
Journal of Geo-information Science >
Research on Spatial Sensitivity Analysis Using Parallel Algorithm Based on MapReduce
Received date: 2013-12-28
Request revised date: 2014-02-24
Online published: 2014-11-01
Copyright
In recent years, with the rapid development of remote sensing technology, the spatial data represented by remote sensing images is widely used in ecosystem modeling, which promoted the development of ecological remote sensing parametric model in the regional scale. Sensitivity analysis is a key step for ecosystem model uncertainty quantification. It can identify the dominant parameters, reduce the model calibration uncertainty, and enhance the model optimization efficiency. Due to the intensive computation of spatial data during the sensitivity analysis, the traditional stand-alone environment cannot meet the requirements of rapid analysis for the regional scale remote sensing parametric model. This study designed and realized a parallel algorithm of Sobol′ spatial sensitivity analysis utilizing Hadoop, which is an open source cloud computing platform, based on VPM (Vegetation Photosynthesis Model). In order to verify the efficiency of the algorithm, we designed a comparison experiment to compare the efficiency differences of the traditional serial algorithm and the parallel algorithm. The parallel programming technology we used in this research was MapReduce, which divided the processes of map sampling and the iterative calculation during the spatial sensitivity analysis into subtasks, and assigned them to multiple computing nodes for parallel computing. The numerical experiment showed that the parallel strategy proposed in this study effectively shortened the time of model iterative calculations and significantly improved the efficiency of spatial sensitivity analysis for ecological remote sensing parametric model. Compared with the serial algorithm, the computing efficiency of the parallel algorithm was enhanced by 14 times.
LI Fan , HE Honglin , REN Xiaoli , ZHANG Li , LU Qianqian , YU Guirui . Research on Spatial Sensitivity Analysis Using Parallel Algorithm Based on MapReduce[J]. Journal of Geo-information Science, 2014 , 16(6) : 874 -881 . DOI: 10.3724/SP.J.1047.2014.00874
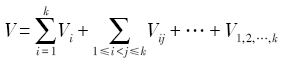
Fig. 1 Flow chart of serial spatial sensitivity analysis algorithm based on Sobol′图1 基于Sobol′的空间敏感性分析串行算法流程 |
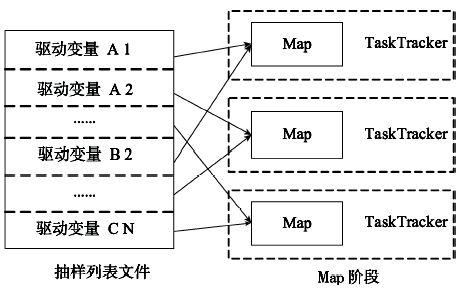
Fig. 2 Schematic diagram of map sampling parallelization for driving variables图2 驱动变量地图抽样任务并行示意图 |
Tab. 1 The input and output data of Map phase表1 Map阶段输入输出数据项 |
| 数据项 | 键(key) | 值(value) |
|---|---|---|
| 输入 | 驱动变量名 | 抽样结果编号 |
| 输出 | 空值(NullValue) | 二进制抽样结果文件 |
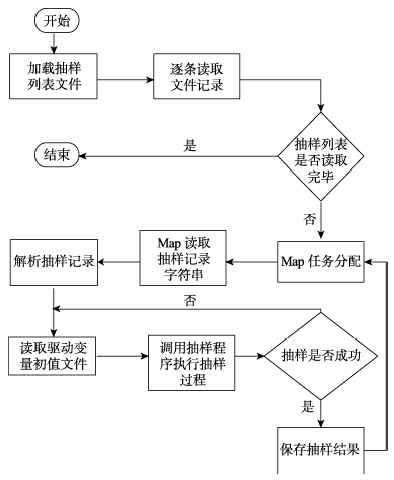
Fig. 3 Flow chart of map sampling parallel algorithm for driving variables图3 驱动变量地图抽样并行算法流程图 |
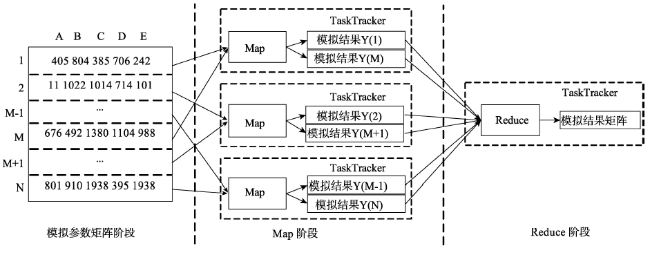
Fig. 4 Schematic diagram of the parallel algorithm of model iterative simulation图4 模型并行迭代计算示意图 |
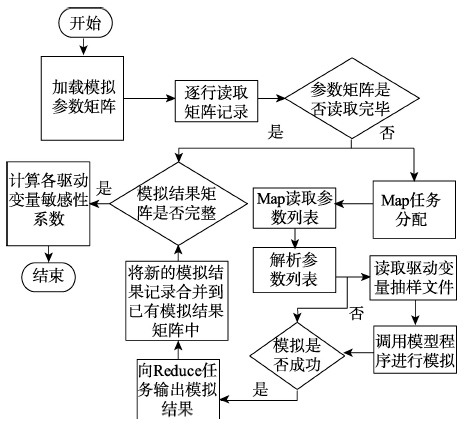
Fig. 5 Flow chart of parallel algorithm of model iterative simulation图5 模型迭代计算并行算法流程图 |
Tab. 2 The input and output data of Map and Reduce phases表2 Map和Reduce阶段输入输出数据项 |
| 数据项 | 键(Key) | 值(Value) |
|---|---|---|
| Map输入 | 矩阵行索引 | 各驱动变量抽样编号列表 |
| Map输出 | 矩阵行索引 | 模拟结果Y |
| Reduce输入 | 矩阵行索引 | 模拟结果Y |
| Reduce输出 | 空值(NullValue) | 模拟结果矩阵 |
Tab. 3 First order sensitivity indices and total order sensitivity indices of VPM model inputs表3 VPM模型参数的一阶敏感度系数和总敏感度系数 |
| 输入变量 | 一阶敏感度系数(Si) | 总敏感度系数(STi) |
|---|---|---|
| ε0 | 0.92270 | 1.00414 |
| T | 0.00508 | 0.04957 |
| PAR | 0.00042 | 0.00563 |
| EVI | 0.00184 | 0.02241 |
| LSWI | 0.00005 | 0.00070 |
| 总和 | 0.93009 | 1.08245 |
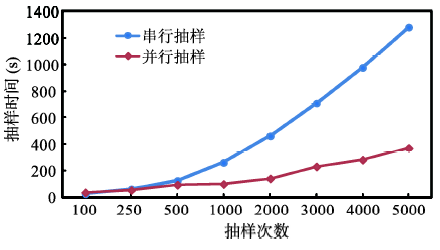
Fig. 6 Efficiency comparison between serial and parallel sampling algorithm图6 单机和并行抽样算法的运行效率对比图 |
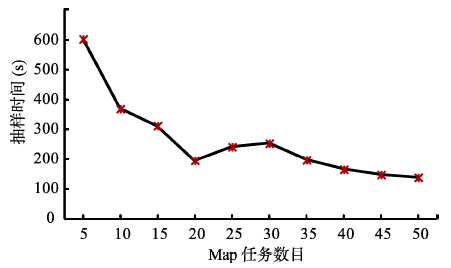
Fig. 7 Sampling efficiency comparison chart of 5000 samples using different amounts of Maps图7 抽样次数为5000时不同Map任务数目抽样效率对比图 |
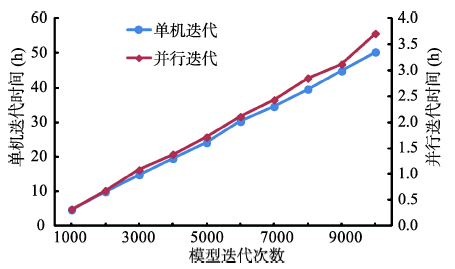
Fig. 8 Efficiency comparison chart of serial and parallel algorithms for model iterative simulation图8 单机和并行模型迭代算法的运行效率对比图 |
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
Apache Hadoop. Hadoop[EB/OL].
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
|
| [29] |
|
| [30] |
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}