
Journal of Geo-information Science >
An Applicability Study of Covariance Localization Method in ETKF Data Assimilation
Received date: 2015-07-09
Request revised date: 2016-01-12
Online published: 2016-09-27
Copyright
To explore the applicability of the covariance localization method in the Ensemble Transform Kalman Filter (ETKF) scheme, we firstly analyze some difficulties of the covariance localization method applied to the ETKF scheme in theory. In order to solve the current problem, then we develop an approximate covariance localization method for ETKF, which is accomplished through the Schur product on ensemble perturbations, and finally we test the suitability and the effect of the approximate covariance localization method in ETKF by combining the Lorenz - 96 model. This model is often used to do performance evaluation in data assimilation. The results show that the covariance localization method cannot be directly applied to ETKF assimilation, although it can eliminate some spurious correlations in the background error covariance matrix and increase the rank of the background error covariance matrix. Because the effective object of Schur product in the covariance localization method is the background error covariance matrix, but the update equations of the ETKF only contain the ensemble perturbation matrix, excluding the background error covariance matrix. Moreover, the dimensions between the correlation coefficient matrix and the ensemble perturbation matrix are different, so an approximate covariance localization method is developed. By the experiment, it shows that the approximate covariance localization method can be applied in the ETKF, but the approximate Schur product disrupts the dynamic balances of ETKF assimilation system ,which leads to bad assimilation results. The local analysis method is widely used to solve the localization problem in data assimilation systems, so we try to apply it into the ETKF scheme. The results show that the local analysis method can be directly applied to ETKF, it can remove the spurious correlations in background error covariance matrix and obtain better assimilation results. This paper is a theoretical innovation and experimental exploration, it helps the related researchers to do further studies on the localization in the data assimilation.
Key words: covariance localization; ETKF; assimilation; spurious correlations
HAN Pei , SHU Hong , XU Jianhui , WANG Jianlin . An Applicability Study of Covariance Localization Method in ETKF Data Assimilation[J]. Journal of Geo-information Science, 2016 , 18(9) : 1184 -1190 . DOI: 10.3724/SP.J.1047.2016.01184
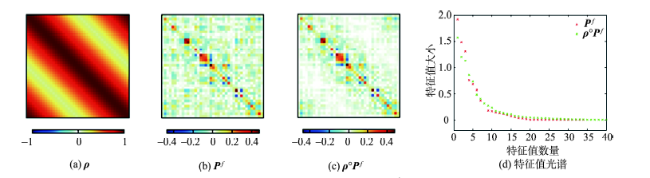
Fig.1 CL method′s impact on the background error covariance matrix图1 CL方法对背景误差协方差矩阵的影响 |
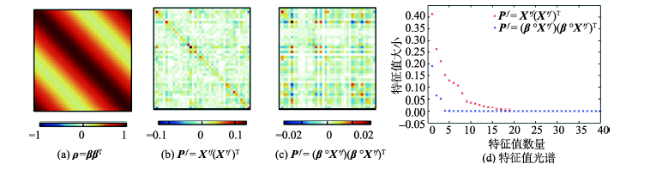
Fig.2 CL_new method’s impact on the background error covariance matrix图2 CL_new方法对背景误差协方差矩阵的影响 |
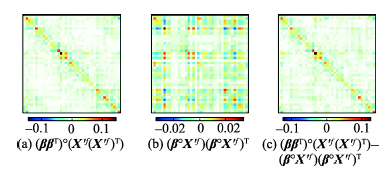
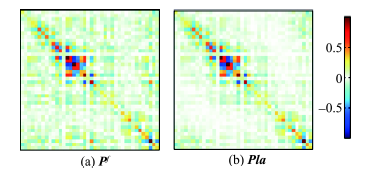
Fig.3 Approximation between CL_new and CL图3 CL_new方法和CL方法的近似程度 |
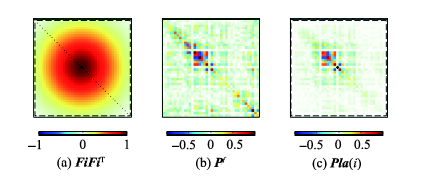
Fig.4 LA method′s impact on the background error covariance matrix图4 LA对背景误差协方差矩阵的影响 |
Fig.5 Global background error covariance matrix图5 全局背景误差协方差矩阵 |
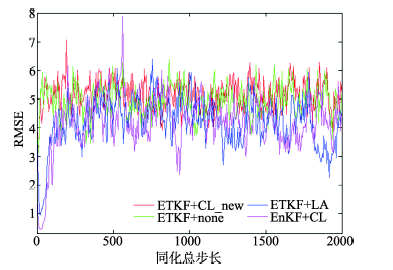
Fig.6 The data assimilation effects of different localization methods图6 不同局地化方法的同化效果 |
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
[
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}