
YOLO11-DAE:高分遥感图像露天煤矿复杂场景目标识别方法
作者贡献:Author Contributions
刘英和范雅慧参与实验设计;刘英、范雅慧、岳辉参与论文的写作和修改。所有作者均阅读并同意最终稿件的提交。
The study was designed by LIU Ying and FAN Yahui. The manuscript was drafted and revised by LIU Ying, FAN Yahui and YUE Hui. All the authors have read the last version of the paper and consented for submission.
|
刘 英(1982— ),女,山东滨州人,博士,副教授,主要从事环境遥感研究。E-mail: liuying712100@163.com |
收稿日期: 2025-05-11
修回日期: 2025-07-11
网络出版日期: 2025-09-09
基金资助
陕西省自然科学基础研究计划项目(2023-JC-YB-266)
陕西省自然科学基础研究计划项目(2023-JC-YB-440)
YOLO11-DAE: A Target Recognition Method for Complex Scenes in Open-Pit Coal Mines Using High-Resolution Remote Sensing Images
Received date: 2025-05-11
Revised date: 2025-07-11
Online published: 2025-09-09
Supported by
Natural Science Basic Research Program of Shaanxi(2023-JC-YB-266)
Natural Science Basic Research Program of Shaanxi(2023-JC-YB-440)
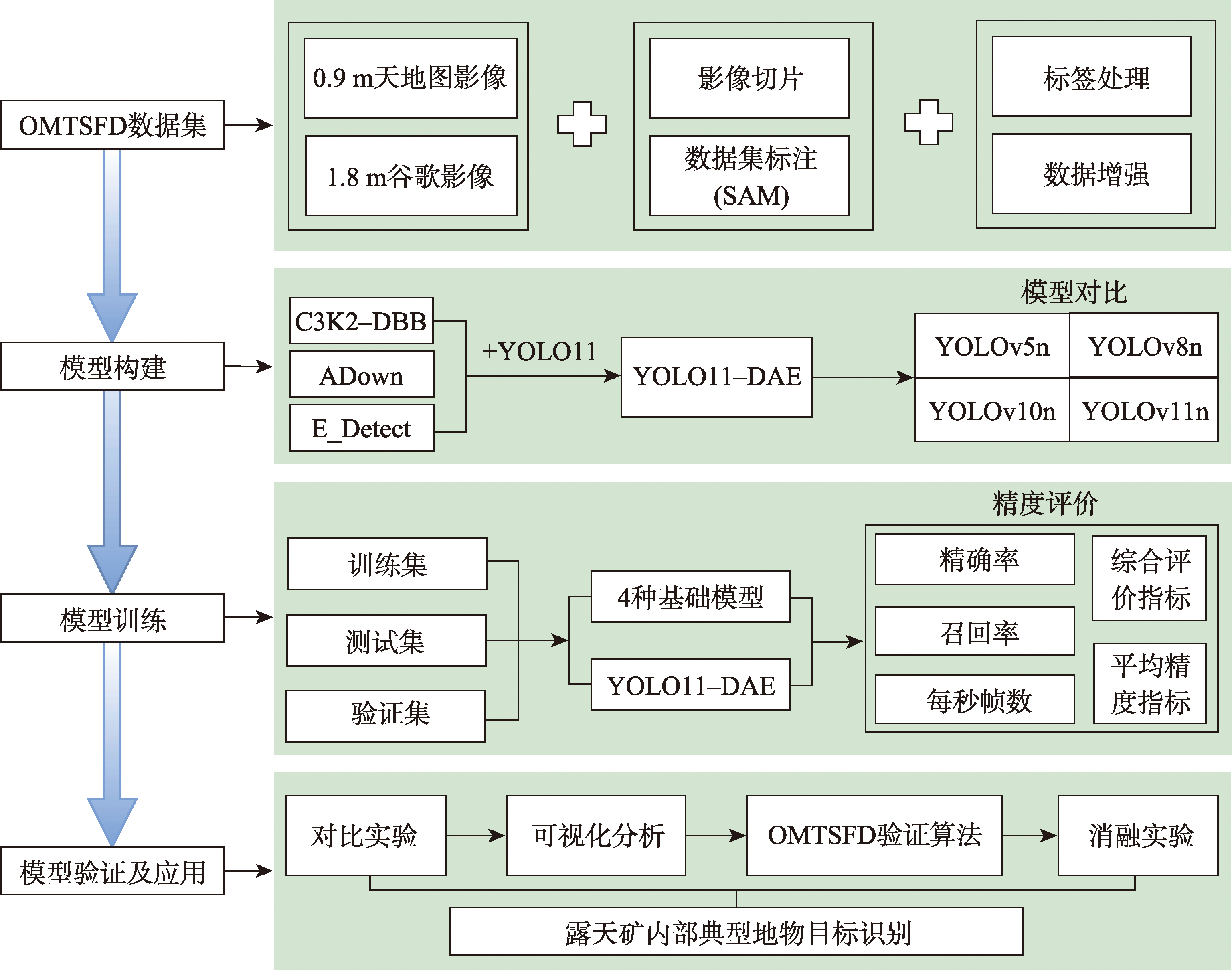
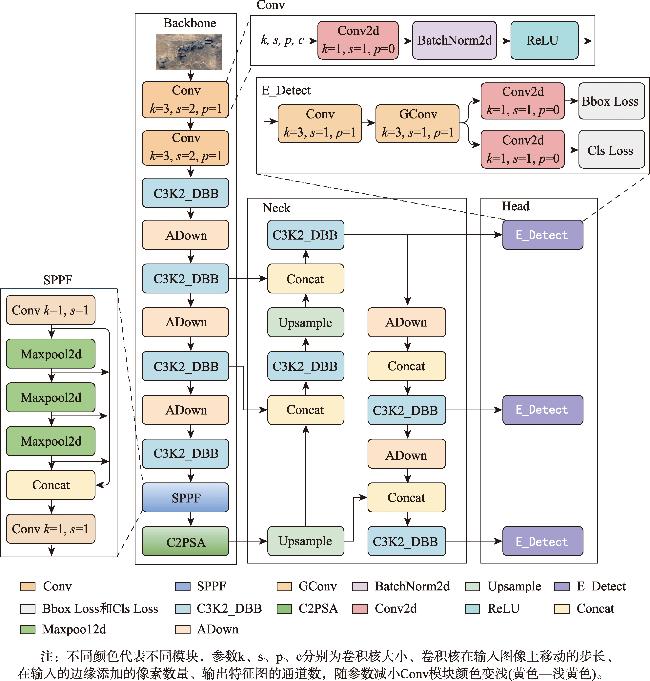
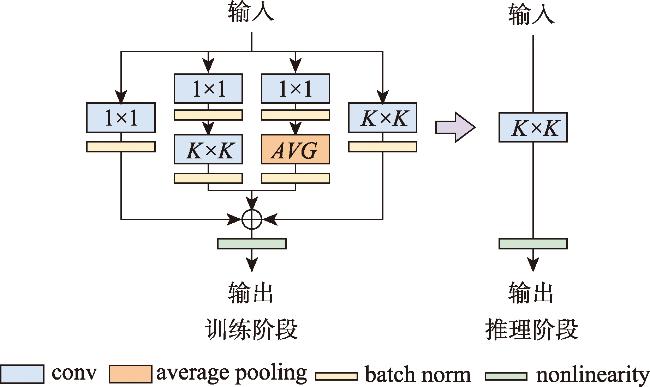
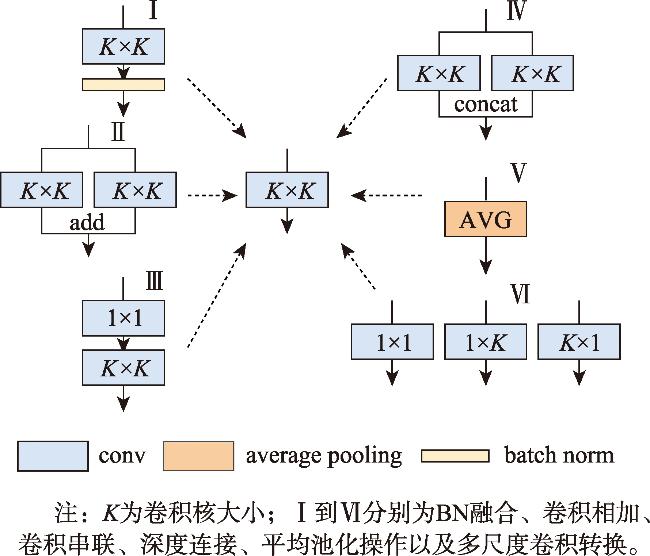
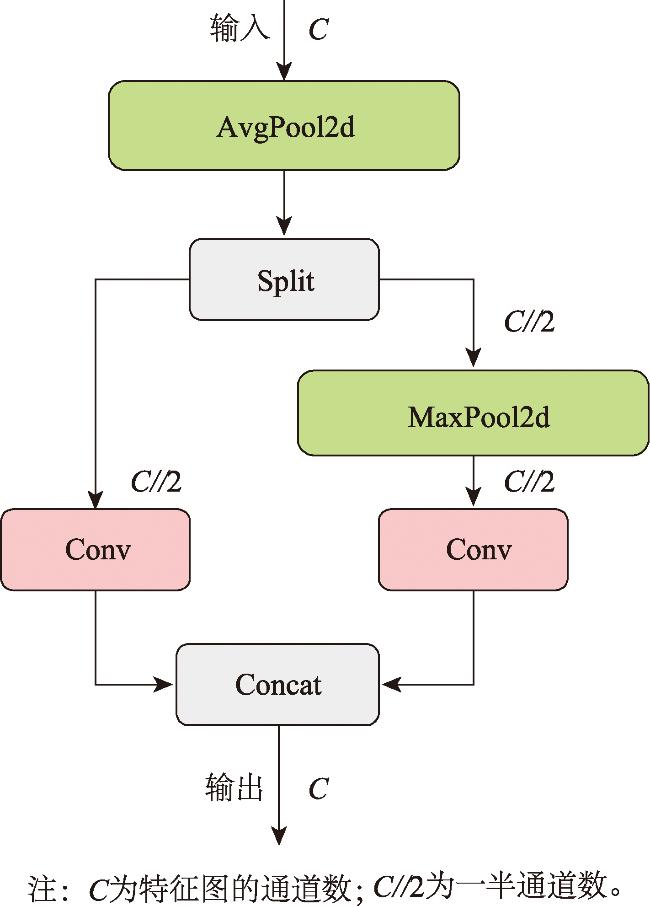
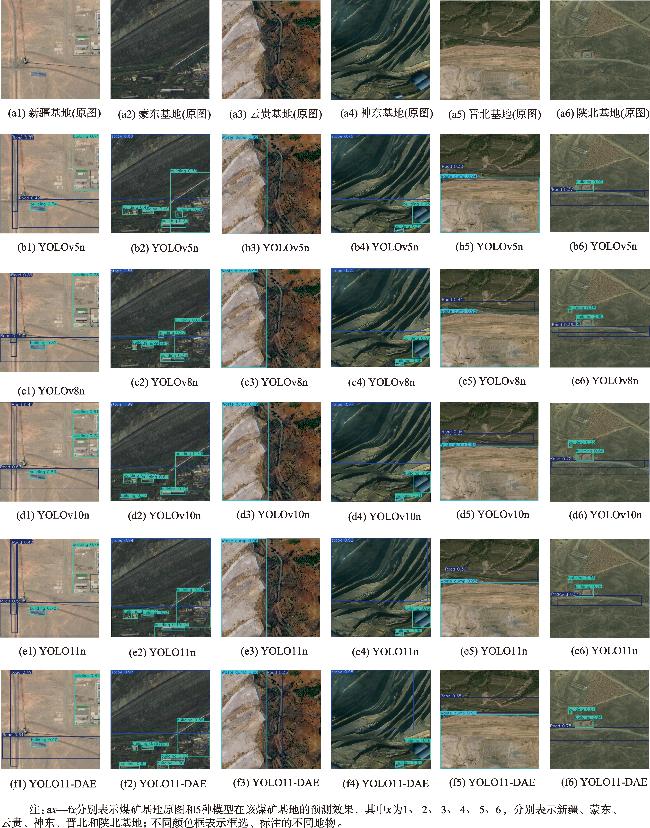
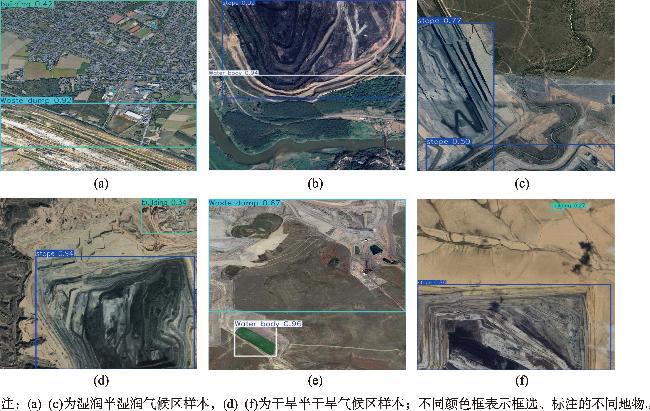
【目的】矿产资源是人类生存和经济发展的重要物质基础,开展矿山监测、建立矿山监测模型对矿产资源的高效开发和矿区环境保护具有重要意义。针对露天矿区背景复杂、目标尺度多样且小目标聚集的特点,本研究旨在构建兼顾监测精度与效率的轻量化模型,以提升矿区目标地物监测的准确性和效率。【方法】现有遥感数据集存在的样本单一、地域局限等问题,因此本文基于0.9 m天地图与1.8 m谷歌影像构建了不同气候背景、大范围和多种地物的六大露天煤矿基地OMTSFD(Open-pit Mine Typical Surface Features Dataset)数据集,提出改进的YOLO11-DAE算法进行模型训练与验证。首先,在骨干网络和特征金字塔中引入C3K2-DBB模块以增强多尺度特征捕获能力;其次,采用ADown模块替换网络下采样卷积,增强了模块对不同特征的表征能力,减少了低对比度场景的细节丢失;最后,采用E_Detect高效检测头降低模型复杂度和参数量,实现模型轻量化。【结果】实验表明,YOLO11-DAE的每秒帧数(Frames Per Second, FPS)为528.100,模型推理速度较快,精确率(Precision,P)、召回率(Recall,R)、综合评价指标(F1-Score, F1)、平均精度均值(Mean Average Precision, mAP)分别达到0.932、0.894、0.913和0.950,显著优于YOLOv5n、YOLOv8n和YOLOv10n算法,相较于YOLOv11n各项指标分别提高7.600%、10.000%、8.800%、8.000%。【结论】YOLO11-DAE算法能够满足矿区实时监测,并适用于多尺度、多背景等复杂场景的目标识别,实现了高精度、低漏检率的监测目标,达到了模型可应用性与实时性的平衡。
刘英 , 范雅慧 , 岳辉 . YOLO11-DAE:高分遥感图像露天煤矿复杂场景目标识别方法[J]. 地球信息科学学报, 2025 , 27(9) : 2230 -2249 . DOI: 10.12082/dqxxkx.2025.250213
[Objectives] Mineral resources are a vital material foundation for human survival and economic development. Conducting mine monitoring and establishing monitoring models are essential for the efficient utilization of mineral resources and environmental protection in mining areas. Given the complex backgrounds, diverse target scales, and dense distribution of small targets in open-pit mining areas, this study aims to develop a lightweight model that balances monitoring accuracy and efficiency, thereby improving the recognition of target objects in such environments. [Methods] Existing remote sensing datasets often suffer from limitations such as low sample diversity and regional constraints. To address this, we construct the OMTSFD (Open-pit Mine Typical Surface Features Dataset) based on 0.9 m TianDiTu and 1.8 m Google imagery. The dataset covers various climate backgrounds, large areas, and a wide range of surface features. For model training and validation, we propose an improved YOLO11-DAE algorithm. First, the C3K2-DBB module is integrated into both the backbone and feature pyramid networks to enhance multi-scale feature extraction. Second, the ADown module replaces traditional downsampling convolution layers, improving the representation of diverse features and reducing detail loss in low-contrast scenes. Finally, the E_Detect efficient detection head is introduced to reduce model complexity and the number of parameters, contributing to overall model lightweighting. [Results] Experimental results show that YOLO11-DAE achieves an FPS of 528.100, indicating high inference speed. The model achieves a precision (P) of 0.932, recall (R) of 0.894, F1-score of 0.913, and mean average precision (mAP) of 0.950, significantly outperforming YOLOv5n, YOLOv8n, and YOLOv10n algorithms. Compared to YOLOv11n, the proposed method improves performance by 7.600%, 10.000%, 8.800%, and 8.000% in the respective metrics. [Conclusions] The YOLO11-DAE algorithm meets real-time monitoring requirements in mining areas and is well-suited for complex scenarios involving multi-scale and multi-background targets. It achieves high-precision detection with a low miss rate and strikes an effective balance between model applicability and real-time performance.
表1 公开遥感数据集Tab. 1 Publicly available remote sensing datasets |
| 数据集名称 | 类别 | 存储格式 | 图像大小/像素×像素 | 图像数/万 | 标注框数/万 |
|---|---|---|---|---|---|
| ImageNet | 200 | .xml | 256×256 | 1400 | 534 |
| NWPU-RESISC45 | 45 | .xml | 256×256 | 3.15 | 3.15 |
| Objects365 | 365 | .xml | 512×683 | 638 | 10 101 |
| FAIR1M | 37 | .xml | 1 000×1 000~10 000×10 000 | 164 | 2 000 |
表2 训练参数Tab. 2 Training parameter |
| 参数 | 参数值 |
|---|---|
| 学习率 | 0.01 |
| 优化器 | SGD |
| 批量大小 | 16 |
| 图像大小/(像素×像素) | 512×512 |
| 动量 | 0.937 |
| 工作进程数 | 4 |
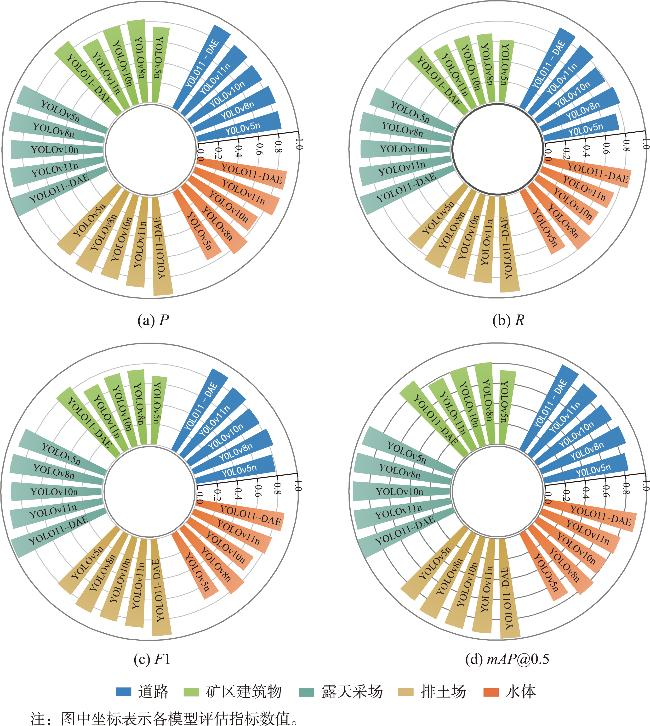
表3 不同检测算法比较Tab. 3 Comparison of different detection algorithms |
| 分类类型 | P | R | F1 | mAP@0.5 | FPS |
|---|---|---|---|---|---|
| YOLOv5n | 0.826 | 0.744 | 0.783 | 0.832 | 540.800 |
| YOLOv8n | 0.872 | 0.810 | 0.840 | 0.886 | 519.900 |
| YOLOv10n | 0.837 | 0.786 | 0.811 | 0.874 | 417.000 |
| YOLOv11n | 0.866 | 0.813 | 0.839 | 0.880 | 544.500 |
| YOLO11-DAE | 0.932 | 0.894 | 0.913 | 0.950 | 528.100 |
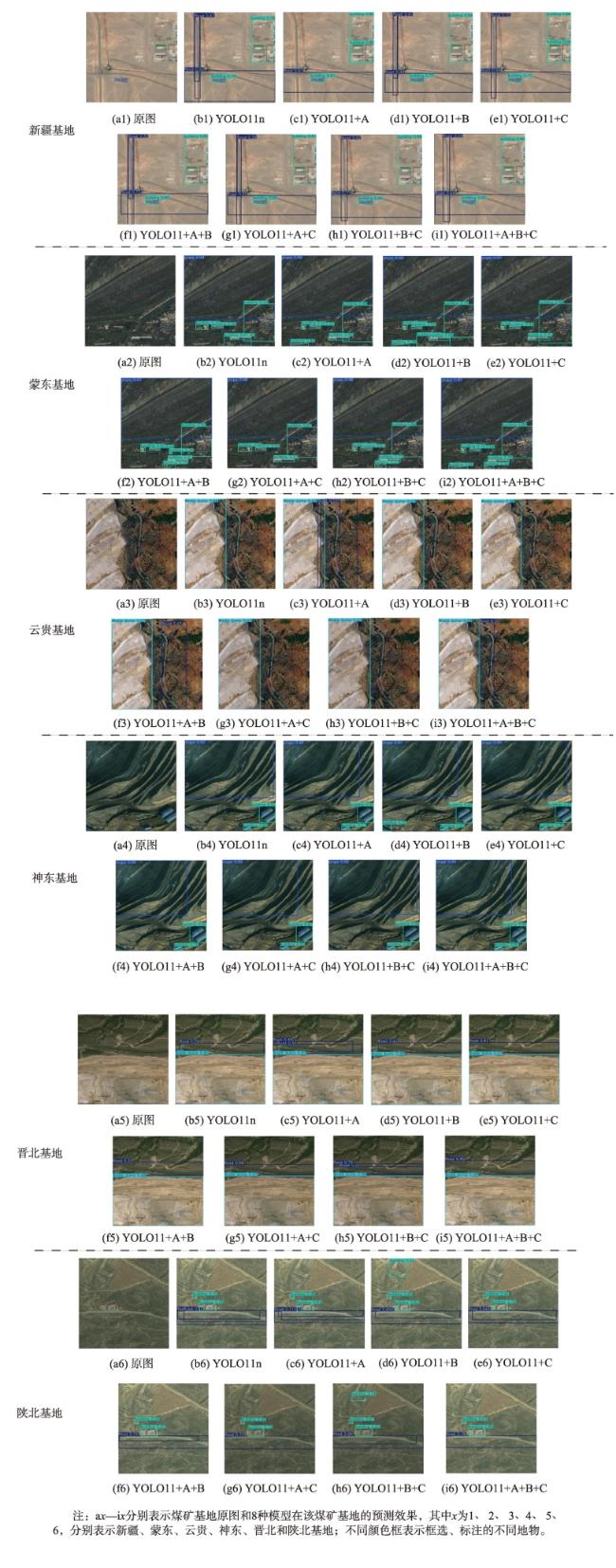
表4 YOLO11-DAE监测精度差异分析Tab. 4 Precision difference analysis of YOLO11-DAE monitoring |
| 不同试验区 | P | R | F1 | mAP@0.5 | 精度差异分析 |
|---|---|---|---|---|---|
| 神东基地 | 0.929 | 0.976 | 0.952 | 0.990 | 综合检测性能最优,与该区域的数据质量高和目标特征明显相关 |
| 新疆基地 | 0.943 | 0.905 | 0.924 | 0.959 | 该区域模型精确率较高(误检少),但召回率略低(存在漏检),可能是由于目标分布稀疏或背景复杂导致部分目标未被检出 |
| 蒙东基地 | 0.938 | 0.885 | 0.911 | 0.949 | 召回率相对较低,可能是目标遮挡或光照条件影响了检测性能 |
| 晋北基地 | 0.939 | 0.862 | 0.899 | 0.936 | 召回率较低,表明漏检较多,与目标尺寸较小或背景干扰较大相关 |
| 陕北基地 | 0.976 | 0.900 | 0.936 | 0.971 | 精确率最高,但召回率略低于神东基地,与目标特征明显但分布稀疏相关 |
| 云贵基地 | 0.919 | 0.927 | 0.923 | 0.956 | 各项指标较为均衡,与环境多样性或数据标注差异相关 |
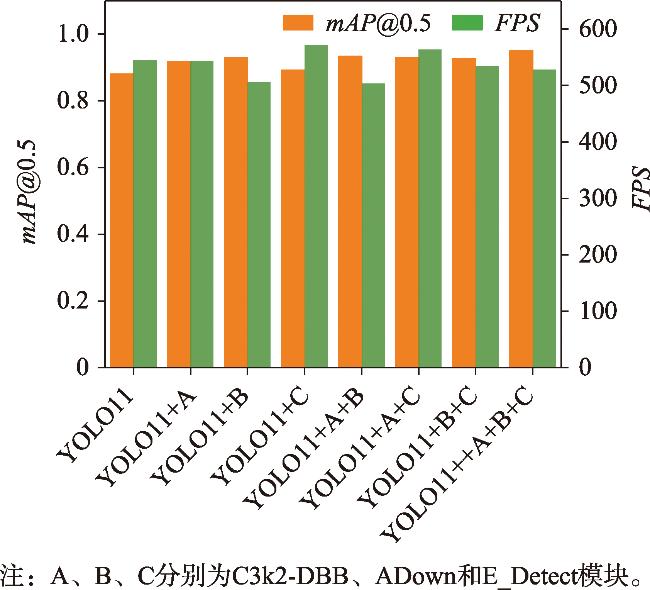
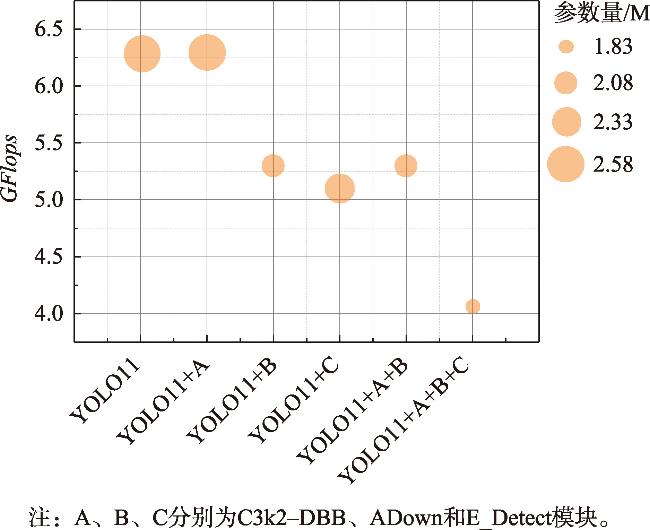
表5 消融实验结果Tab. 5 Ablation experiment results |
| Base-line | C3k2-DBB | ADown | E_Detect | P | R | F1 |
|---|---|---|---|---|---|---|
| √ | 0.866 | 0.813 | 0.839 | |||
| √ | √ | 0.896 | 0.843 | 0.869 | ||
| √ | √ | 0.916 | 0.860 | 0.887 | ||
| √ | √ | 0.873 | 0.822 | 0.847 | ||
| √ | √ | √ | 0.905 | 0.881 | 0.893 | |
| √ | √ | √ | 0.924 | 0.865 | 0.894 | |
| √ | √ | √ | 0.888 | 0.876 | 0.882 | |
| √ | √ | √ | √ | 0.932 | 0.894 | 0.913 |
表6 YOLOv8n和YOLOv11n模型对比结果Tab. 6 Comparison results of YOLOv8n and YOLOv11n models |
| Base-line | C3k2-DBB | ADown | E_Detect | P | R | F1 | mAP@0.5 | FPS |
|---|---|---|---|---|---|---|---|---|
| YOLOv8n | 0.872 | 0.810 | 0.840 | 0.886 | 519.900 | |||
| √ | 0.902 | 0.849 | 0.875 | 0.912 | 530.200 | |||
| √ | 0.875 | 0.854 | 0.864 | 0.915 | 502.900 | |||
| √ | 0.877 | 0.793 | 0.833 | 0.886 | 552.800 | |||
| √ | √ | 0.929 | 0.887 | 0.908 | 0.944 | 506.200 | ||
| √ | √ | √ | 0.899 | 0.836 | 0.866 | 0.909 | 525.900 | |
| YOLOv11n | 0.866 | 0.813 | 0.839 | 0.880 | 544.500 | |||
| √ | 0.896 | 0.843 | 0.869 | 0.917 | 543.100 | |||
| √ | 0.916 | 0.860 | 0.887 | 0.929 | 505.200 | |||
| √ | 0.873 | 0.822 | 0.847 | 0.892 | 571.800 | |||
| √ | √ | 0.905 | 0.881 | 0.893 | 0.934 | 503.400 | ||
| √ | √ | √ | 0.932 | 0.894 | 0.913 | 0.950 | 528.100 |
表7 3种算法分类结果精度Tab. 7 Accuracy of classification results by three algorithms |
| 类别 | 方法 | P | R | F1 | mAP@0.5 |
|---|---|---|---|---|---|
| 矿区建筑物 | Faster-RCNN | 0.434 | 0.717 | 0.541 | 0.690 |
| SSD | 0.830 | 0.398 | 0.540 | 0.456 | |
| YOLO11-DAE | 0.880 | 0.795 | 0.835 | 0.904 | |
| 露天采场 | Faster-RCNN | 0.820 | 0.967 | 0.887 | 0.980 |
| SSD | 0.901 | 0.535 | 0.670 | 0.565 | |
| YOLO11-DAE | 0.991 | 0.975 | 0.983 | 0.993 | |
| 排土场 | Faster-RCNN | 0.793 | 0.974 | 0.874 | 0.960 |
| SSD | 0.908 | 0.527 | 0.670 | 0.567 | |
| YOLO11-DAE | 0.978 | 0.949 | 0.963 | 0.987 | |
| 道路 | Faster-RCNN | 0.623 | 0.922 | 0.744 | 0.900 |
| SSD | 0.864 | 0.395 | 0.540 | 0.465 | |
| YOLO11-DAE | 0.916 | 0.879 | 0.897 | 0.939 | |
| 水体 | Faster-RCNN | 0.649 | 0.934 | 0.766 | 0.910 |
| SSD | 0.893 | 0.543 | 0.670 | 0.557 | |
| YOLO11-DAE | 0.897 | 0.871 | 0.884 | 0.926 |
表8 不同方法目标检测性能对比Tab. 8 Performance comparison of different methods for object detection |
| 方法 | mAP@0.5 | FPS | 参数量/M | 模型大小/MB |
|---|---|---|---|---|
| NanoDet | 0.421 | 540.600 | 0.940 | 3.800 |
| RT-DETR | 0.830 | 107.900 | 19.870 | 77.000 |
| YOLO11-DAE | 0.950 | 528.100 | 1.830 | 5.500 |
利益冲突:Conflicts of Interest 所有作者声明不存在利益冲突。
All authors disclose no relevant conflicts of interest.
| [1] |
|
| [2] |
|
| [3] |
国务院关于印发2030年前碳达峰行动方案的通知[C]// 中国企业改革发展2021蓝皮书.国务院, 2021:473-483.
[ Notification of the state council on issuing the action plan for carbon peaking before 2030[C]// 2021 Blue Book on the Reform and Development of Chinese Enterprises.State Council, 2021:473-483 ] DOI:10.26914/c.cnkihy.2021.070332
|
| [4] |
朱冬雨, 陈涛, 牛瑞卿, 等. 利用移动窗口遥感生态指数分析矿区生态环境[J]. 武汉大学学报(信息科学版), 2021, 46(3):341-347.
[
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
黄登冕, 张聪, 姚晓军, 等. 矿山环境遥感监测研究进展[J]. 遥感技术与应用, 2022, 37(5):1043-1055.
[
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
胡乃勋, 陈涛, 甄娜, 等. 基于卷积神经网络的面向对象露天采场提取[J]. 遥感技术与应用, 2021, 36(2):265-274.
[
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
黄登冕. 基于深度学习的典型矿山地物智能识别方法研究——以祁连山为例[D]. 兰州: 西北师范大学, 2022.
[
|
| [21] |
张成业, 李飞跃, 李军, 等. 基于DeepLabv3+与GF-2高分辨率影像的露天煤矿区土地利用分类[J]. 煤田地质与勘探, 2022, 50(6):94-103.
[
|
| [22] |
|
| [23] |
王永生, 姬嗣愚. 基于深度学习的目标检测算法综述[J]. 计算机与数字工程, 2023, 51(6):1231-1237.
[
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
|
| [29] |
|
| [30] |
|
| [31] |
|
| [32] |
|
| [33] |
|
| [34] |
王立兵, 任予鑫, 马昆, 等. 多源数据融合智能识别煤矿山场景特征AI模型[J]. 煤炭学报, 2023, 48(12):4617-4631.
[
|
| [35] |
赵银娣, 卫虹宇, 董霁红, 等. 基于子区域多标签学习的露天煤矿区场景识别[J]. 遥感学报, 2022, 26(9):1849-1858.
[
|
| [36] |
张峰极, 吴艳兰, 姚雪东, 等. 基于改进DenseNet网络的多源遥感影像露天开采区智能提取方法[J]. 遥感技术与应用, 2020, 35(3):673-684.
[
|
| [37] |
|
| [38] |
|
| [39] |
|
| [40] |
|
| [41] |
|
| [42] |
|
| [43] |
|
| [44] |
龚健雅, 许越, 胡翔云, 等. 遥感影像智能解译样本库现状与研究[J]. 测绘学报, 2021, 50(8):1013-1022.
[
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}