| [11] |
邱小平, 刘亚龙, 马丽娜, 等. 基于贝叶斯网络的车辆换道模型[J]. 交通运输系统工程与信息, 2015, 15(5):67-73,95.
[
|
| [12] |
门瑞, 郭俊俊. 基于LSTM的车辆移动轨迹预测研究[J]. 专用汽车, 2024(6):70-72.
[
|
| [13] |
|
| [14] |
|
| [15] |
郭健, 杨淼禧, 骆成, 等. 基于LSTM的跨海桥梁危化品车辆行驶轨迹预测[J]. 安全与环境工程, 2023, 30(2):101-108.
[
|
| [16] |
王梦茜, 蔡英凤, 王海, 等. 基于图卷积交互网络的车辆轨迹预测方法[J]. 汽车工程, 2024, 46(10):1863-1872.
[
|
| [17] |
|
| [18] |
袁静, 夏英. 基于时空图注意力卷积神经网络的车辆轨迹预测[J]. 计算机科学, 2024, 51(12):157-165.
[
|
| [19] |
|
| [20] |
|
| [21] |
王庆荣, 谭小泽, 朱昌锋, 等. 基于门控循环单元和Transformer的车辆轨迹预测方法[J]. 汽车技术, 2024(7):1-8.
[
|
| [22] |
|
| [23] |
田晟, 胡啸. 基于Transformer模型的车辆轨迹预测[J]. 广西师范大学学报(自然科学版), 2024, 42(3):47-58.
[
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
|
| [29] |
|
/
| 〈 |
|
〉 |

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}