
Journal of Geo-information Science >
A Realization Method of Navigation Electronic Map for Ground Station based on OpenStreetMap and 90 m SRTM
Received date: 2016-12-09
Request revised date: 2017-04-27
Online published: 2017-07-10
Copyright
Navigation electronic map is the only platform for operators to monitor unmanned vehicles. It is also an important information source for route planning as well as auto decision making. A navigation electronic map which covers wide territory and of high precision can provide more details and is an indispensable guarantee for a ground station task. Nowadays, the implementations of navigation electronic maps for unmanned vehicles are mainly based on secondary development on both online and offline map server platforms. These implementations may bring inevitable drawbacks. For one thing, map data and corresponding software such as MapX are very expensive. Even so, the map data always lacks flexibility for personal extensions such as altitude. Besides, the installation and configuration increases much difficulty for the ground station software developers. Finally, online platforms always rely on stable and high-speed Internet network environment, which is not always satisfied. With the development of free and open source geographic data and tools, individuals can easily modify and even construct their own map servers based on their individual needs. In this paper, we provide a new method to implement a navigation electronic map based on a widely crowd sourced map, which is called OpenStreetMap. Firstly, we set up a background tile service using raw OSM data. Then, we render 90 m SRTM data to a bunch of hill-shading and color coding raster files and define the rendering formats and layers in the configure file of the service style for each raster hill-shading and color coding file. Finally, we implement a client module in ground station to request tiles from the background service and present the map in the user interface. The navigation electronic map we implement covers all 0-18 zoom levels of the whole China and it provides 0-13 zoom levels of vivid topographic information and free of Internet limit. Besides, this navigation map we implement can also render other DEM sources and any other raster-format files, such as population, vegetation, precipitation and so on.
Key words: ground station; navigation electronic map; OpenStreetMap; 90 m SRTM
SONG Xiaohu , ZHU Jihong . A Realization Method of Navigation Electronic Map for Ground Station based on OpenStreetMap and 90 m SRTM[J]. Journal of Geo-information Science, 2017 , 19(7) : 901 -908 . DOI: 10.3724/SP.J.1047.2017.00901
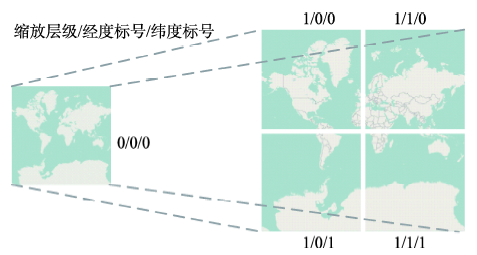
Fig. 1 General view of the tile pyramid图1 瓦片金字塔示意图 |
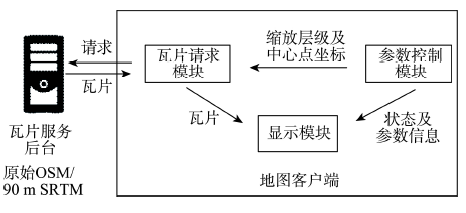
Fig. 2 Implementation framework of the navigation electronic map图2 导航电子地图实现框架 |
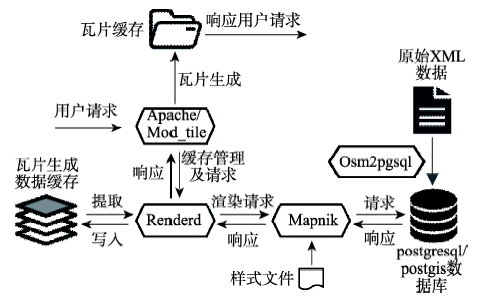
Fig. 3 Framework of the tile server background图3 瓦片服务后台框架 |
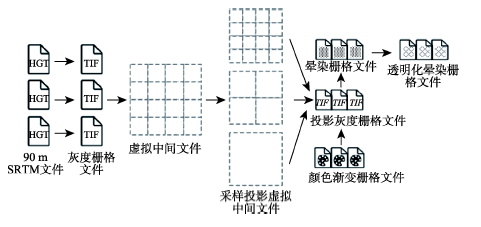
Fig. 4 Processing flow of color coding and hill-shading raster files图4 颜色渐变和晕染栅格文件处理流程 |
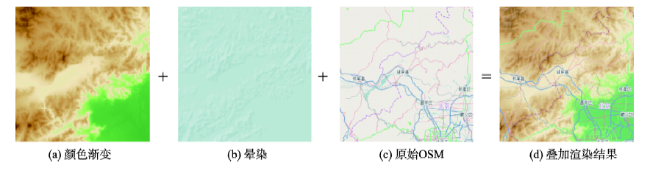
Fig. 5 General view of the background tile rendering图5 后台瓦片渲染示意图 |
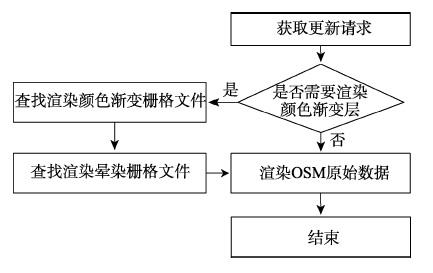
Fig. 6 Rendering process of the tile server background图6 瓦片服务后台的渲染流程 |
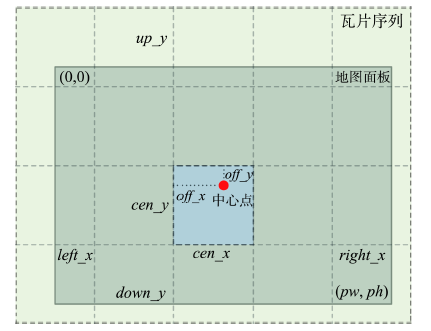
Tab. 1 Variables used in the map client module表1 地图客户端模块中所使用的变量 |
| 变量 | 描述 |
|---|---|
| lon | 地图中心点的经度 |
| lat | 地图中心点的纬度 |
| z | 当前缩放层级 |
| fx | 地图中心点所在瓦片经度标号计算值 |
| fy | 地图中心点所在瓦片纬度标号计算值 |
| cen_x | 地图中心点所在瓦片的经度标号 |
| cen_y | 地图中心点所在瓦片的纬度标号 |
| off_x | 地图中心点经度坐标在所在瓦片的偏移 |
| off_y | 地图中心点纬度坐标在所在瓦片的偏移 |
| w | 瓦片的宽度,即256 |
| h | 瓦片的高度,即256 |
| pw | 窗口的宽度 |
| ph | 窗口的高度 |
| left_x | 地图面板最左侧瓦片的经度标号 |
| right_x | 地图面板最右侧瓦片的经度标号 |
| up_y | 地图面板最上方瓦片的经度标号 |
| down_y | 地图面板最下方瓦片的经度标号 |
Fig. 7 General view of the tile plotting in the map client module图7 地图客户端瓦片绘制示意图 |
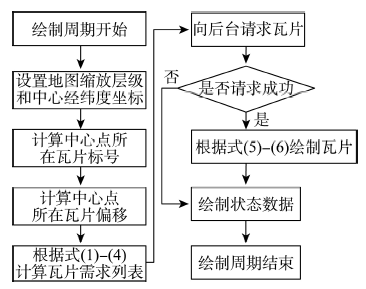
Fig. 8 A plotting period of the map client module图8 地图客户端模块绘制周期 |
Tab. 2 Information of the raster files after processing表2 处理后的栅格文件信息 |
| 5760 m C | 5760 m S | 720 m C | 720 m S | 90 m C | 90 m S | |
|---|---|---|---|---|---|---|
| 文件数量/个 | 2 | 2 | 63 | 63 | 3300 | 3300 |
| 大小 | 3.3 M | 4.4 M | 221.2 M | 295.5 M | 13.2 G | 2.94 G |
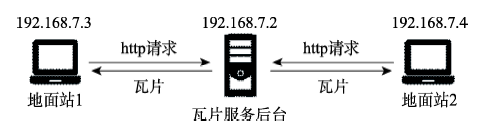
Fig. 9 Ground station software requesting tile services from the backstage supporter图9 地面站软件向后台请求瓦片服务 |
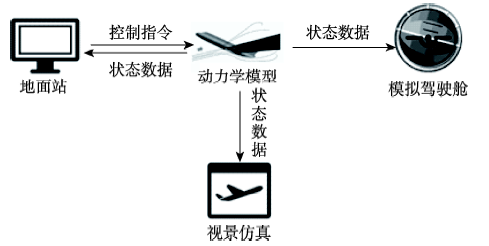
Fig. 10 A simulation system of the UAV flight dynamics图10 某型无人机动力学仿真系统 |
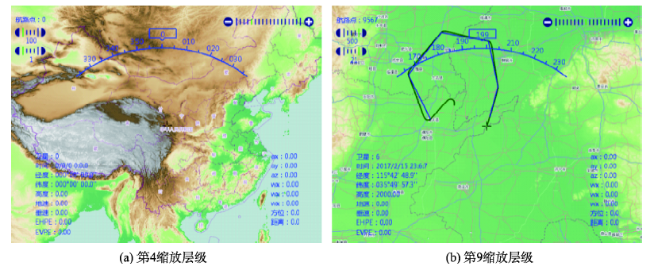
Fig. 11 The display effect of a map panel at different zoom levels图11 不同缩放层级下的导航地图显示效果 |
The authors have declared that no competing interests exist.
| [1] |
[
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
[
|
| [6] |
[
|
| [7] |
[
|
| [8] |
[
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
[
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}