
顾及阴影与视角差异的多策略融合航空影像特征匹配方法
作者贡献:Author Contributions
陈驰杰、王涛、张艳参与实验设计;陈驰杰、晏思伟完成实验操作;陈驰杰、晏思伟、赵康舜参与论文的写作和修改。所有作者均阅读并同意最终稿件的提交。
The study was designed by CHEN Chijie, WANG Tao and ZHANG Yan. The experimental operation was completed by CHEN Chijie and YAN Siwei. The manuscript was drafted and revised by CHEN Chijie, YAN Siwei and ZHAO Kangshun. All the authors have read the last version of paper and consented for submission.
|
陈驰杰(2000—),男,河南新乡人,硕士生,主要从事无人机影像匹配和三维重建研究。E-mail: 18338935313@163.com |
收稿日期: 2025-03-04
修回日期: 2025-04-16
网络出版日期: 2025-06-06
基金资助
智能空间信息国家级重点实验室基金项目(a8235)
A Multi-Strategy Fusion Method for Aerial Image Feature Matching Considering Shadow and Viewing Angle Differences
Received date: 2025-03-04
Revised date: 2025-04-16
Online published: 2025-06-06
Supported by
National Key Laboratory of Intelligent Spatial Information Fund(a8235)
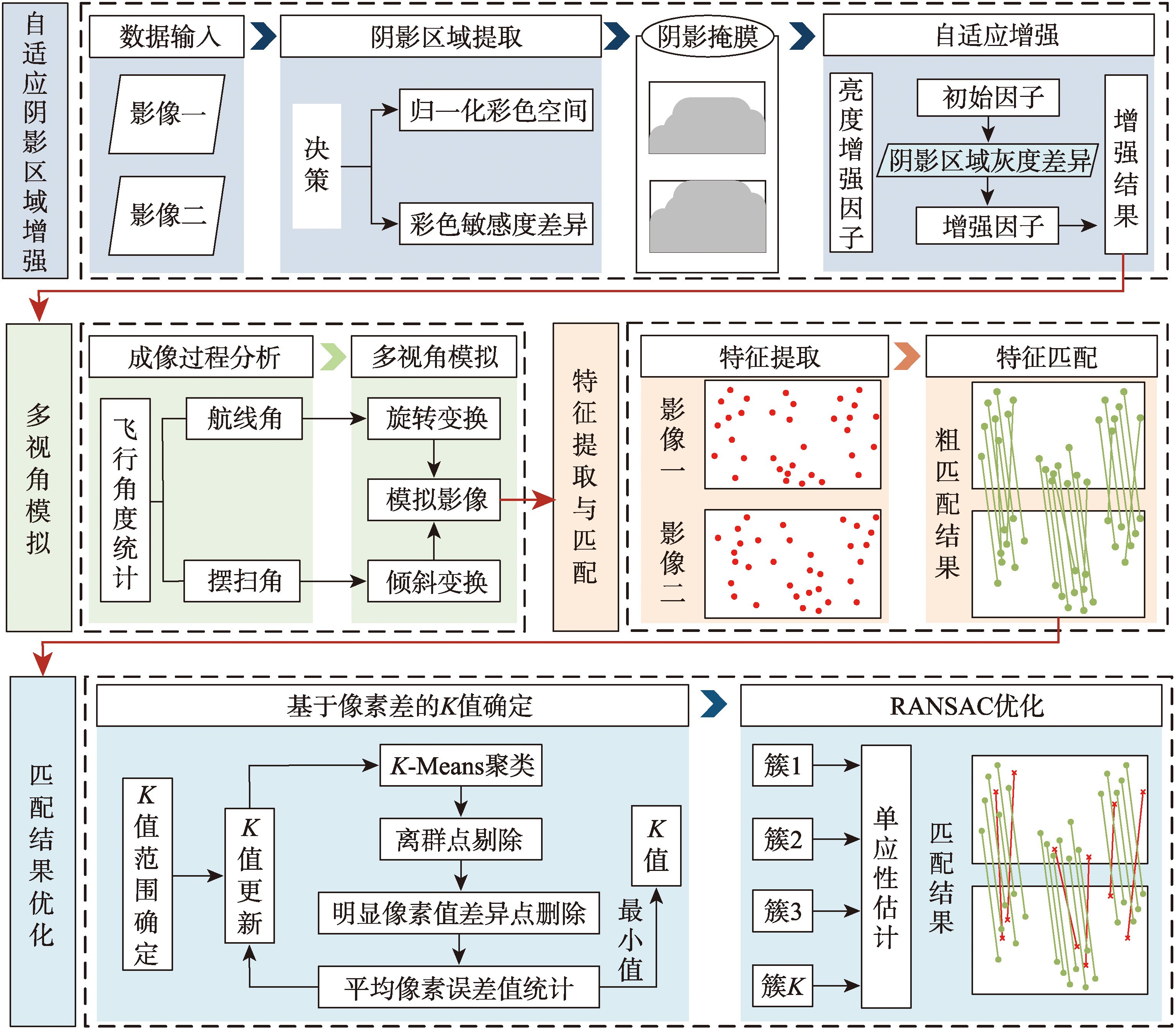
【目的】特征匹配是航空影像三维重建的核心步骤之一。然而,航空影像在成像过程中受阴影、视角变化等因素的影响导致匹配点数量少且分布不均匀。【方法】本文提出了一种顾及阴影和视角差异的多策略融合特征匹配方法,该方法结合了传统的SIFT特征提取算法和前沿的LightGlue特征匹配学习网络,通过引入多种优化策略,实现了复杂成像条件下的高质量匹配效果,主要包括以下3点改进: ① 提出了一种自适应阴影区域增强策略,通过影像原始信息提取阴影区域,利用阴影区和非阴影区平均亮度之比确定初始亮度增强因子,并根据阴影区域间的灰度差异对亮度增强因子进行改正,实现阴影区域的亮度增强处理,以恢复阴影区域的地物细节信息,提升特征点数量; ② 引入多视角模拟影像生成策略,利用相机姿态构建多视角模拟影像,以提升输入特征的视角变化适应性,提高匹配质量; ③ 设计了一种基于K-Means聚类的RANSAC匹配优化算法,根据影像的原始色彩信息动态确定聚类数K,并剔除明显色彩不一致的匹配点,利用确定的K值对匹配点进行聚类处理并对每一簇分别利用RANSAC算法进行局部优化,降低平面假设误差,获取相应的内点作为最终匹配结果。【结果】实验基于A3相机采集的航空影像数据,对影像进行单一策略和组合策略处理。实验结果表明,经过自适应阴影区域增强策略和多视角模拟策略处理后,匹配点数量相比于未处理增加了近3倍,聚类RANSAC优化策略相比于传统RANSAC优化方法的平均像素距离误差降低了约30%,匹配正确率平均提升24.8%。【结论】本文方法有效地解决了复杂成像条件下航空影像匹配困难的问题,为三维重建等下游任务提供了更加充分且可靠的数据支持。
陈驰杰 , 王涛 , 张艳 , 晏思伟 , 赵康舜 . 顾及阴影与视角差异的多策略融合航空影像特征匹配方法[J]. 地球信息科学学报, 2025 , 27(6) : 1401 -1419 . DOI: 10.12082/dqxxkx.2025.250099
[Objectives] Feature matching is a core step in the 3D reconstruction of aerial images. However, due to shadows and perspective variations during the imaging process, the number of matching points is often small and unevenly distributed, significantly affecting accuracy. [Methods] This paper proposes a multi-strategy fusion feature matching method that accounts for shadow and viewing angle differences. It combines the traditional SIFT feature extraction algorithm with the advanced LightGlue feature matching neural network. Through multiple optimization strategies, the method achieves high-quality matching results under complex imaging conditions. The main improvements include the following: (1) An adaptive shadow region enhancement strategy is proposed. Shadow regions are extracted from the original image, and an initial brightness enhancement factor is determined based on the average brightness ratio of shadow and non-shadow areas. This factor is then adjusted using the gray-level differences within the shadow regions to enhance their brightness and restore ground object details, increasing the number of feature points. (2) A multi-view simulated image generation strategy is introduced. Simulated images are generated based on camera pose information to improve the adaptability of input features to view changes, enhancing matching accuracy and robustness. (3) In the matching optimization stage, due to significant height differences in aerial images, using a planar assumption for estimation introduces large errors. To address this, A RANSAC matching optimization algorithm based on K-Means clustering is developed. The number of clusters (K) is dynamically determined using the image's original color information. Matching points are clustered accordingly, and the RANSAC algorithm is applied to each cluster for local optimization. This reduces planar assumption errors and improves the selection of inliers. [Results] Experiments were conducted using aerial image data captured by the A3 camera, testing both single and combined strategies. Results show that after applying the adaptive shadow region enhancement and multi-view simulation strategies, the number of matching points nearly tripled compared to the unprocessed data. Additionally, after K-Means clustering RANSAC optimization, the average pixel distance error decreased by approximately 30% compared to direct RANSAC optimization, and the matching accuracy improved by an average of 24.8%. [Conclusions] The proposed method effectively addresses the challenges of aerial image matching under complex imaging conditions, providing more robust and reliable data support for downstream tasks such as 3D reconstruction.
Key words: feature matching; A3 digital aerial camera; SIFT; LightGlue; aerial image; RANSAC; cluster; K-Means
利益冲突:Conflicts of Interest 所有作者声明不存在利益冲突。
All authors disclose no relevant conflicts of interest.
| [1] |
姬谕, 丁朋, 刘楠, 等. 基于改进SURF的低照度图像拼接方法[J]. 激光与光电子学进展, 2024, 61(18):1837014.
[
|
| [2] |
魏休耘, 甘淑, 袁希平, 等. 基于边缘响应优化SIFT算法在无人机影像匹配中的研究[J]. 测绘工程, 2024, 33(6):1-10.
[
|
| [3] |
张昆, 王涛, 张艳, 等. 一种基于面阵摆扫式航空影像的特征匹配方法[J]. 地球信息科学学报, 2022, 24(3): 522-532.
[
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
张胜国, 聂文泽, 饶维冬, 等. 基于重叠区域改进SURF的无人机影像快速匹配算法[J]. 无线电工程, 2024, 54(8):1978-1985.
[
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
佟国峰, 李勇, 刘楠, 等. 大仿射场景的混合特征提取与匹配[J]. 光学学报, 2017, 37(11):215-222.
[
|
| [19] |
岳娟, 高思莉, 李范鸣, 等. 具有近似仿射尺度不变特征的快速图像匹配[J]. 光学精密工程, 2020, 28(10):2349-2359.
[
|
| [20] |
王焱, 宋宇超, 吕猛. 基于改进算法的航拍图像匹配方法[J]. 计算机仿真, 2020, 37(2):258-262.
[
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
侯义锋, 丁畅, 刘海, 等. 逆光海况下低质量红外目标的增强与识别[J]. 光学学报, 2023, 43(6):226-238.
[
|
| [25] |
赵丹露, 张永安, 何光辉, 等. 透烟雾红外数字全息像的亮度增强算法[J]. 中国激光, 2023, 50(18):290-301.
[
|
| [26] |
|
| [27] |
|
| [28] |
王吉晖, 王亚伟, 许廷发, 等. 三维物体抗仿射变换特征匹配方法[J]. 北京理工大学学报, 2013, 33(11):1193-1197.
[
|
| [29] |
|
| [30] |
|
/
| 〈 |
|
〉 |