
Journal of Geo-information Science >
A Novel Approach on Mixed Noise Removal Based on Low-rank Matrix Reconstruction
Received date: 2014-05-26
Request revised date: 2014-08-23
Online published: 2015-03-10
Copyright
This paper studies the problem of the restoration of images corrupted by mixed Gaussian-impulse noise. In recent years, low-rank matrix reconstruction has become a research hotspot in many scientific and engineering domains such as machine learning, image processing, computer vision and bioinformatics, which mainly involves the problems of matrix completion and robust principal component analysis. The two problems namely focus on recovering a low-rank matrix from an incomplete but accurate sampling subset of its entries, or from an observed data matrix with an unknown fraction of its entries being arbitrarily corrupted, respectively. Inspired by these ideas, the problem of recovering a low-rank matrix from an incomplete sampling subset of its entries with an unknown fraction of the samplings contaminated by arbitrary errors was considered, which was defined as a problem of matrix completion from corrupted samplings and modeled as a convex optimization problem that minimizes a combination of the nuclear norm and the l1-norm in this paper. Meanwhile, a novel and effective algorithm called augmented subsection Lagrange multipliers was put forward to exactly solve the problem. For the mixed Gaussian-impulse noise removal, we regard it as the problem of matrix completion from corrupted samplings, and restore the noisy images following by an impulse-detecting procedure. Compared with some existing methods for mixed noise removal, the recovery quality of our method is dominant when the images possess low-rank features such as geometrically regular textures and similar structural contents. Especially when the density of impulse noise is relatively high and the variance of Gaussian noise is small, our method can outperform the traditional methods significantly not only in the simultaneous removal of Gaussian noise and impulse noise, and in the restoration of low-rank image matrix, but also in the preservation of textures and details of the image.
MENG Fan , YANG Xiaomei , ZHOU Chenghu . A Novel Approach on Mixed Noise Removal Based on Low-rank Matrix Reconstruction[J]. Journal of Geo-information Science, 2015 , 17(3) : 344 -352 . DOI: 10.3724/SP.J.1047.2015.00344

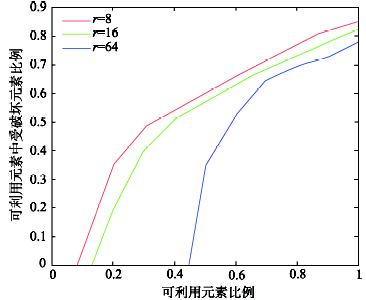
Fig. 1 Phase transition curve of the ASLM algorithm for the MCCS problem图1 关于MCCS问题的ASLM算法的相变曲线 |
Tab. 1 Comparisons of statistical indices under different on Barbara image with the removal of mixed noise表1 混合噪声去除统计指标-Barbara |
| (p,σ) | 统计指标 | 含噪影像 | TVL1法去噪 | Xiong and Yin法去噪 | 三边滤波法去噪 | MCCS-ASLM法 |
|---|---|---|---|---|---|---|
| PSNR(dB) | 15.132 | 20.077 | 26.472 | 21.528 | 27.163 | |
| SSIM | 0.956 | 0.940 | 0.984 | 0.962 | 0.986 | |
| PSNR(dB) | 12.184 | 19.702 | 25.713 | 19.712 | 26.386 | |
| SSIM | 0.913 | 0.934 | 0.981 | 0.949 | 0.982 | |
| PSNR(dB) | 10.407 | 18.214 | 24.688 | 17.652 | 25.287 | |
| SSIM | 0.870 | 0.915 | 0.976 | 0.933 | 0.977 | |
| PSNR(dB) | 14.910 | 20.070 | 25.892 | 20.726 | 25.385 | |
| SSIM | 0.938 | 0.941 | 0.978 | 0.954 | 0.975 | |
| PSNR(dB) | 12.044 | 19.603 | 25.280 | 19.432 | 25.067 | |
| SSIM | 0.896 | 0.934 | 0.976 | 0.945 | 0.973 | |
| PSNR(dB) | 10.349 | 18.722 | 24.256 | 16.838 | 24.182 | |
| SSIM | 0.855 | 0.923 | 0.971 | 0.928 | 0.970 |
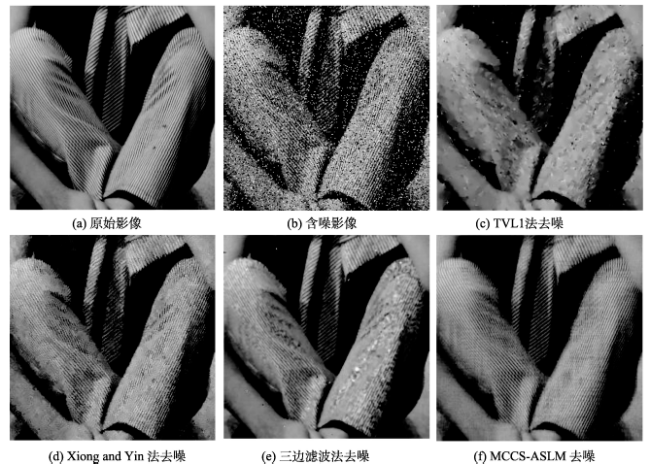
Fig. 2 Comparison of visual effects of noise removal on Barbara image with mixed Gaussian-impulse noise when p =0.1,σ =5/255图2 椒盐与高斯混合噪声去除的视觉效果对比-Barbara (0.1,5/255) |
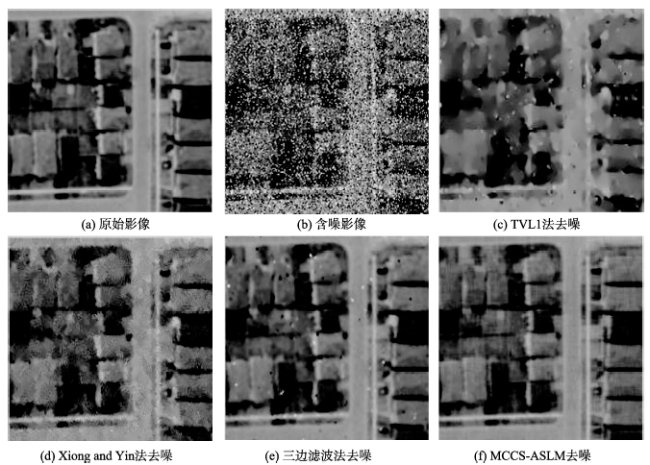
Fig. 3 Comparison of visual effects of noise removal on RS image with mixed Gaussian-impulse noise when p=0.2,σ=5/255图3 椒盐与高斯混合噪声去除的视觉效果对比-RS image(0.2,5/255) |
Tab. 2 Comparisons of statistical indices under different on RS image with the removal of mixed noise表2 混合噪声去除统计指标-RS image |
| (p,σ) | 统计指标 | 含噪影像 | TVL1法去噪 | Xiong and Yin法去噪 | 三边滤波法去噪 | MCCS-ASLM法 |
|---|---|---|---|---|---|---|
| PSNR(dB) | 15.620 | 26.444 | 36.079 | 33.976 | 36.246 | |
| SSIM | 0.954 | 0.972 | 0.996 | 0.994 | 0.996 | |
| PSNR(dB) | 12.509 | 24.635 | 34.918 | 30.145 | 35.170 | |
| SSIM | 0.910 | 0.957 | 0.995 | 0.989 | 0.995 | |
| PSNR(dB) | 10.691 | 23.340 | 33.037 | 27.797 | 33.691 | |
| SSIM | 0.861 | 0.945 | 0.992 | 0.983 | 0.993 | |
| PSNR(dB) | 15.144 | 25.980 | 31.581 | 29.618 | 28.385 | |
| SSIM | 0.932 | 0.966 | 0.989 | 0.985 | 0.981 | |
| PSNR(dB) | 12.393 | 24.405 | 30.978 | 27.657 | 27.943 | |
| SSIM | 0.892 | 0.955 | 0.988 | 0.981 | 0.980 | |
| PSNR(dB) | 10.739 | 23.039 | 30.168 | 26.382 | 27.481 | |
| SSIM | 0.851 | 0.941 | 0.987 | 0.976 | 0.979 |
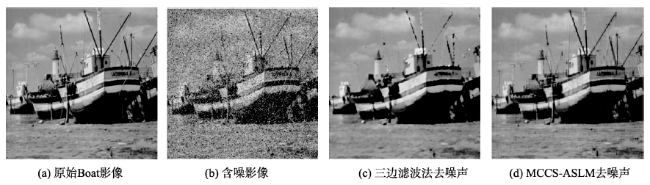
Fig. 4 Comparative results of noise removal on Boat image with p=0.3,σ=5/255图4 Boat图像去噪结果对比(p=0.3,σ=5/255) |
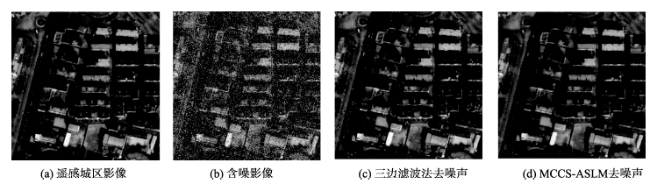
Fig. 5 Comparative results of the removal of mixed noise on urban image with p=0.2,σ=5/255图5 遥感城区影像混合去噪结果对比(p=0.2,σ=5/255) |
Fig. 6 Comparative results of different denoising methods on real RS image图6 真实遥感影像去噪结果对比 |
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
|
| [29] |
|
/
| 〈 |
|
〉 |

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}