
Journal of Geo-information Science >
A Scheme of Extracting Information of Vortex Based on Floats
Received date: 2015-03-17
Request revised date: 2015-07-07
Online published: 2015-10-10
Copyright
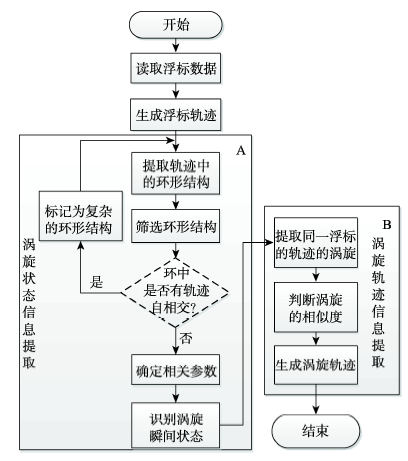
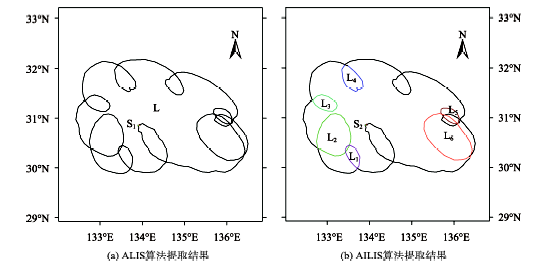
When a drifter is influenced by an eddy, its movement will be changed and the drifter may come back to the location where it stayed before. Then there will be loops appeared in the trajectories of the drifter. So we can extract eddies from the trajectories of the drifter by recognizing the loops in the trajectories. Based on this principle, this paper improved the ALIS method proposed by Dong[1] which neglects the complex structure in the results from the extraction of loops, although the complex structure may contain the movement of an eddy. We named this new algorithm AILIS (an improved automated loop identifying scheme). AILIS can further improve the extraction results by judging whether the trajectory segments in loops have self-intersection, and then it can track some parts of the movement of an eddy by judging the similarity between two eddy transient states. This paper made a comparison experiment between ALIS and the algorithm from Li[2] and also made an verification using the results from HD (Hybrid Detection) and HT (Hybrid Tracking) algorithms. The experiment result show that the algorithm proposed by this paper can obtain more transient states and movements of eddies, providing an important approach to obtain the physical parameters of the eddy.
Key words: eddy; recognize; complex structure; transient state; trajectory
WEI Haitao , DU Yunyan , XU Kaihui . A Scheme of Extracting Information of Vortex Based on Floats[J]. Journal of Geo-information Science, 2015 , 17(10) : 1207 -1214 . DOI: 10.3724/SP.J.1047.2015.01207
Fig. 1 Flow chart of the implementation of AILIS图1 AILIS算法实现流程图 |
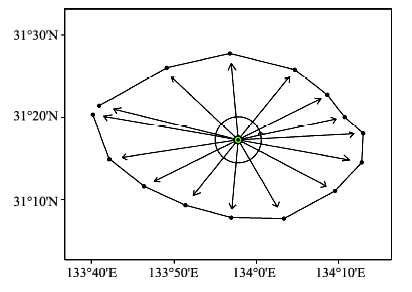
Fig. 2 Calculation method of vector angle and polarity judgement图2 旋转矢量角计算示意图 |
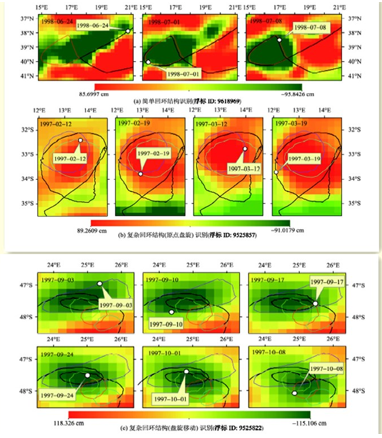
Fig. 3 Experiment results of AILIS图3 AILIS算法实验结果图 |
Fig. 4 Comparison of two algorithms on the extraction of complex loop图4 复杂回环结构2种算法对比图(浮标ID:43525) |
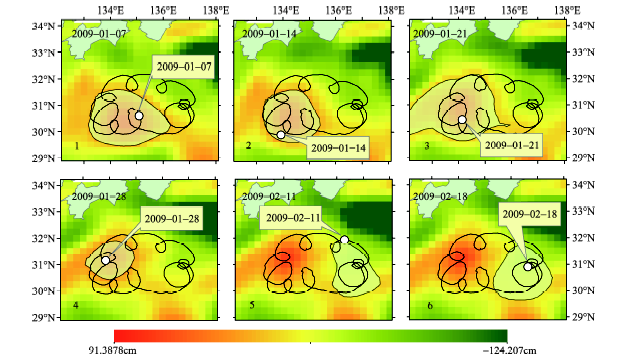
Fig. 5 Comparison of complex loop with SLA and the states of eddy图5 复杂回环与SLA、涡旋状态对比图(浮标 ID: 43525) |
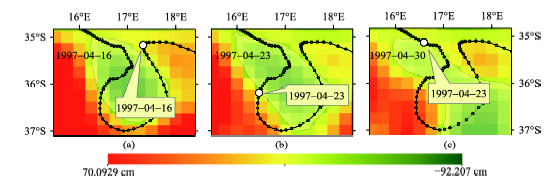
Fig. 6 The schematic structure图6 “雨滴”结构图(浮标 ID: 7703194) |
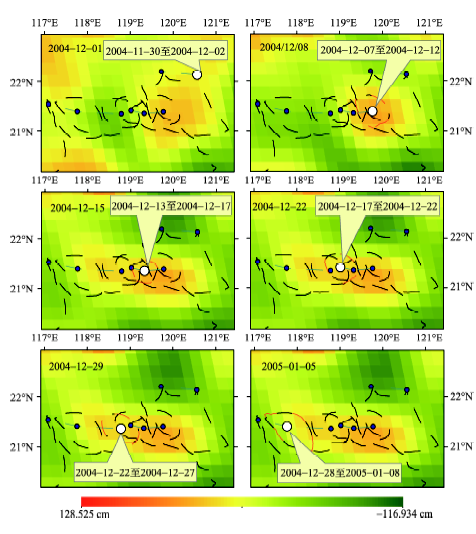
Fig. 7 Eddy movement tracking result of AILIS图7 AILIS算法涡旋轨迹追踪结果图(浮标 ID: 49698) |
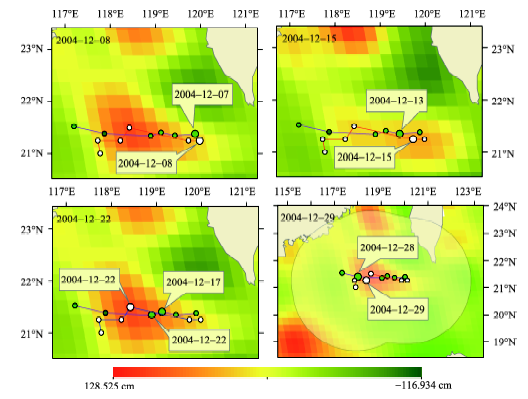
Fig. 8 Comparison of HT and AILIS on eddy movement tracking图8 AILIS算法与HT算法涡旋轨迹追踪结果对比图(浮标ID:49698) |
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}