
Journal of Geo-information Science >
Refining and Robust Extraction of Roads from Mobile Laser Scanning Point Clouds
Received date: 2015-05-18
Request revised date: 2015-09-16
Online published: 2016-03-10
Copyright
Accurate three-dimensional road information has important significance in the fields of transportation, urban planning, road network construction, 3D road modeling and intelligent vehicle. For instance, in the field of intelligent vehicle, accurate three-dimensional road information can provide lane level road information for autonomous navigation. As a high-tech tool of surveying and mapping, mobile laser scanning can obtain 3D laser point cloud quickly and accurately and is suitable for road extraction and modeling in large-scale scenes. A robust method for extracting the refined three-dimensional road and its boundary from mobile laser scanning point clouds is proposed. First, the point cloud is self-adaptively partitioned according to the spatial feature of mobile laser point cloud. Then, the candidate road and its boundary are extracted based on the prior knowledge and rules. And the extracted road boundary is tracked and vectorized according to the linear feature of the road boundary. Finally, the road model parameters are computed by the extracted road and its boundary. Experiments were undertaken to evaluate the validities of the proposed method with three different scene datasets, including the highway, urban area and campus. The highway dataset contains a steep ramp and its point density is low, the urban dataset contains flower beds in the middle of the road, the campus dataset contains a great many of objects such as trees, pedestrians, cars et al and its point density is very high. The completeness, correctness, and quality of the extracted roads are over 91.29%, 93.15%, and 90.08%, respectively, which proves the proposed method is capable in various complex scenes with different point density, which is fast and robust to extract road and its boundary in large-scale scenes.
XIONG Weicheng , YANG Bisheng , DONG Zhen . Refining and Robust Extraction of Roads from Mobile Laser Scanning Point Clouds[J]. Journal of Geo-information Science, 2016 , 18(3) : 376 -385 . DOI: 10.3724/SP.J.1047.2016.00376
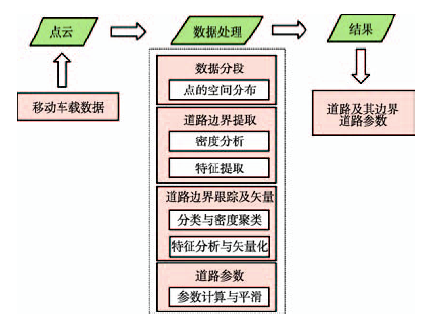
Fig. 1 Flowchart of road information extraction from mobile LiDAR points图1 道路信息提取流程 |
Fig. 2 Diagram of data partition图2 点云分段示意图 |
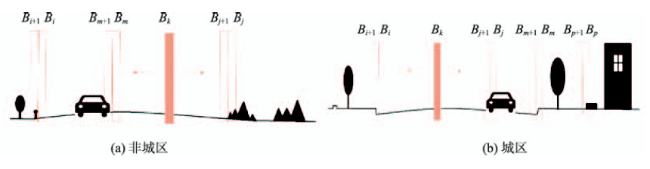
Fig. 3 Road border judgment图3 道路边界判断 |
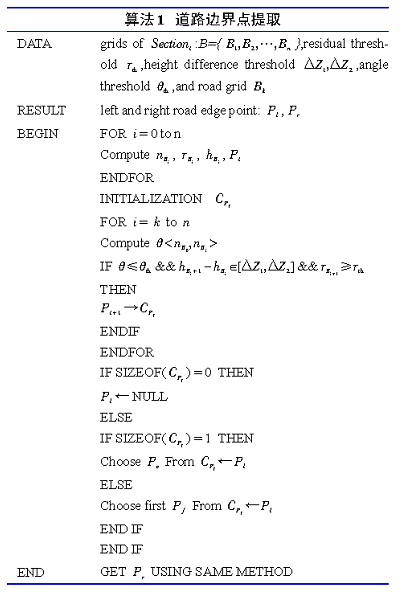
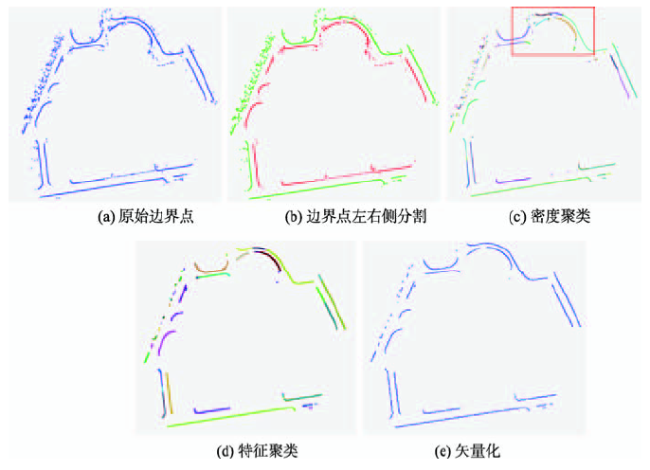
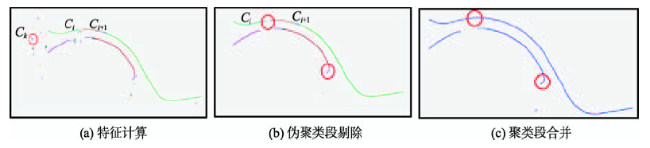
Fig. 4 Road border tracing and vectorization图4 边界跟踪及矢量化 |
Fig.5 Road feature analysis图5 道路特征分析 |
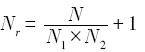
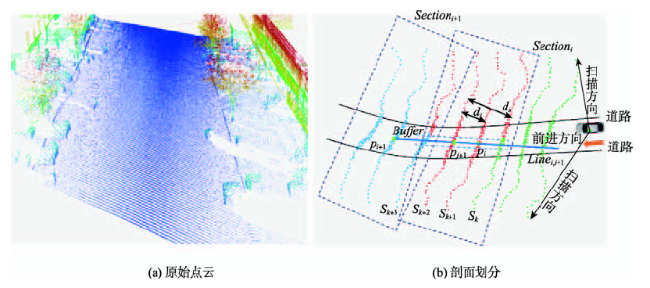
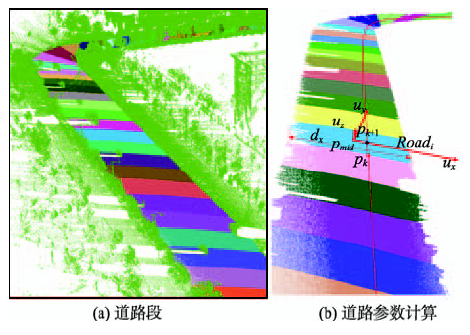
Fig. 6 Diagram of road partition图6 道路剖分示意图 |

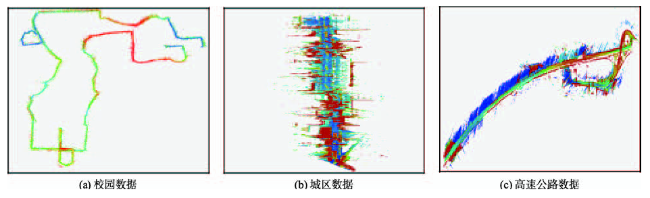
Fig. 7 Datasets of the raw data图7 原始数据 |
Tab. 1 Description of the experimental data表1 实验数据描述 |
| 特征 | ||||
|---|---|---|---|---|
| 数据 | 数据大小/GB | 点数/个 | 数据范围/ | 数据描述 |
| 校园数据 | 56.6 | 2 129 923 634 | 17261882 | 数据点密度大,特征复杂,含有大量的树及建筑物,校园内因车辆与行人密集,激光数据点中的道路存在大量的车辆,行人等,使得数据存在大量的遮挡现象,而且整个数据的地形起伏大 |
| 城区数据 | 0.84 | 32 123 587 | 3932113 | 数据点密度比较大,为典型的城区数据,含有大量的建筑物,树木,杆状物,篱笆等等,道路中央还存在非规则化的花坛,整个区域地形起伏不大 |
| 高速公路数据 | 0.22 | 6 734 500 | 29731578 | 数据点密度相对比较小,为高速公路数据,其区域高程起伏比较大,特别是匝道部分 |
Tab. 2 Setting of the data processing parameters表2 数据处理参数设定 |
 |
Tab. 3 Time of data processing表3 数据处理时间 |
| 时间/min | ||||
|---|---|---|---|---|
| 数据 | 数据分段 | 边界点提取 | 矢量化及道路参数计算 | 总计 |
| 校园数据 | 7.46 | 60.16 | 8.53 | 76.15 |
| 城区数据 | 0.22 | 1.72 | 0.32 | 2.26 |
| 高速公路数据 | 0.006 | 0.467 | 0.098 | 0.571 |
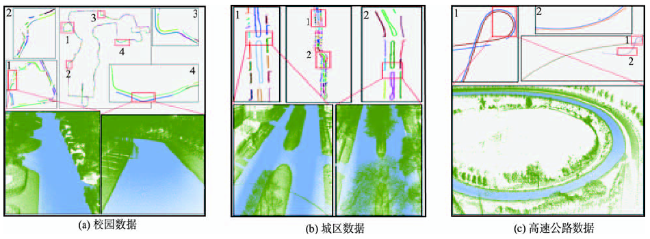
Fig. 8 Results of road and it's boundary extraction图8 道路及其边界提取结果 注:图8(a),(b),(c)上半部分表示提取到的道路边界,且边界已矢量化,不同颜色代表不同的道路段;下半部分中,蓝色为提取到的道路,绿色为其他目标 |
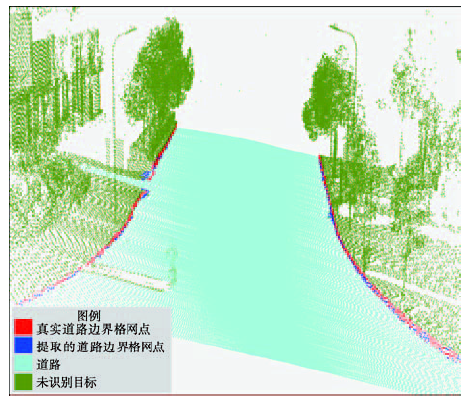
Fig. 9 The actual and extracted road boundary grids图9 真实与提取到的道路边界格网 |
Tab. 4 The accuracy of road and it's boundary extraction result表4 不同数据的道路及边界提取精度值(%) |
| 数据 | p | r | q | c |
|---|---|---|---|---|
| 校园数据 | 93.15 | 91.29 | 90.08 | 89.03 |
| 城区数据 | 97.86 | 95.54 | 92.21 | 91.24 |
| 高速公路数据 | 98.28 | 96.73 | 95.98 | 80.00 |
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
[
|
| [17] |
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}