
Journal of Geo-information Science >
Research on Spatial Objects Fast Visualization Based on GeoSOT-3D
Received date: 2014-12-29
Request revised date: 2015-05-21
Online published: 2015-07-08
Copyright
Earth observation technology has developed rapidly nowadays, accumulating a great amount of data for studying earth system science and other global issues. But when facing the massive, multi-source and multi-resolution global data, how could it be rationally organized and managed to improve the efficiency of data analysis has become a challange. The geospatial information subdivision organization, as a new organizational idea of spatial information, is regarded as a potential solution. Among various domestic and international geospatial information subdivision organization frameworks, the GeoSOT-3D subdivision framework, proposed by the team of Professor Cheng Chengqi from Peking University, has obtained extensive close attention. Nevertheless, the spatial data at global scale are often massive and rich in content, resulting in a contradiction that the amount of data to be processed is far beyond the processing ability of the computer when expressing geospatial objects. To solve this problem, this paper combines the geospatial information subdivision model with the existing 3D rapid visualization technology, and proposes a clipping and hidden face removal strategy assisted by the octree to achieve the rapid subdivision expression of geospatial objects based on the GeoSOT-3D. Taking the expression of space electromagnetic field for example, we developed a demo system and discussed the simulation results. The simulation results demonstrate that the proposed method exhibited a better effect and to some extent resolved the issue of efficiency in the expression of spatial objects.
Key words: subdivision; GeoSOT; expression; 3D visualization; octree
LI Zhiqiang , CHENG Chengqi , LI Shuang . Research on Spatial Objects Fast Visualization Based on GeoSOT-3D[J]. Journal of Geo-information Science, 2015 , 17(7) : 810 -815 . DOI: 10.3724/SP.J.1047.2015.00810
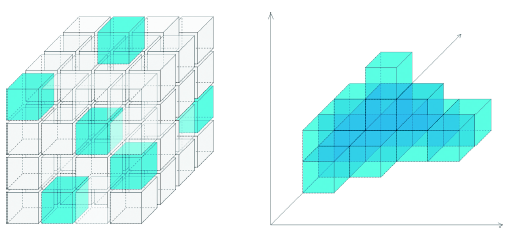
Fig. 1 The subdivision modeling of 3D spatial object图1 三维空间对象的剖分建模 |
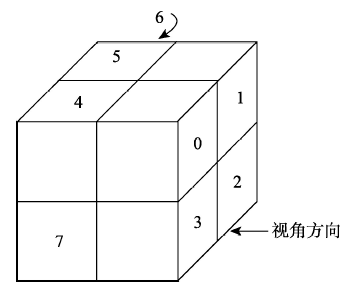
Fig. 2 The node structure of octree图2 八叉树结点示意 |
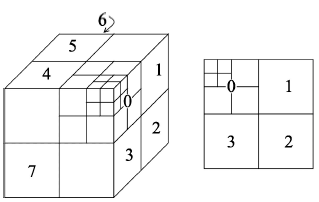
Fig. 3 Observe the octree from a particular direction图3 从特定方向观察八叉树 |
Fig. 4 Map the octree to the quadtree图4 将八叉树映射到四叉树 |
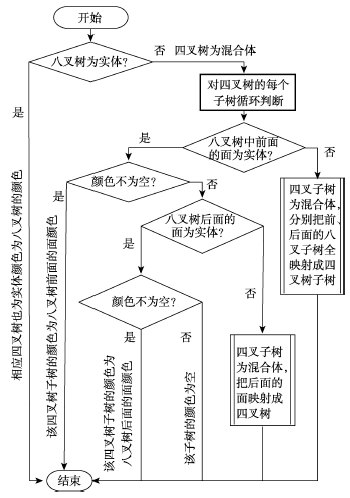
Fig. 5 The algorithm of transforming octree to the corresponding quadtree图5 空间八叉树向相应平面四叉树转换算法流程 |
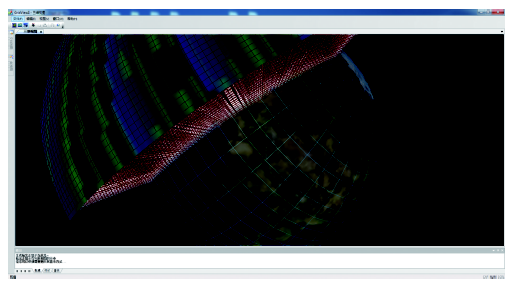
Fig. 6 The visualization expression of space electromagnetic field图6 空间电磁场可视化表达 |
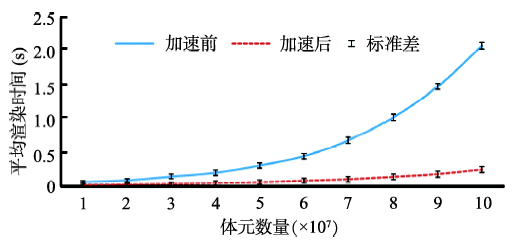
Fig. 7 The comparison of time before and after acceleration图7 加速前后耗费时间比较 |
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
/
| 〈 |
|
〉 |

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}