
Journal of Geo-information Science >
Dihedral Angle Filtering Algorithm for Airborne LiDAR Point Cloud Data
Received date: 2017-10-17
Request revised date: 2018-02-28
Online published: 2018-04-20
Supported by
National Natural Science Foundation of China, No.41671417
General Project of Science and Technology Plan of Beijing Municipal Education Committee, No.KM201610028013.
Copyright
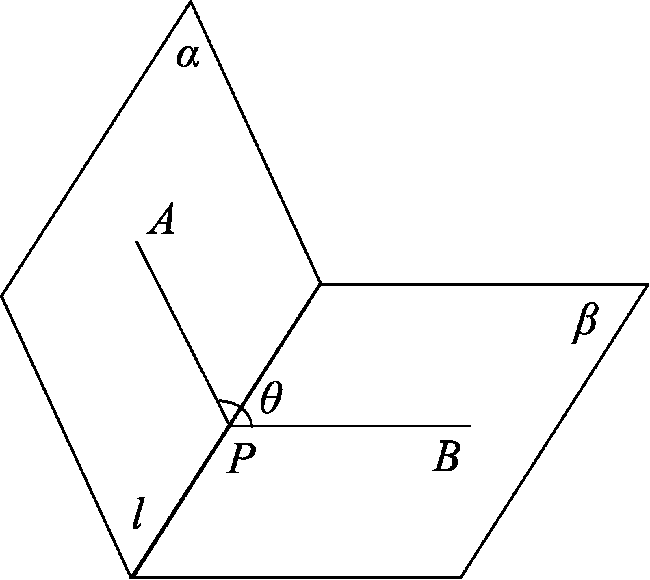
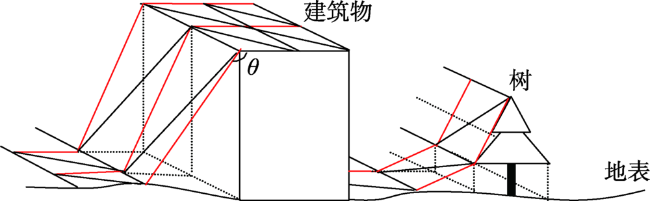
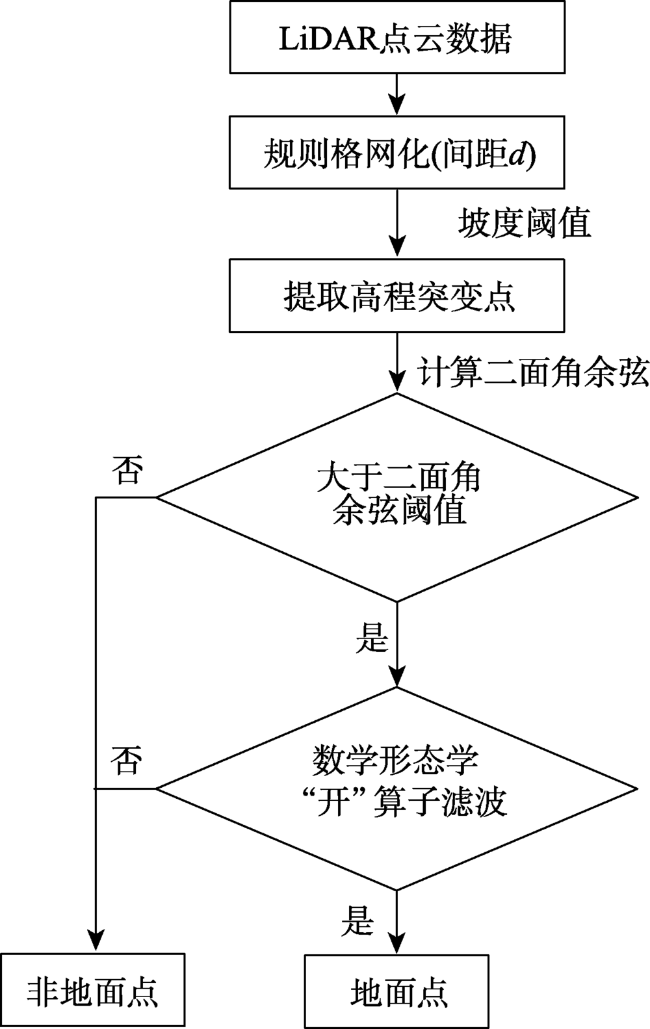
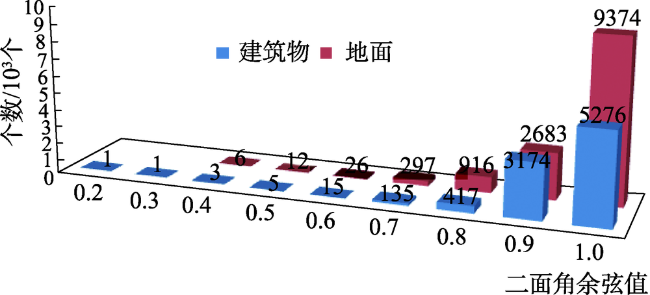
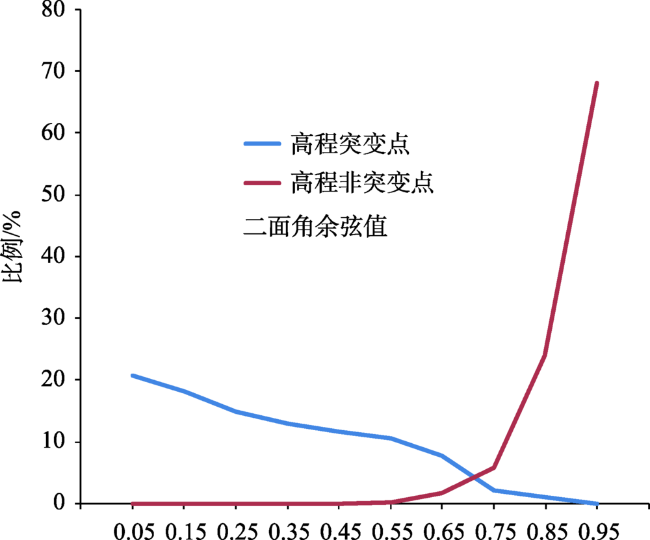
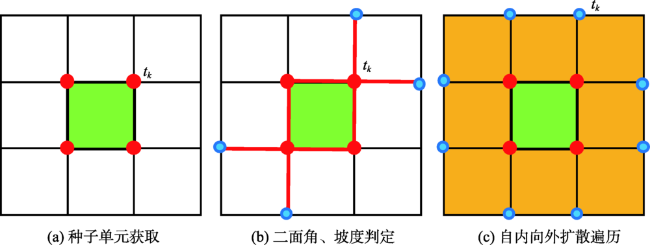
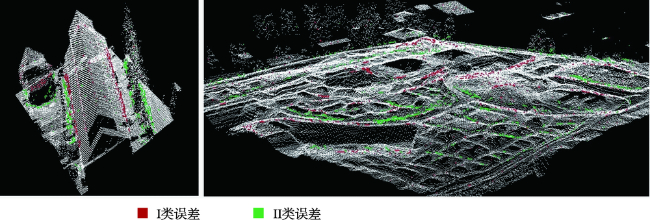
Airborne LiDAR is one kind of the technologies for obtaining ground surface DEM. On the analysis of the airborne LiDAR point cloud filtering algorithms, this paper proposes a new filtering algorithm-dihedral filtering. The algorithm is based on the theory that can express the relative position of two intersect planes in space, to achieve the airborne LiDAR point cloud data filtering process. Firstly, the elevation-mutate points are extracted from point cloud data. The iteration ends when the stability of the cosine of non-mutated points′ dihedral angle reaches required level. Then, the frequency distributions of the cosine of both mutated and non-mutated points′ dihedral angle are counted, and draws a line chart. Ground points and non-ground points are classified based on the intersection′s cosine of line chart and slope value of the last iteration. Finally, the open operator of the mathematical morphology is used to remove low vegetation, and the reliable results are obtained. Comparing with ′Progressive TIN Method′, the misjudged percentage of the non-ground points were effectively reduced. Dihedral method can retain topographical information while filtering terrestrial object information.
Key words: airborne LiDAR; dihedral angle filtering; slope; open operator; DEM
LIU Kaisi , WANG Yanbing , GONG Huili , LI Xiaojuan , YU Jie . Dihedral Angle Filtering Algorithm for Airborne LiDAR Point Cloud Data[J]. Journal of Geo-information Science, 2018 , 20(4) : 414 -421 . DOI: 10.12082/dqxxkx.2018.170489
Fig. 1 Dihedral angle图1 二面角 |
Fig. 2 Schematic view of surface elevation change图2 地表高程变化示意图 |
Fig. 3 Flowchart of airborne LiDAR point cloud filtering based on dihedral angel图3 二面角法点云滤波流程图 |
Tab. 1 The cosine of dihedral angle表1 二面角余弦值 |
| 迭代次数/次 | |||||
|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | |
| 斜率阈值 | 3.3 | 2.5 | 2 | 1.6 | 1.3 |
| 二面角余弦均值 | 0.909 | 0.917 | 0.925 | 0.929 | 0.932 |
Fig. 4 Distribution range of dihedral angle cosine for buildings and grounds图4 建筑物和地面的二面角余弦分布范围 |
Fig. 5 Frequency statistics of dihedral angle cosine for elevation mutation and non-mutation points图5 高程突变和非突变点二面角余弦值频率统计 |
Fig. 6 Dihedral angle filtering图6 二面角滤波 |
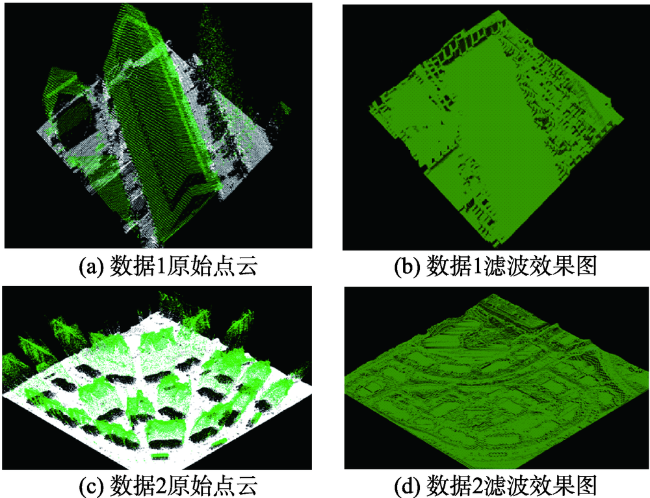
Fig. 7 Filtering results图7 LiDAR点云滤波效果图 |
Tab. 2 Accuracy assessment for filtering algorithm表2 滤波精度评价表 |
| 滤波结果误差统计 | 实验区1 | 实验区2 | |||
|---|---|---|---|---|---|
| 二面角滤波法 | 渐进三角网法 | 二面角滤波法 | 渐进三角网法 | ||
| a | 678 | 3518 | 1583 | 7961 | |
| b | 28 171 | 144 296 | 63 298 | 324 108 | |
| c | 760 | 4824 | 1686 | 10 840 | |
| d | 25 761 | 131 075 | 58916 | 294 547 | |
| Type I Error/% | 2.35 | 2.38 | 2.43 | 2.4 | |
| Type II Error/% | 2.87 | 3.55 | 2.78 | 3.55 | |
| Total Error/% | 2.60 | 2.94 | 2.61 | 2.95 | |
Fig. 8 Distribution of error points图8 误差点分布图 |
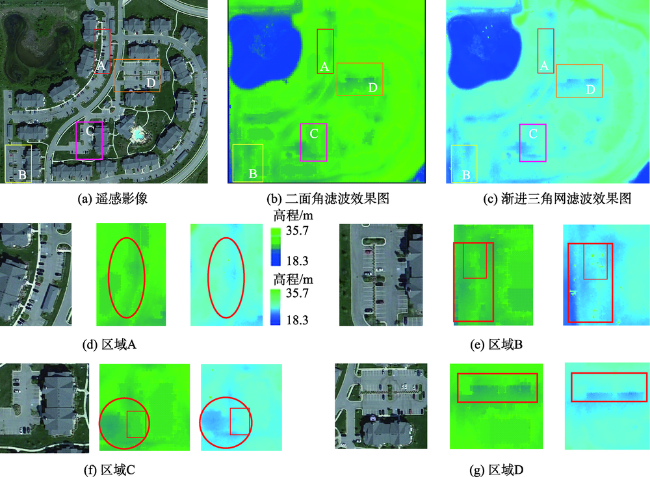
Fig. 9 Comparison of two kinds of filtering methods: Dihedral and TIN filters图9 二面角滤波和渐进三角网滤波方法对比分析 |
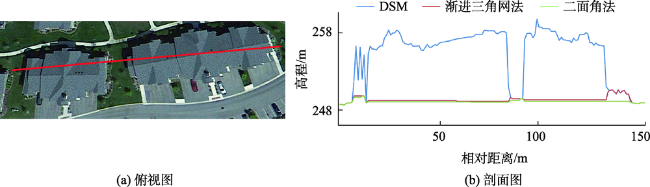
Fig. 10 Top view and sectional view of the area for experiment 2图10 数据2的局部俯视图、剖面图 |
The authors have declared that no competing interests exist.
| [1] |
[
|
| [2] |
|
| [3] |
|
| [4] |
[
|
| [5] |
[
|
| [6] |
[
|
| [7] |
[
|
| [8] |
|
| [9] |
|
| [10] |
[
|
| [11] |
|
| [12] |
[
|
| [13] |
|
| [14] |
[
|
| [15] |
[
|
| [16] |
[
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
[
|
| [22] |
[
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}