
Journal of Geo-information Science >
A Quadratic Programming Model for Variable-Scale Representation of Graded Road Network Considering Spatial Conflict
Received date: 2014-11-12
Request revised date: 2014-12-02
Online published: 2015-02-10
Copyright
Variable-scale visualization technique has been widely applied in the representation of road network data. The main focus of this technology is to highlight the dense central area in a limited map layout with large-scale display method. On the other hand, the marginal and assistant map contents, which are relatively unimportant, will be displayed in small-scale. However, in previous studies, methods using coordinate transformation formula may cause excessive map deformation and spatial conflict among road elements. To solve these problems, a quadratic programming model is proposed to improve the visual effect of variable-scale transformation. In this paper, a line distortion rule based on road grade is constructed. In addition, a spatial conflict constraint rule based on support vector machine is applied to eliminate topological errors of road network. Finally, the road network data in Zengcheng District of Guangzhou city are used to testify the purposed model and the method in this paper. The result shows that this model can dynamically improve the visual effect of variable-scale. Conclusively, this paper provides a new idea to deformation controlling and spatial conflict elimination in the field of variable-scale visualization research.
HUANG Jianfeng , ZHANG Xinchang , GUO Taisheng . A Quadratic Programming Model for Variable-Scale Representation of Graded Road Network Considering Spatial Conflict[J]. Journal of Geo-information Science, 2015 , 17(2) : 178 -184 . DOI: 10.3724/SP.J.1047.2015.00178
Fig. 1 Representation of road network nodes and lines图1 道路网结点及线段的表示方法 |
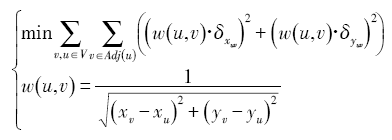
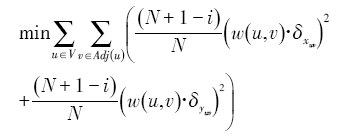
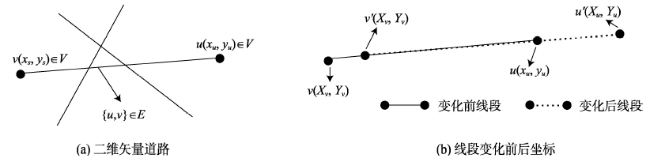
Fig. 2 Intersected lines during the process of variable-scale transformation图2 变比例尺过程中产生线相交问题 |
Fig. 3 Construction of dividing line C with support vector machine图3 利用支持向量机方法构建“分割线”C |
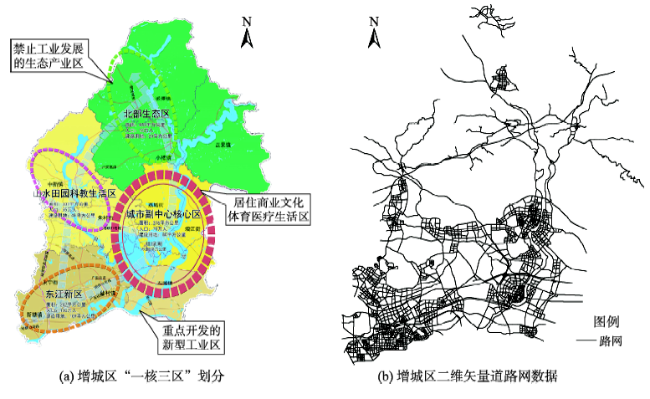
Fig. 4 Experimental data and the selection of focus region图4 试验数据与Focus区域选取 |
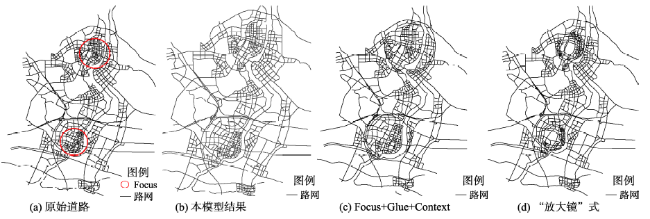
Fig. 5 Results of the first experiment图5 实验1结果 |
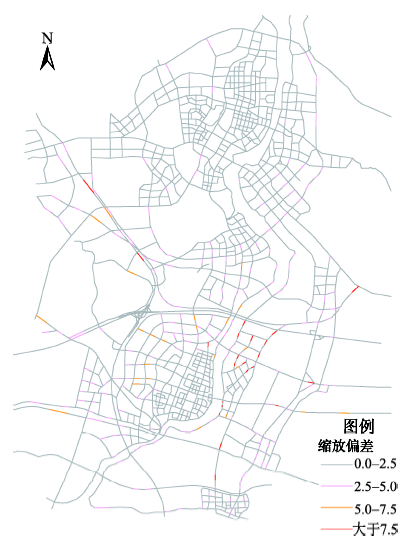
Fig. 6 Distribution of scaling deviations regarding to the result of the first experiment图6 实验1对应的缩放偏差分布图 |
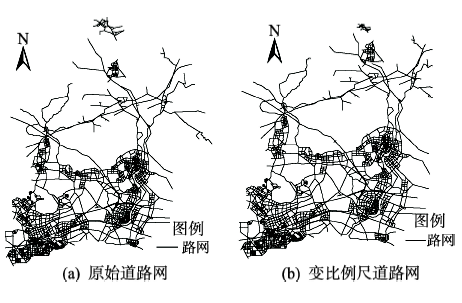
Fig. 7 Results of the second experiment图7 实验2结果 |
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
/
| 〈 |
|
〉 |

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}