
月球形貌遥感测绘发展现状与未来展望
|
刘成保(1985— ),男,山东淄博人,博士,高级工程师,主要从事卫星遥感与月球形貌重建、地月空间光学数字孪生等方面的研究。E-mail: liuchengbao@csu.ac.cn |
Copy editor: 黄光玉 , 蒋树芳
收稿日期: 2024-08-23
修回日期: 2024-12-04
网络出版日期: 2025-03-25
Current Status and Future Prospects of Lunar Topographic Remote Sensing and Mapping
Received date: 2024-08-23
Revised date: 2024-12-04
Online published: 2025-03-25
【意义】月球形貌遥感测绘是保障月球探测任务安全实施和推动月球科学研究的关键手段,对于理解月球地质演化和地月系统的形成具有重要意义。【进展】近年来,随着国内外对月球探测的兴趣与投入不断增加,遥感技术的创新推动了月球形貌测绘精度和覆盖范围的显著提升,各类遥感任务获取了大量多源、多模态和多尺度的数据,为技术突破奠定了基础。然而,数据量和复杂性的急剧增加,带来了形貌测绘处理的严峻挑战。本文全面综述了月球形貌遥感测绘的发展现状,重点梳理第二次探月热潮以来月球遥感探测任务的实施与数据获取情况,系统总结了激光高度计测高、光学摄影测量以及合成孔径雷达地形测量等关键测绘技术的最新研究进展与应用。【展望】对月球形貌遥感测绘领域的发展趋势与未来可能面临的挑战进行了深入探讨和展望,针对传感器能力提升、月球绝对参考框架优化、多源数据融合精细建模、海量遥感数据智能高效处理、以及推动科学应用水平发展的前景等方面给出了建议。
刘成保 , 薄正 , 张鹏 , 周米玉 , 刘琬玥 , 黄荣 , 牛冉 , 叶真 , 杨瀚哲 , 刘世杰 , 韩东旭 , 林茜 . 月球形貌遥感测绘发展现状与未来展望[J]. 地球信息科学学报, 2025 , 27(4) : 801 -819 . DOI: 10.12082/dqxxkx.2025.240466
[Significance] Lunar remote sensing is a critical method to ensure the safety and success of lunar exploration missions while advancing lunar scientific research. It plays a significant role in understanding the Moon's geological evolution and the formation of the Earth-Moon system. Accurate lunar topographic maps are essential for mission planning, including landing site selection, navigation, and resource identification. These maps also provide valuable data for studying planetary processes and the history of the solar system. [Progress] In recent years, with growing global interest and investment in lunar exploration, remarkable progress has been made in remote sensing technology. These advancements have significantly improved the precision, resolution, and coverage of lunar topographic mapping. Various lunar remote sensing missions, such as China's Chang'e program, NASA's Lunar Reconnaissance Orbiter, and missions by other space agencies, have acquired substantial amounts of multi-source, multi-modal, and multi-scale data. This wealth of data has laid a solid foundation for technological breakthroughs. For instance, high-resolution laser altimetry, optical photogrammetry, and synthetic aperture radar have provided detailed datasets, enabling refined mapping of the Moon's surface. However, the dramatic increase in data volume, complexity, and heterogeneity presents challenges for effective processing, integration, and application in topographic mapping. This paper provides a comprehensive overview of the current state of lunar topographic remote sensing and mapping, focusing on the implementation and data acquisition capabilities of major lunar remote sensing missions during the second wave of lunar exploration. It systematically summarizes the latest research progress in key surveying and mapping technologies, including laser altimetry, which enables precise elevation measurements; optical photogrammetry, which reconstructs surface features using high-resolution imagery; and synthetic aperture radar, which provides unique insights into topographic and subsurface structures. [Prospect] In addition to reviewing recent advancements, the paper discusses future trends and challenges in the field. Key recommendations include enhancing sensor functionality and performance metrics to improve data quality, optimizing the lunar absolute reference framework for consistency and accuracy, leveraging multi-source data fusion for fine-scale modeling, expanding scientific applications of lunar topography, and developing intelligent and efficient methods to process massive amounts of remote sensing data. These efforts will not only support upcoming lunar exploration missions, such as China's manned lunar landing program scheduled for 2030, but also contribute to a deeper understanding of the Moon and its relationship with Earth.
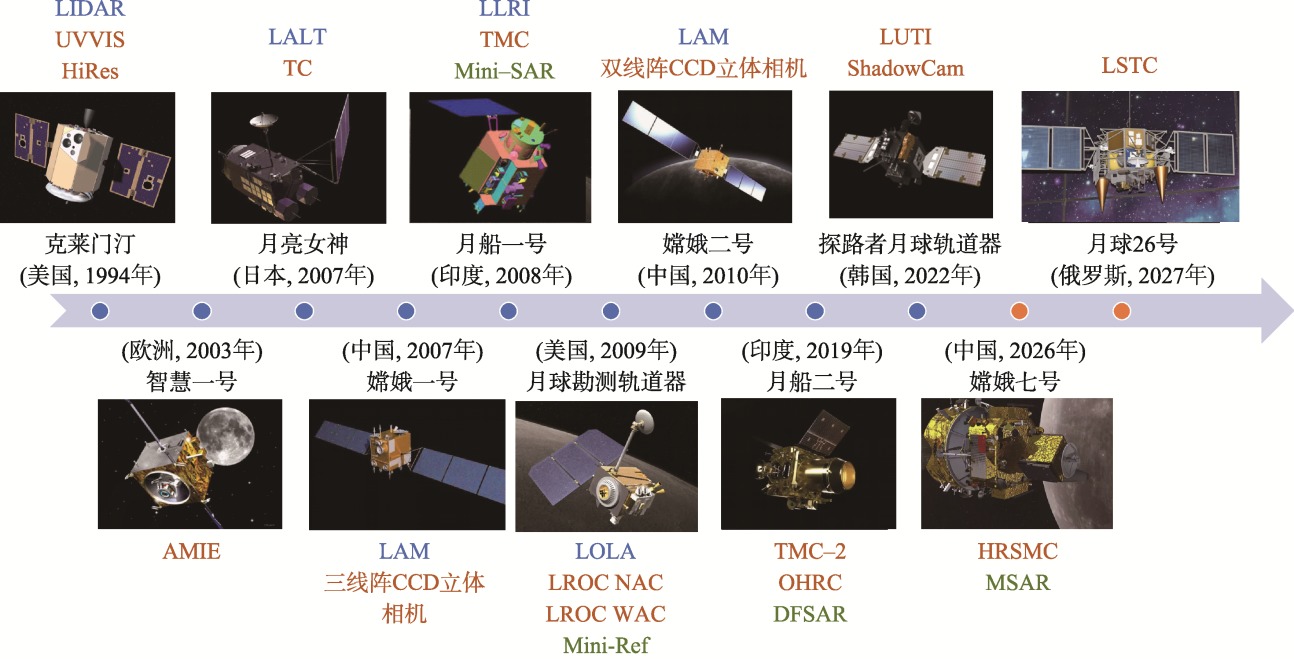
图1 第二次探月热潮以来已发射和计划发射的月球轨道器及搭载的形貌探测载荷注:蓝色字母表示激光高度计,红色字母表示光学相机,绿色字母表示合成孔径雷达。 Fig. 1 Lunar orbiter missions launched or planned and their topographic payloads since the second wave of lunar exploration |
表1 主要形貌探测载荷指标与制图产品Tab. 1 Parameters and mapping products of main topographic payloads |
| 载荷类型 | 载荷名称 | 载荷指标 | 制图产品 | ||||
|---|---|---|---|---|---|---|---|
| 测距精度 | 空间分辨率 | 产品类型 | 分辨率 | 覆盖范围 | |||
| 激光 高度计 | LIDAR[4] | 100 m | - | DEM | 7.5 km | 79º S—82.9º N[5] | |
| LALT[6] | 1 m | - | DEM | 0.5 º | 全月[7] | ||
| LAM[8] | 60 m | - | DEM | 3 km | 全月[8] | ||
| LLRI[9] | 5 m | - | - | - | - | ||
| LOLA[10] | 0.1 m | - | DEM | 1 024 ppd 5~10 m | 全月[10] 极区[11⇓-13] | ||
| 光学 相机 | UVVIS[14] | - | 100~325 m | DOM | 118 m | 全月[15] | |
| DEM | 1 km | 极区[16] | |||||
| HIRES[4,17] | - | 7~20 m | - | - | - | ||
| AMIE[18] | - | 30~250 m | DOM | 250 m | 全月[19] | ||
| TC[20] | - | 9.2~10.3 m | DOM | 10 m | 全月[21] | ||
| DEM | 10 m | 全月[21] | |||||
| CE-1三线阵立体相机[22] | - | 120 m | DOM | 120 m | 全月[22] | ||
| DEM | 500 m | 全月[22] | |||||
| TMC[23] | - | 5 m | - | - | - | ||
| LROC NAC[24] | - | 0.5~2 m | DOM | 1 m | CE-5预选着陆区[25] 85.5º S—90º S[26] 90º N—85º N[27] | ||
| DEM | 2 m | 局部[28⇓-30] | |||||
| LROC WAC[24] | - | 100 m | DOM | 100 m | 全月[31] | ||
| DEM | 118 m | 79º S—79º N [32] | |||||
| CE-2双线阵立体相机[33] | - | 1.5/7 m | DOM | 7 m | 全月[34] | ||
| DEM | 20 m | 全月[34] | |||||
| OHRC[35] | - | 0.25 m | - | - | - | ||
| LUTI[36] | - | 2.5 m | - | - | - | ||
| ShadowCam[37] | - | 1.7 m | - | - | - | ||
| SAR | Mini-SAR[38] | - | 150 m | - | - | - | |
| Mini-RF[39] | - | 30/150 m | DOM | 30 m | 70º S—90º S[40] | ||
注:ppd(pixels per degree)表示每度的像素个数。 |
表2 不同形貌遥感探测方式特点Tab. 2 Parameters and mapping products of main topographic payloads |
| 探测方式 | 激光高度计测量 | 光学摄影测量 | 合成孔径雷达测量 |
|---|---|---|---|
| 测绘精度 | 最高 | 一般 | InSAR测高精度较高 |
| 分辨率 | - | 高 | 低于光学相机 |
| 数据质量 | 相对较好 | 相对较好 | 受相干成像影响,导致散斑噪声发生,信噪比低 |
| 光照影响 | 不受影响 | 易产生阴影 | 不受影响 |
| 地形影响 | 地形起伏引起光斑直径变化,影响测距精度 | 复杂地形增加影像匹配难度,影响地形测量精度 | 侧视成像易受地形影响,可能导致遮挡、叠掩和透视收缩 |
| 数据处理难度 | 简单 | 一般 | 复杂 |
| 其他 | 激光足印的高密度覆盖所需周期长 | 需要平衡立体几何关系强弱和匹配精度的关系 | 干涉测量依赖影像相干性,需要高精度配准和有效相位解缠 |
| [1] |
童小华, 刘世杰, 谢欢, 等. 从地球测绘到地外天体测绘[J]. 测绘学报, 2022, 51(4):488-500.
[
|
| [2] |
中国载人航天. 2024年中国载人航天工程将统筹推进空间站应用与发展和载人月球探测两大任务[EB/OL]. (2024-02-19) [2024-11-21]. https://www.cmse.gov.cn/xwzx/202402/t20240229_55117.html.
[China Manned Space. 2024:China's Manned Space Program Will Coordinate Space Station Applications and Lunar Exploration)[EB/OL]. (2024-02-19) [2024-11-21]. https://www.cmse.gov.cn/xwzx/202402/t20240229_55117.html.]
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
李春来, 任鑫, 刘建军, 等. 嫦娥一号激光测距数据及全月球DEM模型[J]. 中国科学:地球科学, 2010(3):281-293.
[
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
李春来, 刘建军, 任鑫, 等. 嫦娥一号图像数据处理与全月球影像制图[J]. 中国科学D辑, 2010, 40(3):294-306.
[
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
|
| [29] |
DLR. Shackleton Crater Rim Potential Landing Site for ESA Lunar Lander DTM[EB/OL].
[ 2024-11-21. https://wms.lroc.asu.edu/lroc/view_rdr/NAC_DTM_ESALL_SR12.
|
| [30] |
|
| [31] |
|
| [32] |
|
| [33] |
赵葆常, 李春来, 黄江川, 等. 嫦娥二号月球卫星CCD立体相机在轨图像分析[J]. 航天器工程, 2012, 21(5):1-7.
[
|
| [34] |
李春来, 刘建军, 任鑫, 等. 基于嫦娥二号立体影像的全月高精度地形重建[J]. 武汉大学学报(信息科学版), 2018, 43(4):485-495.
[
|
| [35] |
|
| [36] |
|
| [37] |
|
| [38] |
|
| [39] |
|
| [40] |
|
| [41] |
|
| [42] |
|
| [43] |
|
| [44] |
|
| [45] |
|
| [46] |
|
| [47] |
|
| [48] |
|
| [49] |
|
| [50] |
|
| [51] |
欧阳自远. 嫦娥一号卫星的初步科学成果与嫦娥二号卫星的使命[J]. 航天器工程, 2010, 19(5):1-6.
[
|
| [52] |
|
| [53] |
|
| [54] |
|
| [55] |
|
| [56] |
|
| [57] |
单杰, 田祥希, 李爽, 等. 星载激光测高技术进展[J]. 测绘学报, 2022, 51(6):964-982.
[
|
| [58] |
于真真, 侯霞, 周翠芸. 星载激光测高技术发展现状[J]. 激光与光电子学进展, 2013, 50(2):020006.
[
|
| [59] |
汤国安. 我国数字高程模型与数字地形分析研究进展[J]. 地理学报, 2014, 69(9):1305-1325.
[
|
| [60] |
邸凯昌, 刘斌, 刘召芹, 等. 月球遥感制图回顾与展望[J]. 遥感学报, 2016, 20(5):1230-1242.
[
|
| [61] |
|
| [62] |
|
| [63] |
|
| [64] |
|
| [65] |
|
| [66] |
|
| [67] |
|
| [68] |
|
| [69] |
|
| [70] |
邸凯昌, 刘斌, 辛鑫, 等. 月球轨道器影像摄影测量制图进展及应用[J]. 测绘学报, 2019, 48(12):1562-1574.
[
|
| [71] |
|
| [72] |
|
| [73] |
|
| [74] |
|
| [75] |
|
| [76] |
|
| [77] |
|
| [78] |
|
| [79] |
|
| [80] |
|
| [81] |
|
| [82] |
|
| [83] |
|
| [84] |
|
| [85] |
|
| [86] |
|
| [87] |
|
| [88] |
|
| [89] |
|
| [90] |
|
| [91] |
|
| [92] |
|
| [93] |
|
| [94] |
|
| [95] |
|
| [96] |
|
| [97] |
沙洪俊, 袁修孝. 双目影像密集匹配方法的回顾与展望[J]. 武汉大学学报(信息科学版), 2023, 48(11):1813-1833.
[
|
| [98] |
尤琼华, 叶真, 童小华, 等. 基于可信度引导立体匹配的月球南极摄影测量地形重建方法[J]. 深空探测学报(中英文), 2023, 10(6):586-597.
[
|
| [99] |
彭嫚, 邸凯昌, 刘召芹. 基于自适应马尔科夫随机场的深空探测影像密集匹配[J]. 遥感学报, 2014, 18(1):77-89.
[Peng M, Di K C, Liu Z Q. Adaptive Markov random field model for dense matching of deep space stereo images[J]. National Remote Sensing Bulletin, 2014, 18(1):77-89.] DOI:10.11834/jrs.20133089
|
| [100] |
|
| [101] |
|
| [102] |
|
| [103] |
|
| [104] |
|
| [105] |
|
| [106] |
|
| [107] |
|
| [108] |
|
| [109] |
|
| [110] |
|
| [111] |
|
| [112] |
|
| [113] |
|
| [114] |
|
| [115] |
|
| [116] |
|
| [117] |
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}