
Journal of Geo-information Science >
Assessing the Accuracy of Spatial and Temporal Image Fusion Model of Complex area in South China
Received date: 2013-11-15
Request revised date: 2013-12-26
Online published: 2014-09-04
Copyright
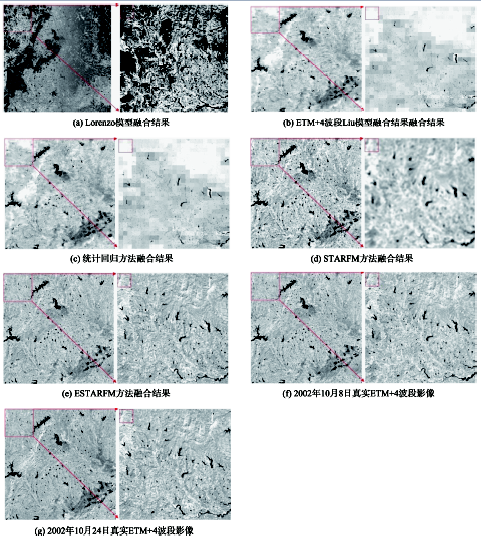
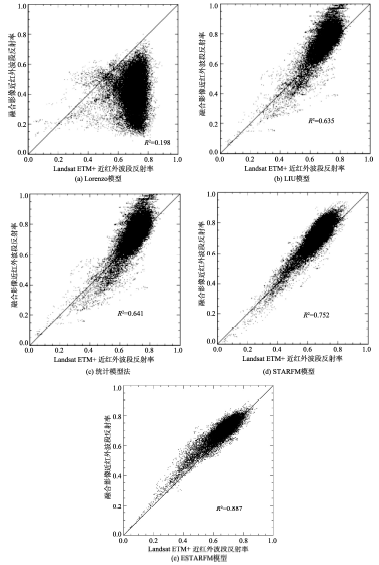
Due to cloud coverage and obstruction, it is difficult to obtain useful images during the critical periods of monitoring vegetation using medium resolution spatial satellites such as Landsat and Satellite Pour l'Observation de la Terre (SPOT), especially in pluvial regions. A solution for fine-scale vegetation research is to blend the data from both high temporal resolution sensors (e.g., MODIS) and moderate ground resolution satellites (e.g., Landsat) to generate synthetic observations with characteristics of both. In recent decades, several approaches have been proposed to enhance the temporal frequency of high-resolution spatial satellite observations. However, there is a lack of application research of those methods, especially in South China where the climate is complex and the region is scattered with broken terrain. In order to evaluate the application ability of spatial and temporal image fusion models in South China, five spatial and temporal image fusion models were assessed in this paper. The five models are LORENZO model, LIU model, statistical model, STARFM and ESTARFM. Using the Landsat-ETM+ and MODIS data, the five methods were tested in an area near the Nanjing city of Jiangsu Province. QualitativeE:\app:ds:qualitativeevaluationE:\app:ds:evaluation and quantitativeE:\app:ds:quantitativeevaluationE:\app:ds:evaluation methods were used to evaluate the similarity between the simulated images and the real Landsat ETM+ images. Results showed that except Lorenzo model, the other models were able to produce synthetic images very similar to the actual observed images with a correlation coefficients r of higher than 0.6. The more information, such as distance, temporal and spectral information, isused in the image fusion, the synthetic fusion image could better reflect the detailed features of land surface.
WU Mingquan , NIU Zheng , WANG Changyao . Assessing the Accuracy of Spatial and Temporal Image Fusion Model of Complex area in South China[J]. Journal of Geo-information Science, 2014 , 16(5) : 776 -783 . DOI: 10.3724/SP.J.1047.2014.00776
Tab.1 Input parameters of models表1 各模型输入参数 |
| 模型 | 输入数据 | 验证数据 | |||||
|---|---|---|---|---|---|---|---|
| MODIS数据 | Landsat数据 | 分类影像 | Landsat数据 | ||||
| 波段 | 数据日期 | 波段 | 数据日期 | 波段 | 数据日期 | ||
| LORENZO模型 | MOD02 | 2002-10-08 2002-10-24 | ETM+4 | 2002-10-08 | 30 m分类图 | ETM+4 | 2002-10-24 |
| LIU模型 | MOD02 | 2002-10-08 | 15 m分类图 | ETM+4 | 2002-10-08 | ||
| 统计模型法 | MOD02 | 2002-10-08 | 15 m分类图 | ETM+4 | 2002-10-08 | ||
| STARFM | MOD02 | 2002-10-08 2002-10-24 | ETM+4 | 2002-10-08 | ETM+4 | 2002-10-24 | |
| ESTARFM | MOD02 | 2002-10-08 2002-10-24 | ETM+4 | 2002-10-08 2002-11-09 | ETM+4 | 2002-10-24 | |
Fig.1 outputs of different models and real images图1 各方法融合结果与真实影像 |
Tab.2 Comparison of different model results表2 各模型融合效果比较 |
| 模型 | R2 | var(a) | MAD | bias | RMSE |
|---|---|---|---|---|---|
| LORENZO模型 | 0.198 | 0.081 | 0.236 | 0.273 | 0.395 |
| LIU模型 | 0.635 | 0.026 | 0.119 | 0.169 | -0.049 |
| 统计模型法 | 0.641 | 0.026 | 0.121 | 0.165 | -0.034 |
| STARFM | 0.752 | 0.019 | 0.105 | -0.050 | 0.146 |
| ESTARFM | 0.887 | 0.009 | 0.069 | -0.034 | 0.095 |
Fig.2 Scatter diagram between the fusion image and the real image图2 融合影像与真实影像间的散点图 |
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}