
Journal of Geo-information Science >
Hierarchical Optimal Path Algorithm Based on Multi-Storey Building Space
Received date: 2015-06-29
Request revised date: 2015-08-17
Online published: 2016-02-04
Copyright
Due to the stratified feature according to the floors in the multi-storey building space, the indoor path analysis is different from the outdoor path analysis, and the impact of floors, such as space location information, should be taken into consideration when the indoor optimal path planning is being carried out. However, the traditional optimal path planning method, which is based on network topology model between nodes, does not incorporate the space concept, which cannot be well applied to indoor path analysis. Aiming at solving the problem of indoor optimal path planning, based on the hierarchical characteristics of multi-storey building space, a structured dynamic network analysis model is put forward and the hierarchical optimal path algorithm is realized in this paper. In the algorithm, the network of each floor and the connections between floors are all regarded as independent structure. Firstly, the set of stops is divided into several sub sets according to the floor-distribution. Then, the stop distribution of the first floor is recorded and the first floor is regarded as the starting floor of the hierarchical optimal path analysis, and the path analysis for two consecutive floors is carried out floor by floor through dynamically constructing the structure network model spanning across every two consecutive floors. After that, the optimal path traversing all stops in the multi-storey building space is obtained. Compared to the traditional optimal path algorithm, the experimental results show that the proposed algorithm can obtain a more reasonable result for path planning, and the time efficiency is significantly improved. In addition, the structured dynamic network analysis model is more flexible, which allows to define specific floor conversion rules based on different requirements. The algorithm can be applied to large public buildings in cities, so that the indoor path analysis can be connected with the outdoor path analysis, making a more comprehensive path analysis.
LIN Haojia , LUO Wenfei . Hierarchical Optimal Path Algorithm Based on Multi-Storey Building Space[J]. Journal of Geo-information Science, 2016 , 18(2) : 175 -181 . DOI: 10.3724/SP.J.1047.2016.00175
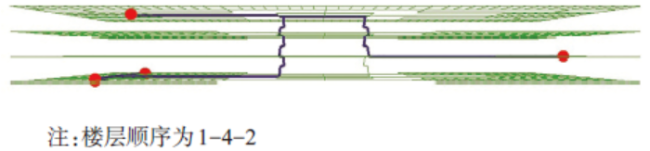
Fig. 1 The situation of “low floor-high floor-middle floor”图1 “低楼层-高楼层-中间楼层”情况 |
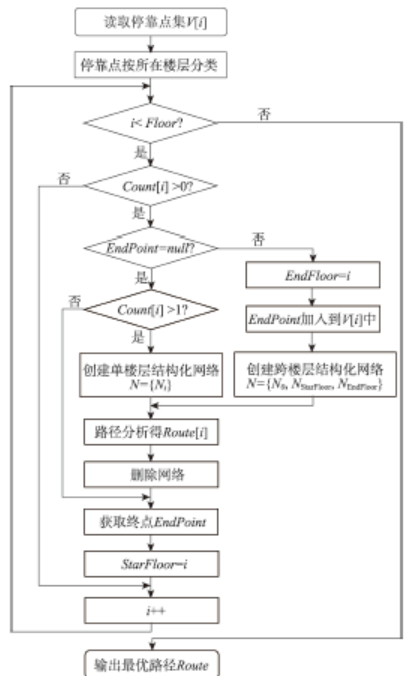
Fig. 2 Flowchart of hierarchical structured dynamic network optimal path analysis图2 分层结构化动态网络最优路径分析流程 |
Tab. 1 Comparison of path analysis results表1 路径分析结果对比表 |
| 数据 | 停靠点数目 | 分布楼层数 | 方法 | 楼层顺序 | 总长度 / m | 楼层转换成本 / W |
|---|---|---|---|---|---|---|
| ① | 2 | 2 | 全局 | 1-2 | 132.38 | 1 |
| 分层 | 1-2 | 132.38 | 1 | |||
| ② | 4 | 3 | 全局 | 1-4-2 | 308.42 | 5 |
| 分层 | 1-2-4 | 311.12 | 3 | |||
| ③ | 8 | 6 | 全局 | 1-2-7-5-10-12 | 805.34 | 15 |
| 分层 | 1-2-5-7-10-12 | 807.65 | 11 | |||
| ④ | 16 | 10 | 全局 | 1-3-4-7-6-9-10-9-13-14-16 | 1361.98 | 19 |
| 分层 | 1-3-4-6-7-9-10-13-14-16 | 1357.10 | 15 |
注:W表示相邻两楼层间的转换成本 |
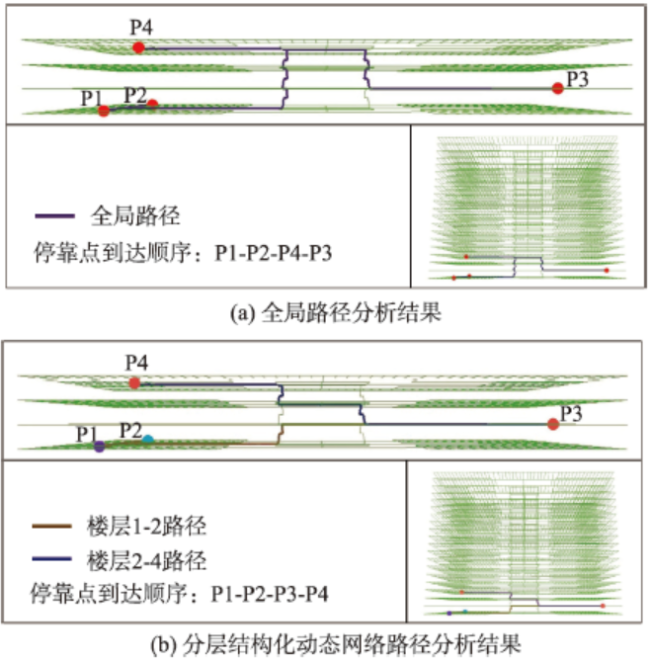
Tab. 2 The information of stops表2 停靠点信息 |
| 停靠点 | P1 | P2 | P3 | P4 |
|---|---|---|---|---|
| 楼层 | 第1层 | 第1层 | 第2层 | 第4层 |
| 方位 | 南面 | 北面 | 东面 | 西面 |
Tab.3 Comparison of the execution time of path analysis表3 路径分析执行时间对比表 |
| 数据 | 楼层总数K | 停靠点分布楼层数k | 停靠点数目 | T全局 (s) | T分层 (s) |
|---|---|---|---|---|---|
| ① | 5 | 1 | 2 | 0.2012 | 0.2654 |
| 2 | 4 | 0.4722 | 0.5794 | ||
| 5 | 8 | 0.8504 | 1.4303 | ||
| ② | 10 | 1 | 2 | 0.3903 | 0.2661 |
| 2 | 4 | 0.7811 | 0.5806 | ||
| 5 | 8 | 1.5632 | 1.4321 | ||
| ③ | 20 | 1 | 2 | 0.8123 | 0.2668 |
| 2 | 4 | 1.6421 | 0.5864 | ||
| 5 | 8 | 3.3608 | 1.4322 | ||
| 10 | 16 | 6.7803 | 2.8802 | ||
| ④ | 40 | 1 | 2 | 1.7011 | 0.2676 |
| 2 | 4 | 3.3203 | 0.5871 | ||
| 5 | 8 | 6.8415 | 1.4343 | ||
| 10 | 16 | 13.7352 | 2.8809 | ||
| 20 | 32 | 27.3613 | 5.8731 |
注:所有执行时间均通过多次进行求平均值,且包含起始楼层停靠点数目等于1或大于1的情况 |
Fig. 3 Comparison of path analysis results图3 路径分析结果对比图 |
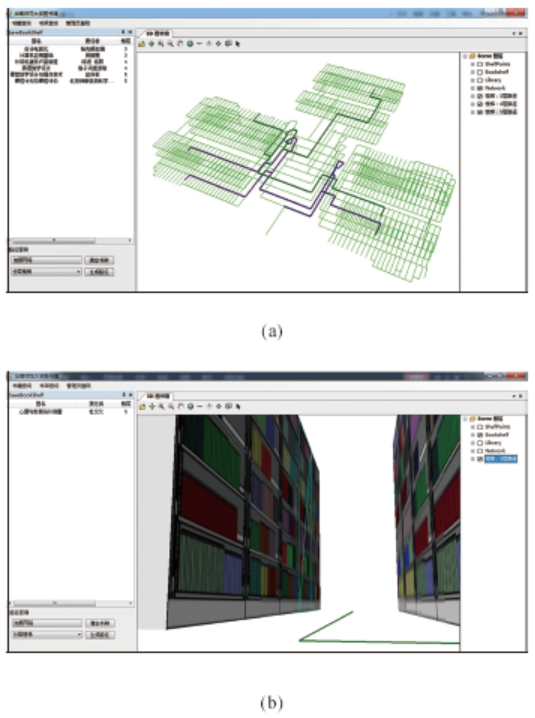
Fig.4 Application of this algorithm in a library case图4 在图书馆中的应用 |
The authors have declared that no competing interests exist.
| [1] |
[
|
| [2] |
[
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
[
|
| [9] |
|
| [10] |
[
|
| [11] |
|
| [12] |
[
|
| [13] |
[
|
| [14] |
[
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
ESRI. ArcGIS 10.2 for Desktop Help[M]. ArcGIS 10.2 for Desktop Help[M]. USA: ESRI Press, 2013.
|
| [20] |
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}