
Journal of Geo-information Science >
A New Image Retrieval Method Based on Image Viewshed
Received date: 2016-05-12
Request revised date: 2016-07-01
Online published: 2016-08-10
Copyright
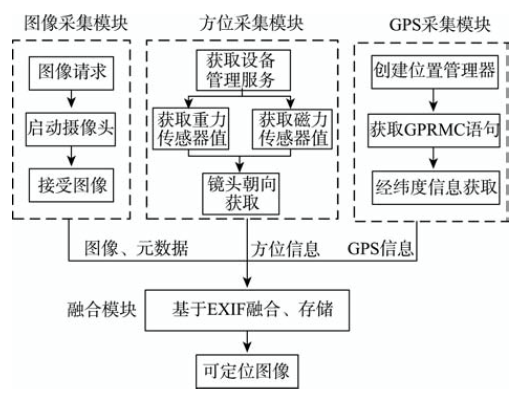
Image is a natural representation of the real world, which has the characteristics of intuitionistic expression and rich content. It has become an important visual data source in GIS data acquisition and application. With the rapid development of hardware terminal, the sensors integrated in mobile terminal become more abundant, and multi-sensor data fusion has become a trend in mobile GIS data collection. Aiming at the problem of obtaining azimuth deviation of mobile terminal, this paper emphasized on the acquisition algorithm of camera shooting directions, which was based on a gravity sensor and a magnetic sensor embedded in mobile terminals. Based on the EXIF format, locatable images were generated by the integrated collection of image metadata, location and direction. To overcome the disadvantages of existing modeling method of taking a surface as a point for locatable image, this paper proposed a method to build image viewshed by using image metadata, location and direction based on the model of lens’ angle of view. Multi-level grid was used to build the spatial index for the polygon feature of the image viewshed. Based on this method, a case study was conducted in Fujian province. In the experiment, 8022 locatable images were collected by field verification of remote sensing. Point based modeling and polygon based modeling were utilized to build the retrieved image set. Retrieval speed and results were compared and analyzed. It showed that the image retrieval results could be more accurate based on image viewshed modeling. It could retrieve images of which the actual shooting position located inside and outside of the retrieval area. Meanwhile, the image retrieval speed could increase 6.22 to 8.64 times by using the multi-level grid spatial index.
WU Yong , YAO Ling , TONG Weimin . A New Image Retrieval Method Based on Image Viewshed[J]. Journal of Geo-information Science, 2016 , 18(8) : 1030 -1036 . DOI: 10.3724/SP.J.1047.2016.01030
Fig. 1 Technology flowchart of the locatable image acquisition图1 可定位图像采集方法流程图 |
Tab. 1 The Parameters of the Locatable Image Model表1 可定位图像存储模型参数列表 |
| EXIF | 存储参数 | 参数描述及存储位置 |
|---|---|---|
| EXIF IFD | 图像高度 | 图像纵向像素数,存储于ImageLength标签 |
| 图像宽度 | 图像横向像素数,存储于ImageWidth标签 | |
| 拍摄时间 | 图像拍摄时间,存储于DateTime标签 | |
| 焦距 | 拍摄图像时镜头焦距长度,存储于FocalLength 标签 | |
| 水平视角 | 当前焦距下镜头水平视角,其值小于180°,以<水平视角>参数值</水平视角>存储于UserComment标签 | |
| 垂直视角 | 当前焦距下镜头垂直视角,其值小于180°,以<垂直视角>参数值</垂直视角>存储于UserComment标签 | |
| 放大倍数 | 图像拍摄时镜头数码变焦倍数,定焦时默认为0,变焦时为大于1的浮点数,储存于DigitalZoom标签 | |
| GPS IFD | 经度值 | 拍摄位置经度,存储于GPSLongitude标签 |
| 经度参考 | 经度参考,东经为“E”,西经为“W”,存储于GPSLongitudeRef标签 | |
| 纬度值 | 拍摄位置纬度,存储于GPSLatitude标签 | |
| 纬度参考 | 纬度参考,北纬为“N”,南纬为“S”,存储于GPSLatitudeRef标签 | |
| 拍摄方位 | 拍摄时镜头朝向,其值范围为0~360°,存储于GPSImgDirection标签 |
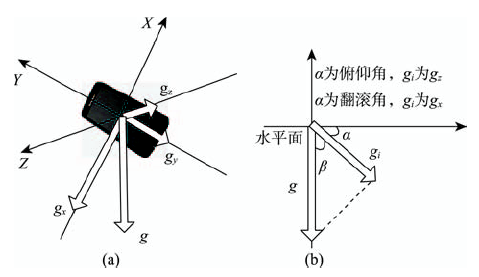
Fig. 2 Schematic diagram of relationship betweengravity and terminal posture图2 重力与终端姿态关系示意图 |
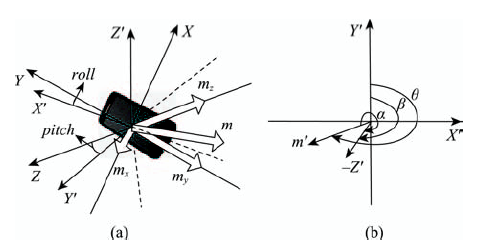
Fig. 3 Sketch map of inclination compensation and angle conversion图3 倾角补偿与角度换算示意图 |
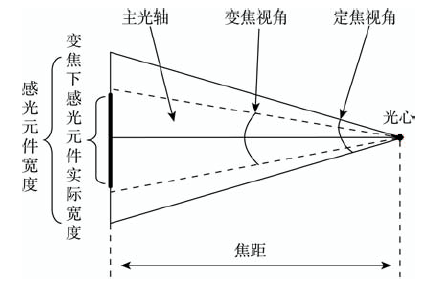
Fig. 4 Sketch map of the lens parametersunder the pinhole imaging图4 针孔成像下镜头参数关系示意图 |
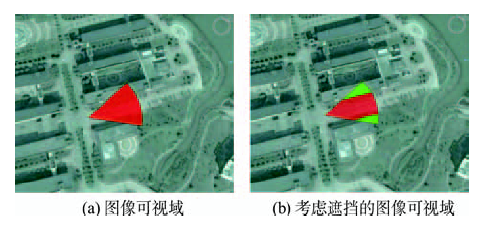
Fig. 5 Calculation results of image visual field图5 图像可视域计算结果图 |
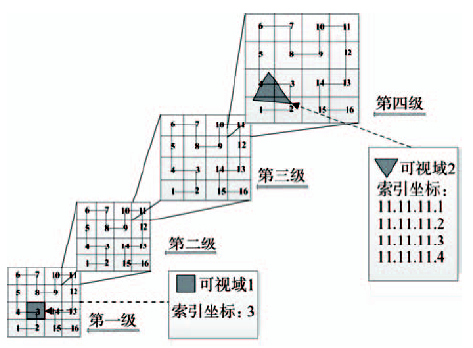
Fig. 6 Sketch map of space division and object location图6 空间划分与对象定位示意图 |
Tab. 2 Testing results of the locatable image retrieval表2 可定位图像检索测试结果 |
| 组 别 | 数据集构建方式 | 检索面积/km2 | 检索耗时/ms | 耗时比 (无索引/索引) | 检索结果/幅 | |
|---|---|---|---|---|---|---|
| 无索引 | 多级网格索引 | |||||
| 1 | 点模型 | 100.1 | 136.7 | 15.8 | 8.65 | 1 |
| 面模型 | 148.2 | 22.5 | 6.58 | 1 | ||
| 2 | 点模型 | 119.1 | 137.6 | 16.0 | 8.60 | 3 |
| 面模型 | 152.8 | 22.2 | 6.88 | 4 | ||
| 3 | 点模型 | 121.6 | 133.5 | 18.0 | 7.41 | 5 |
| 面模型 | 155.4 | 25.0 | 6.22 | 5 | ||
| 4 | 点模型 | 133.3 | 135.9 | 16.4 | 8.29 | 4 |
| 面模型 | 154.7 | 22.2 | 6.97 | 6 | ||
| 5 | 点模型 | 165.4 | 134.5 | 18.8 | 7.15 | 13 |
| 面模型 | 162 | 23.4 | 6.92 | 15 | ||
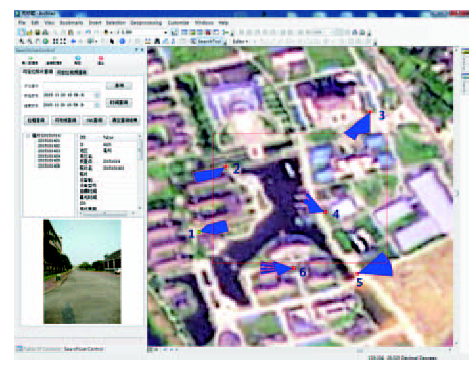
Fig. 7 Retrieval results of the locatable image图7 可定位图像检索结果 |
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
[
|
| [3] |
[
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
[
|
| [12] |
|
| [13] |
|
| [14] |
[
|
| [15] |
|
| [16] |
[
|
| [17] |
[
|
| [18] |
Jeita CP-3451. Exchangeable image file format for digital still cameras: Exif version 2.2[S]. Japan Electronics and Information Technology Industries Association, Tokyo: Jap, 2002:1-72.
|
| [19] |
|
| [20] |
[
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}