
Journal of Geo-information Science >
An Integrated Representation Model for Direction Relationships and Metric Relationships
*The author: SHEN Jingwei, E-mail:jingweigis@163.com
Received date: 2014-04-04
Request revised date: 2014-05-20
Online published: 2015-02-10
Copyright
Both direction relationships and metric relationships are important spatial relationships. Independent representation model for direction relationships and metric relationships have appeared in large numbers. However, direction relationships and metric relationships have not been overall considered and the existing composition models have many drawbacks. Therefore, based on improvement of cone shaped direction relationships model and qualitative metric relationships model, an integrated representation model is proposed and the two spatial relationships are studied in a unified framework. To begin with, the direction relationships are classified into eight types by the improvement of cone shaped direction relationships model and the metric relationships are divided into three categories. Eight direction relationships include east, north, west, south, northeast, northwest, southwest and southeast relationships. And three matric relationships, which include near, middle and far matric relationships, are set forth. Then, a 7×7 matrix is used to depict direction relationships and metric relationships in a unified framework, and it is detailed but relatively complex. Moreover, a 3×3 matrix, which replaces the above mentioned 7×7 matrix, is introduced to represent the direction and metric relationships. The range of the element in the matrix is descripted. The number of the matrix is set forth. Because not all the integrated relationships for direction and metric relationships are valid, five rules about the integrated representation model for direction and metric relationships are defined to exclude the invalid matrix. To verify the effectiveness of the integrated model, an example is given to testify the resultant relationships by applying the integrated model. Results show that this integrated representation model can improve the representation effect of the spatial relationships.
SHEN Jingwei . An Integrated Representation Model for Direction Relationships and Metric Relationships[J]. Journal of Geo-information Science, 2015 , 17(2) : 147 -152 . DOI: 10.3724/SP.J.1047.2015.00147
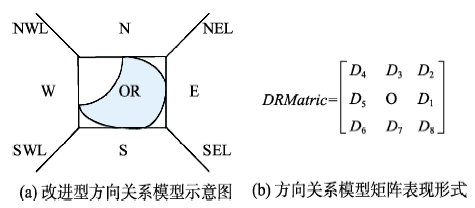
Fig. 1 The improvement of cone shaped direction relationships model图1 改进型方向关系模型 |
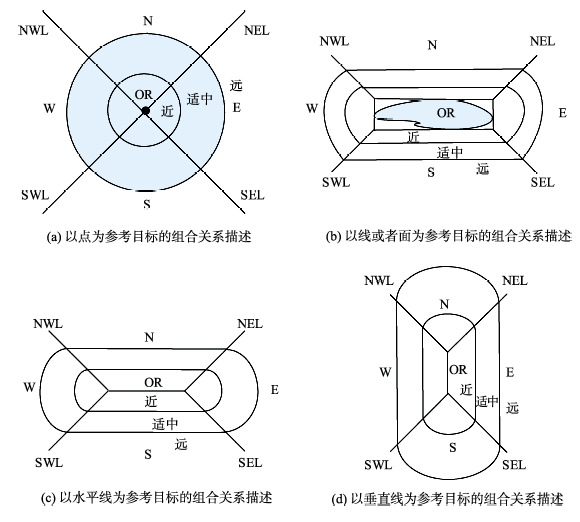
Fig. 2 The integrated representation of direction and metric relationships图2 方向和度量关系组合描述 |
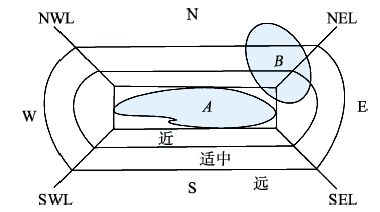
Fig. 3 The example of the integrated model for direction and matric relationships between spatial object A and B图3 空间目标A和B之间方向和度量组合关系示例 |
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}