
Journal of Geo-information Science >
The Research on Automatic Blur Detection in UAV Image
Received date: 2016-07-06
Request revised date: 2017-01-05
Online published: 2017-07-10
Copyright
With the development of technology, the Unmanned Aerial Vehicle (UAV) is widely used for scientific activities. Image acquisition is its main function. The bad image quality can affect processing results. Image blur is a key indicator of image evaluation. It determines quality and accuracy of the image. If the blurred UAV images are used in the subsequent calculation and processing, the results will be unreliable and unrobustness. This is even a serious error. As a result, the detection of blurred image is of great significance to use. The reason of image blurring has 4 kinds of factors. They are weather conditions, UAV platforms, camera systems and environments. The weather conditions mainly include rain and wind. The UAV platforms mainly are GPS signal intensity. They can make unstable position for UAV. The camera systems mainly include parameters setting of camera, such as focal length, ISO, shutter speed and aperture value. Environments mainly include terrain and illumination. Undulating terrain and different illumination intensity maybe lead to focus inaccuracy. These factors also make image blurring. According to the cause of blurring, there are motion blur and defocus blur. The traditional methods of detecting image blur are mainly based on manual inspection and qualified reference images in the process of evaluation. However, this method is considerably time-consuming and laborious. It is not suitable for a great number of UAV images processing. This paper used the four directions of Sobel edge detection algorithm for building basic evaluation principle, finding blur neighborhood width of each Sobel edge detection point in whole image. Finally, constructing the calculation guidelines of blur neighborhood width. The average value of the blur neighborhood width is calculated by sum and average operation for each sobel edge detection point, and used this value as a direct basis of detecting image blur. The average blur neighborhood width is a dimensionless value. It is affected by richness of image information. So it cannot be used to direct comparison as an absolute reference value. It can also be used for relatively comparison between the similar images, which has approximate richness of image information. Meanwhile, taking into account the characteristics of the UAV images, they have a certain overlap and series. We put time-adjacent images as mutual referenced images because the time-adjacent images have the similar richness of image information. By relatively comparing the changes of blur neighborhood width, when the change is more than a certain threshold, the blurred images have been determined. According to this method, the whole image has been detected. Through a number of experiments, the whole 4 thresholds have been determined. There are m=5, T=5, T1=0.2 and T2=0.167. These thresholds can also be used to UAV image blur detection. Finally, we processed 2322 images of different feature types. There are hill, urban, mountain and plain. They were divided into 7 groups with automatic detection. 151 images was blurred while 158 images was blurred by manual inspection as the correct detection results. The average rate of detection was 95.57%. The detection method has a strong applicability.
Key words: UAV; automatic blur detection; blur neighborhood width; edge detection; Sobel
WEI Lai , HU Shunqiang , CHEN Cheng , HU Zhuowei , ZHAO Wenji . The Research on Automatic Blur Detection in UAV Image[J]. Journal of Geo-information Science, 2017 , 19(7) : 962 -971 . DOI: 10.3724/SP.J.1047.2017.00962
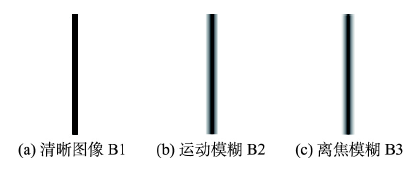
Fig. 1 Blur and original images of different types图1 不同类型的模糊图像与原始清晰图像 |
Tab. 1 The distribution of pixel data of horizontal direction in 3 images表1 3幅图像水平方向上的像元灰度值分布 |
| 类型\像元列 | … | 14 | 15 | 16 | 17 | 18 | 19 | 20 | 21 | 22 | 23 | 24 | 25 | 26 | 27 | … |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
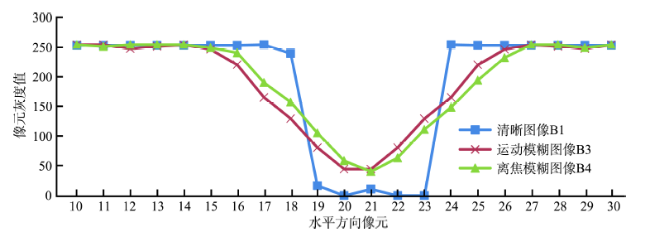
| 清晰图像B1 | … | 254 | 254 | 254 | 255 | 240 | 17 | 0 | 11 | 0 | 0 | 255 | 254 | 254 | 254 | … |
| 运动模糊B2 | … | 255 | 247 | 221 | 166 | 130 | 81 | 45 | 45 | 81 | 130 | 166 | 221 | 247 | 255 | … |
| 离焦模糊B3 | … | 255 | 250 | 241 | 191 | 158 | 106 | 59 | 41 | 64 | 112 | 149 | 195 | 233 | 255 | … |
Fig. 2 The trend of pixel data of horizontal direction in 3 images图2 3幅图像水平剖线上像元的灰度值分布趋势 |
Fig. 3 Binarization images图3 二值化边缘检测后的图像 |
Fig. 4 The trend of pixel data of horizontal profile and sobel edge line图4 图像水平剖线上像元灰度值变化趋势与边缘线位置关系 |
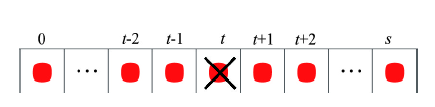
Fig. 5 The pixel distribution图5 像元分布示意图 |
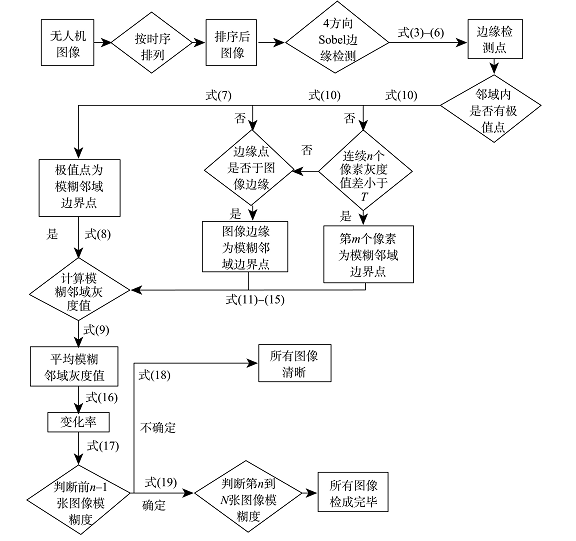
Fig. 6 The diagram of automatic blur detection图6 自动模糊检测算法流程 |
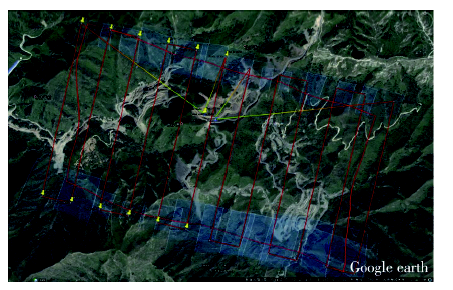
Fig. 7 The flight route map of UAV图7 无人机飞行航线图 |
Tab. 2 Accuracy verification data表2 精度验证数据 |
| 图像分组号 | 无人机型号 | 相机型号 | 飞行时间 | 飞行地区 | 图像数量/张 |
|---|---|---|---|---|---|
| 1 | Unknown | Nikon D800 | 2013-10-24 | 丘陵 | 148 |
| 2 | Md4-1000 | Sony ILCE-7R | 2014-07-22 | 城市 | 173 |
| 3 | Md4-1000 | Sony NEX-7 | 2014-12-17 | 山区 | 462 |
| 4 | Unknown | Canon 500D | 2014-12-23 | 平原 | 40 |
| 5 | Md4-1000 | Sony ILCE-6000 | 2015-08-24 | 山区 | 711 |
| 6 | Dji Phantom4 | FC330 | 2016-06-02 | 山区 | 368 |
| 7 | Dji Phantom4 | FC330 | 2016-05-22 | 平原 | 420 |
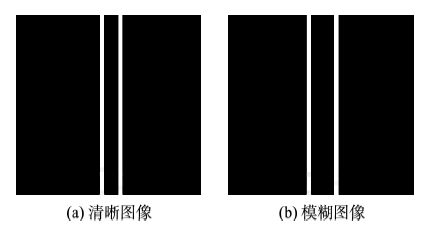
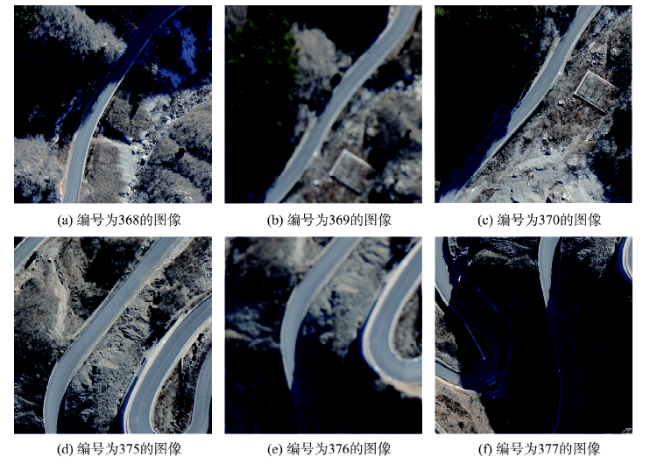
Fig. 8 The comparison of clear and blur images图8 图像对比 |
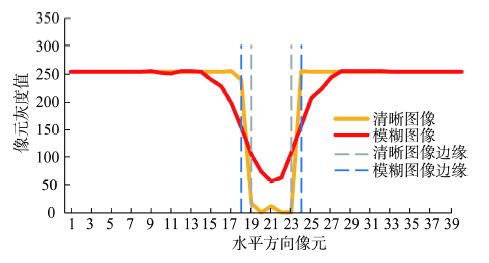
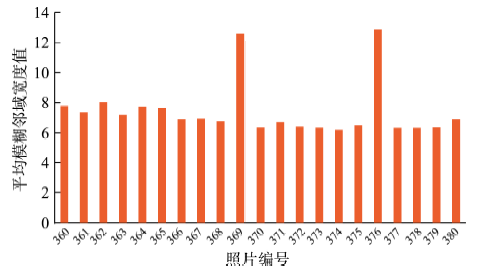
Fig. 9 Calculation results图9 计算结果 |
Tab. 3 The results of blur detection表3 模糊检测结果 |
| 图像 分组号 | 图像 总数/张 | 自动检测 模糊图片数/张 | 人工检查 模糊图片数/张 | 检测率/% |
|---|---|---|---|---|
| 1 | 148 | 11 | 11 | 100 |
| 2 | 173 | 14 | 15 | 93.33 |
| 3 | 462 | 25 | 27 | 92.60 |
| 4 | 40 | 2 | 2 | 100 |
| 5 | 711 | 23 | 23 | 100 |
| 6 | 368 | 35 | 38 | 92.10 |
| 7 | 420 | 41 | 42 | 97.62 |
The authors have declared that no competing interests exist.
| [1] |
[
|
| [2] |
[
|
| [3] |
|
| [4] |
[
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
[
|
| [9] |
[
|
| [10] |
[
|
| [11] |
[
|
| [12] |
[
|
| [13] |
[
|
| [14] |
|
| [15] |
[
|
| [16] |
[
|
| [17] |
[
|
| [18] |
Irwin Sobel. History and Definition of the Sobel Operator[EB/OL]., 1998-02-06.
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}