
Journal of Geo-information Science >
Three-Dimensional Reconstruction of Large Multilayer Overpass Using Airborne LiDAR Data
Received date: 2015-10-26
Request revised date: 2016-04-18
Online published: 2016-09-27
Copyright
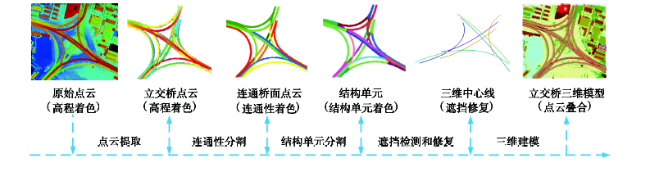
Three-dimensional (3D) model data of overpasses is significant for traffic navigation, landscape design, and many other applications. In this study, we explore the potential of using airborne light detection and ranging (LiDAR) data for the 3D reconstruction of large multilayer overpasses. To reduce the technical difficulty of this 3D reconstruction process, we propose a concept of “structure unit”. The “structure unit” represents a contiguous object with a consistent width, but does not include the bifurcation and/or intersection structures. A new technical framework, based on the structure units, is proposed to reconstruct the 3D models of large multi-layer overpass using the airborne LiDAR data. First, the overpass points are extracted from the raw LiDAR data by using a Reversed Iterative Mathematic Morphological (RIMM) method and inputting the area of overpass. Then, the hierarchal segmentation strategy, including the connectivity-based segmentation and the determination of structure units, is used to determinate the structure units from the overpass points. The central line of each structure is derived by the binarization and vectorization operations. And the obscured structures are detected and restored based on the central lines of the overpass. Finally, the complete 3D model of the overpass can be obtained by using the complete central line and the corresponding width value. Experiments were carried out to evaluate the validities of the proposed method on two different overpasses. The completeness rates of the 3D models of overpasses A and B are 92.77% and 94.58%, respectively. And the correctness rates of the 3D models of overpasses A and B are 98.84% and 98.97%, respectively. The experimental results indicate that the proposed method can provide satisfactory 3D models for large complex overpasses, and is capable to restore the occluded structures with high quality result.
Key words: LiDAR; overpass; three-dimensional reconstruction; structure unit
WU Yang , CHENG Liang , CHEN Yanming , LI Manchun . Three-Dimensional Reconstruction of Large Multilayer Overpass Using Airborne LiDAR Data[J]. Journal of Geo-information Science, 2016 , 18(9) : 1249 -1258 . DOI: 10.3724/SP.J.1047.2016.01249
Fig.1 Flowchart of the reconstructed overpass model图1 立交桥模型重建流程 |
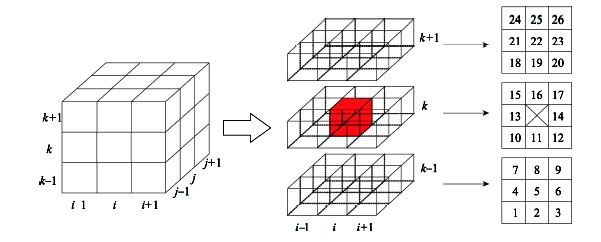
Fig.2 26 neighbors of a voxel图2 体元26邻域 |
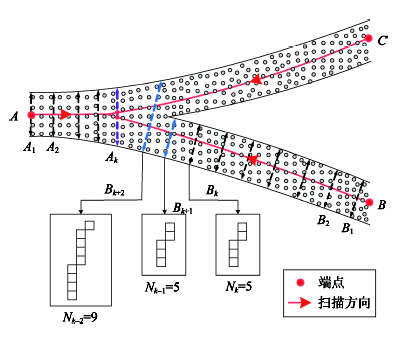
Fig.3 Segmentation for detecting structure units图3 结构单元分割 |
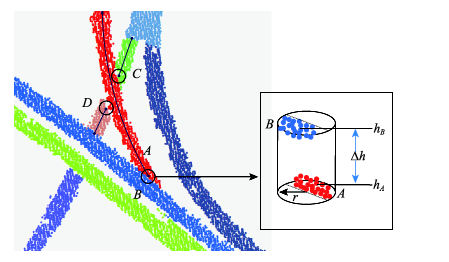
Fig.4 Detection of obscured structures图4 遮挡结构检测 |
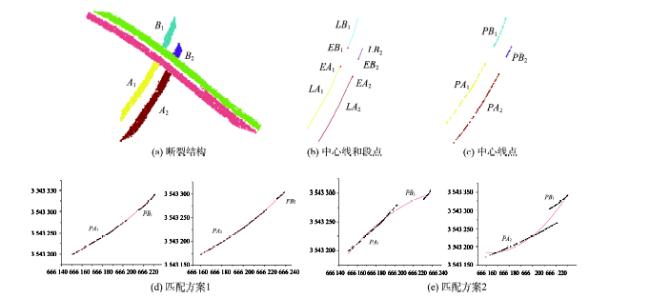
Fig.5 Matching of fractured structures图5 断裂结构单元匹配 |
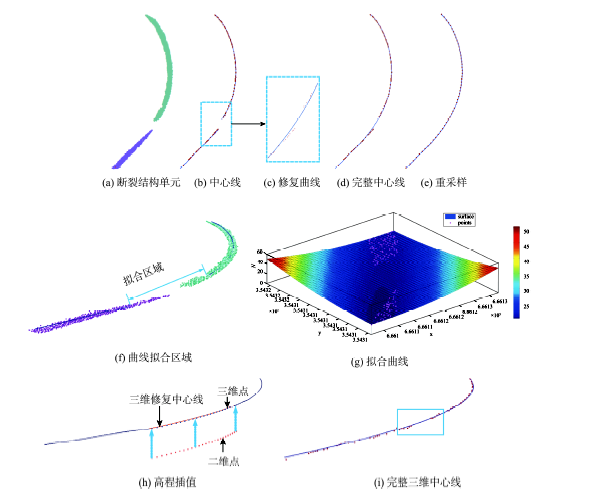
Fig.6 Restoration of fractured structures图6 断裂结构修复 |
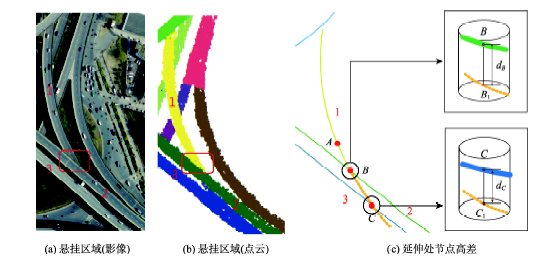
Fig.7 Restoration of a suspended structure图7 悬挂结构修复 |
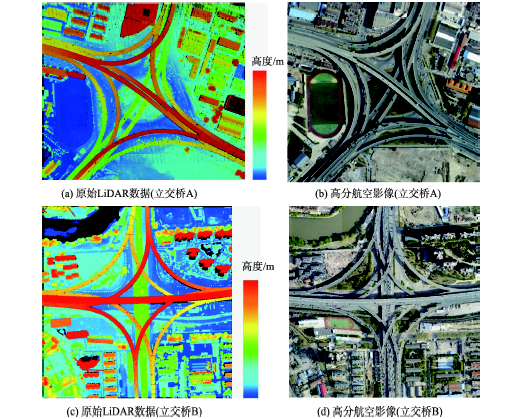
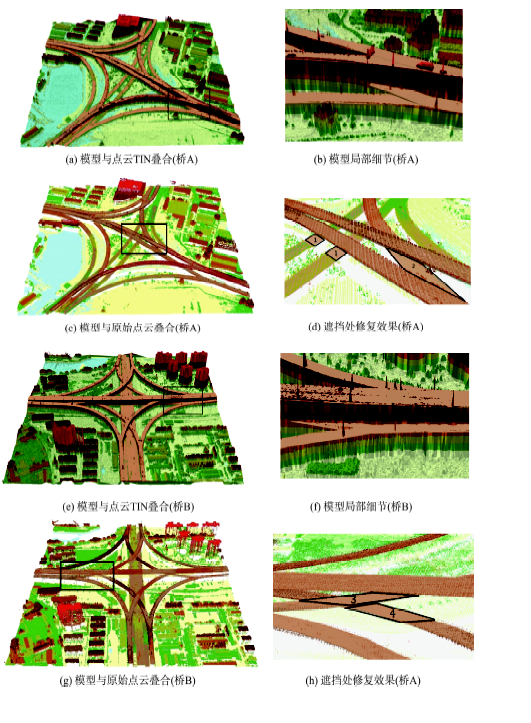
Fig.8 Experimental data图8 实验数据 |
Fig.9 3D overpass model图9 立交桥三维模型 |
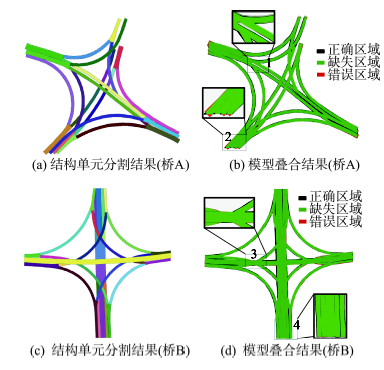
Fig.10 Quality evaluation of 3D overpass model图10 立交桥模型质量评价 |
Tab.1 Correctness and completeness of the reconstructed model (quantity and area)表1 立交桥模型正确率与完整率(数量和面积) |
| 重建模型 | 正确 | 遗漏 | 错误 | 正确率/(%) | 完整率/(%) | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 数量 | 面积/m2 | 数量 | 面积/m2 | 数量 | 面积/m2 | 数量 | 面积 | 数量 | 面积 | |||||
| 立交桥A | 30 | 44 657.46 | 0 | 3481.45 | 0 | 526.30 | 100 | 92.77 | 100 | 98.84 | ||||
| 立交桥B | 34 | 60 372.01 | 0 | 3457.44 | 0 | 624.75 | 100 | 94.58 | 100 | 98.97 | ||||
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
directional mathematical morphology for the detection of the road network in very high resolution remote sensing images[J]. Pattern Recognition Letters, 2010,31(10):1120-1127.
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
[
|
| [12] |
|
| [13] |
[
|
| [14] |
[
|
| [15] |
[
|
| [16] |
|
| [17] |
|
| [18] |
[
|
| [19] |
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}