
Journal of Geo-information Science >
A Robust Algorithm of Retro-reflective Planar Target Center Positioning
Received date: 2017-10-17
Request revised date: 2018-01-15
Online published: 2018-04-20
Supported by
The Foundation of High-Precision Measuring Joint Laboratory for Spacecraft, No.201501.
Copyright
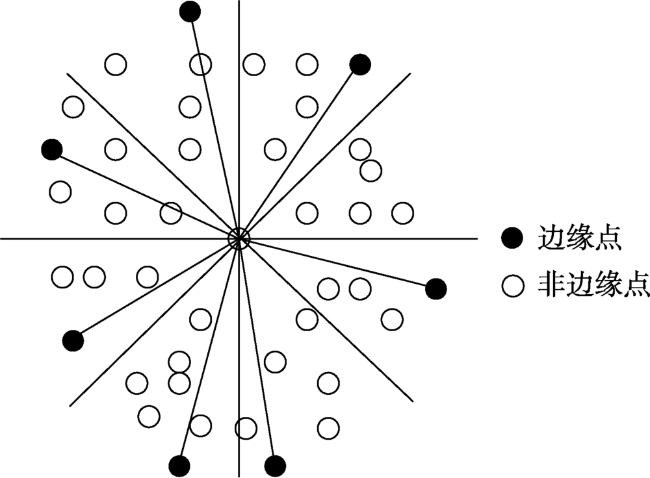
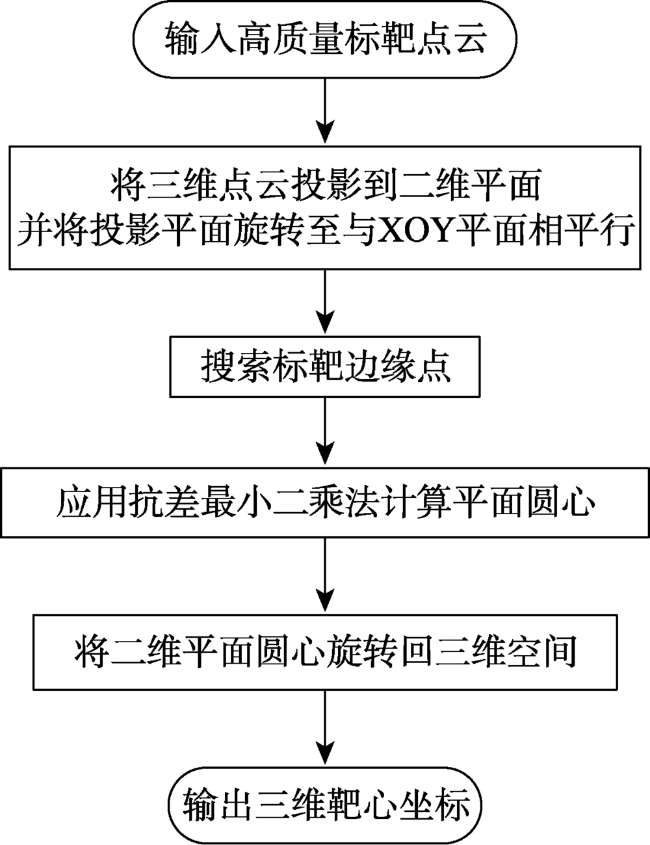
To solve the problem of calculating the center of retro-reflective planar target when the point clouds are deficient or redundant, an algorithm of extracting edge points and calculating target center is proposed. The algorithm includes three steps: (1) point clouds preprocessing; (2) edge points extracting; (3) target center calculating. In step (1), the rough region of the target points is artificially segregated from the points scanned by the laser scanner first. Then, the target points are accurately extracted from the rough region according to the intensity of return light. The noise points are removed from the target points to get the high-quality target point clouds. Finally, the high-quality target point clouds are projected into a plane, called the best fitting plane, and then the plane is rotated to be parallel with the XOY coordinate plane. In step (2), the barycenter of the target point clouds is calculated, and then all the points are translated to a new coordinate plane with the barycenter as its origin. The new coordinate plane is divided into several fan-shaped regions. The point is regarded as the edge one only when it is farthest away from the origin in one region. In step (3), the equation of the target circle is calculated by fitting the edge points, using the robust least square method. The fitting circle center is rotated back to 3D space used for target point cloud. The resulted circle center in 3D space is regarded as the estimated value of the planar target center. In order to test the effectiveness of the proposed algorithm, three tests were conducted. Firstly, the target center of high-quality target point clouds was separately calculated by the proposed algorithm and centroid method, and the accuracy of target center locations was compared. Secondly, the edge points were extracted by the proposed algorithm and the method in Ref. [12], and the time efficiency of the algorithms was compared. Thirdly, the center of low-quality target point clouds is calculated by the proposed algorithm, and methods introduced in Ref. [11] and Ref. [12], and the bias and location accuracy from these methods were compared. The experimental results show that the proposed algorithm of extracting the edge points can get good results in shorter computing time than that by Ref. [12] method. And the proposed algorithm can quickly and accurately calculate the target center, and the location accuracy is better than 1mm, better than that of Ref. [11] and Ref. [12] method. The proposed method is effective and practical.
FU Yongjian , LI Zongchun , HE Hua . A Robust Algorithm of Retro-reflective Planar Target Center Positioning[J]. Journal of Geo-information Science, 2018 , 20(4) : 422 -429 . DOI: 10.12082/dqxxkx.2018.170486
Fig. 1 The schematic diagram of edge points extracting图1 边缘点提取原理图 |
Fig. 2 The flow chart of target center positioning图2 靶心定位算法流程图 |
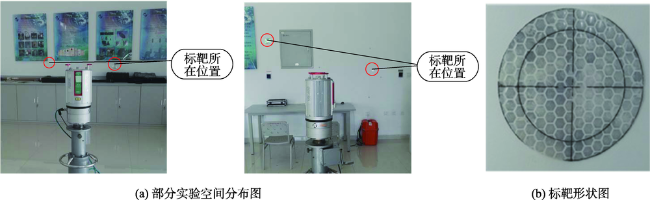
Fig. 3 The experiment settings and the shape of target图3 部分实验空间分布图及标靶形状图 |
Tab. 1 The target center coordinates by the proposed algorithm and centroid method and their differences表1 本文算法和重心法靶心坐标计算值及二者差值(mm) |
| 标靶 编号 | 重心法 | 本文算法 | 二者差值 | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| X | Y | Z | X | Y | Z | |||||||
| 001 | -4244.6 | 3085.7 | 1168.4 | -4244.7 | 3085.5 | 1168.4 | 0.1 | 0.2 | 0.0 | 0.2 | ||
| 002 | 4494.3 | 3158.2 | 43.5 | 4494.0 | 3158.3 | 43.3 | 0.3 | -0.1 | 0.2 | 0.4 | ||
| 003 | -1946.4 | -2553.4 | 446.0 | -1946.4 | -2553.4 | 446.1 | 0.0 | 0.0 | -0.1 | 0.1 | ||
| 004 | 1739.8 | 2065.4 | -43.5 | 1739.8 | 2065.4 | -43.5 | 0.0 | 0.0 | 0.0 | 0.0 | ||
| 005 | -6837.4 | 3749.9 | -1167.3 | -6837.2 | 3749.5 | -1167.9 | -0.2 | 0.4 | 0.6 | 0.7 | ||
| 006 | -7441.6 | 4170.1 | -155.3 | -7441.3 | 4170.0 | -155.9 | -0.3 | 0.1 | 0.6 | 0.7 | ||
| 007 | -5278.4 | -1372.8 | 101.0 | -5278.4 | -1372.9 | 100.8 | 0.0 | 0.1 | 0.2 | 0.2 | ||
| 008 | 424.7 | 4048.6 | 215.7 | 425.0 | 4048.4 | 215.4 | -0.3 | 0.2 | 0.3 | 0.5 | ||
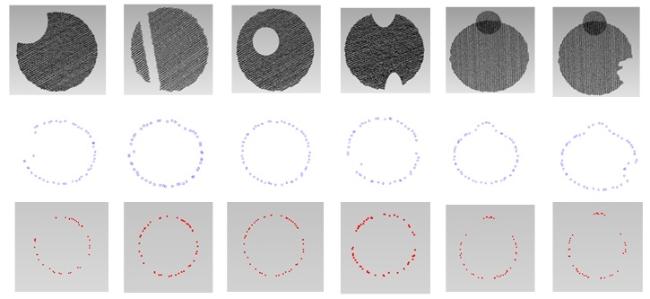
Fig. 4 Different kinds of low-quality point clouds and their edge points图4 不同类型低质量点云及其边缘点 |
Tab. 2 The target center location bias of the proposed algorithm and Ref. [12] algorithm表2 本文算法和文献[12]算法靶心定位偏差(mm) |
| 标靶编号 | 本文算法靶心定位偏差 | 文献[12]算法靶心定位偏差 | |||||||
|---|---|---|---|---|---|---|---|---|---|
| 004_1 | 0.1 | -0.1 | -0.4 | 0.4 | -1.9 | -0.2 | 0.2 | 1.9 | |
| 004_2 | 0.0 | 0.0 | -0.2 | 0.2 | 0.4 | -0.6 | 0.5 | 0.9 | |
| 004_3 | 0.0 | 0.0 | -0.1 | 0.1 | -0.8 | -0.5 | -0.1 | 0.9 | |
| 004_4 | 0.0 | 0.0 | -0.2 | 0.2 | -0.6 | -0.5 | -0.2 | 0.8 | |
| 004_5 | 0.1 | 0.0 | -0.1 | 0.1 | -2.9 | -6.6 | 2.3 | 7.5 | |
| 004_6 | 0.1 | -0.1 | -0.2 | 0.2 | -6.3 | -7.7 | 2.5 | 10.1 | |
Tab. 3 The location precision comparison of the proposed algorithm and Ref. [11] algorithm表3 本文算法和文献[11]算法定位精度对比(mm) |
| 标靶编号 | 本文算法 | 文献[11]算法 | |||||||
|---|---|---|---|---|---|---|---|---|---|
| 004_1 | 0.1 | -0.1 | -0.4 | 0.4 | -1.9 | -1.4 | -0.7 | 2.5 | |
| 004_2 | 0.0 | 0.0 | -0.2 | 0.2 | 0.7 | 0.5 | 2.0 | 2.2 | |
| 004_3 | 0.0 | 0.0 | -0.1 | 0.1 | -0.8 | 0.6 | -0.4 | 1.1 | |
| 004_4 | 0.0 | 0.0 | -0.2 | 0.2 | 0.2 | -0.2 | 0.4 | 0.5 | |
| 004_5 | 0.1 | 0.0 | -0.1 | 0.1 | 0.0 | 0.0 | -2.2 | 2.2 | |
| 004_6 | 0.1 | -0.1 | -0.2 | 0.2 | -0.8 | 0.6 | 2.7 | 2.9 | |
Tab. 4 The efficiency comparison of the proposed algorithm and Ref. [12] algorithm表4 本文算法和文献[12]算法效率对比 |
| 标靶编号 | ||||||||
|---|---|---|---|---|---|---|---|---|
| 001 | 002 | 003 | 004 | 005 | 006 | 007 | 008 | |
| 点数/个 | 29 987 | 23 387 | 20 120 | 60 609 | 21 306 | 20 045 | 30 142 | 30 846 |
| 本文算法耗时/s | 3.8 | 1.1 | 1.8 | 2.2 | 0.8 | 0.8 | 1.1 | 1.1 |
| 文献[12]算法耗时/s | 165.5 | 119.9 | 95.5 | 228.5 | 119.9 | 99.7 | 202.2 | 200.9 |
The authors have declared that no competing interests exist.
| [1] |
[
|
| [2] |
[
|
| [3] |
[
|
| [4] |
[
|
| [5] |
[
|
| [6] |
|
| [7] |
[
|
| [8] |
[
|
| [9] |
[
|
| [10] |
[
|
| [11] |
[
|
| [12] |
[
|
| [13] |
[
|
| [14] |
[
|
| [15] |
[
|
| [16] |
[
|
| [17] |
[
|
| [18] |
[
|
| [19] |
[
|
| [20] |
[
|
| [21] |
[
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}