
Journal of Geo-information Science >
A Fast Method of Building Extraction from Mobile LiDAR Scanning Data
Received date: 2017-10-09
Request revised date: 2017-12-23
Online published: 2018-04-20
Supported by
National Natural Science Foundation of China, No.41501482
State Key Laboratory of Geo-information Engineering, No.SKLGIE 2015-M-3-6
Beijing Key Laboratory of Urban Spatial Information Engineering, No.2017203.
Copyright
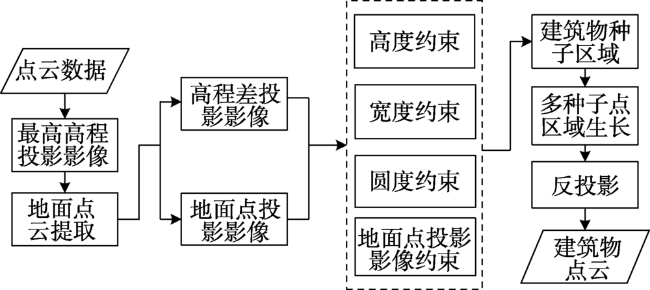
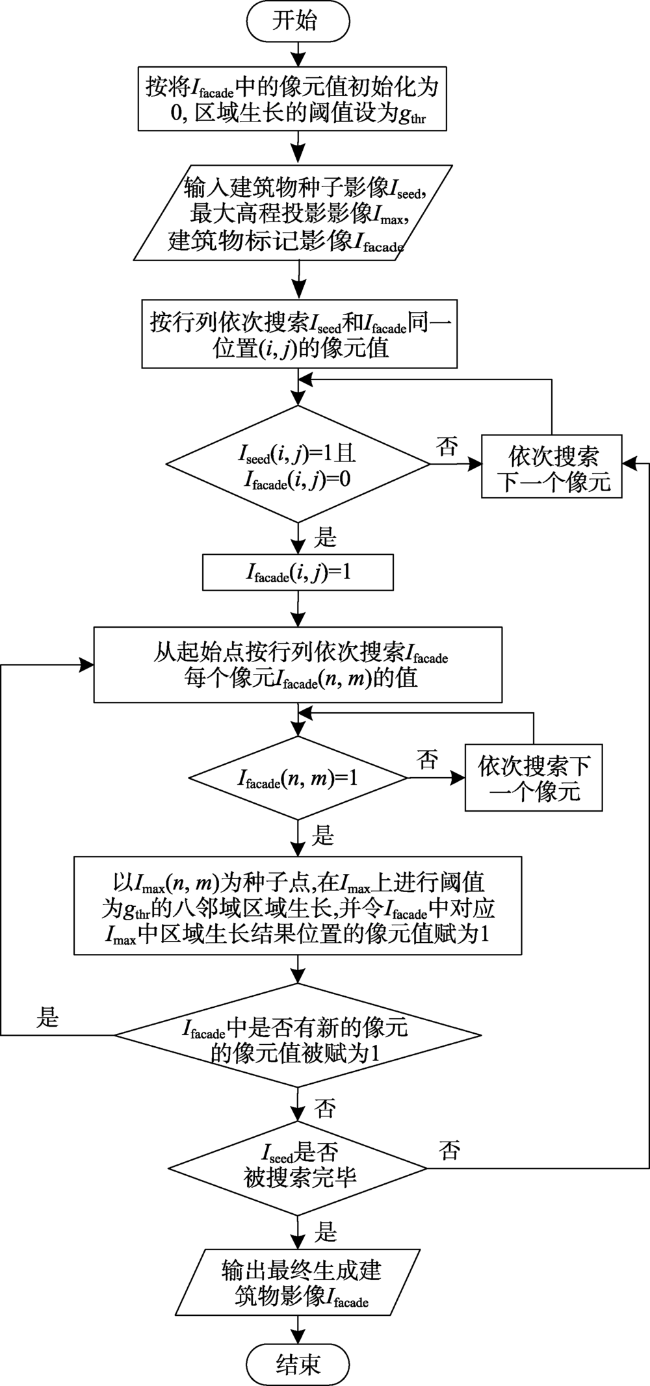
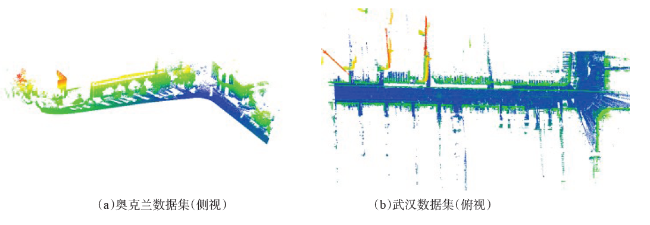
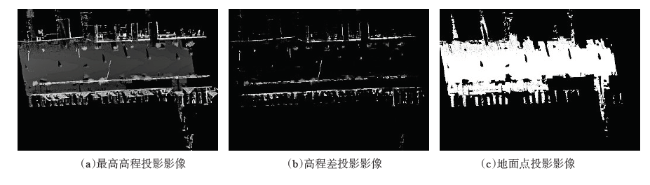
The mobile LiDAR scanning system is a useful tool for getting the top information as well as façade information of buildings, which makes it as primary means to obtain 3D city modeling infrastructure. The first step of 3D modeling is to extract the building data from the complex mobile point cloud data quickly and accurately. Therefore, it is of great significance to study a fast and effective method of building extraction from vehicle laser scanning data. The buildings in mobile laser scanning data has the characteristics of uneven distribution of point densities, lack of existence, and some of the buildings in the measured data are not strictly flat, the top data of the low building is not the façade. In order to solve the problems discussed above, a method of building extraction in complex urban scenes from mobile LiDAR is proposed by using a variety of projection images. Firstly, the method projects the point cloud data into the XOY plane to produce a variety of projected images. Secondly, based on the geometric semantic features of the buildings, the geometric constraints and morphological calculations of the acquired projection images are processed to get the seed area of the building. On the basis of this seed area, the eight-neighborhood region of the building seed area is grown on the highest elevation image by setting the height difference threshold to obtain the building area. Lastly, the building area on the image is back-projected into three-dimensional space to extract the building objectives. Two data sets with different point densities and different scanning tools are used to verify the effectiveness of this method. Results show that this method has higher data processing efficiency than the existing three-dimensional extraction method because point cloud data is projected into the two-dimensional image and the geometrical features of the building are synthetically used in the process of building extraction. Using this method, both top surface and non-façade buildings can be extracted precisely. In this paper, sub-regional growth methods solve the problem that it′s difficult to extract the buildings with incompleteness of cloud data which is caused by the blockage through the traditional projection method.
SHAO Lei , DONG Guangjun , YU Ying , YAO Qiangqiang , ZHANG Along . A Fast Method of Building Extraction from Mobile LiDAR Scanning Data[J]. Journal of Geo-information Science, 2018 , 20(4) : 462 -470 . DOI: 10.12082/dqxxkx.2018.170470
Fig. 1 Framework of building extraction图1 建筑物提取流程 |
Fig. 2 Framework of multiple seed region growth图2 多种子点区域生长流程图 |
Fig. 3 Two sets of test data图3 实验数据 |
Fig. 4 Multiple projection images图4 投影影像 |
Tab. 1 The parameters settings of building seed area extraction表1 建筑物种子区域提取实验参数设置 |
| 参数 | 奥克兰数据集 | 武汉数据集 |
|---|---|---|
| 高度/m | 3 | 3 |
| 宽度/m | 3 | 3 |
| 圆度 | 1/3 | 1/3 |
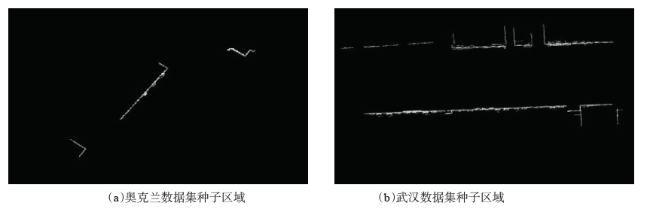
Fig. 5 Results of building seed area extraction图5 建筑物种子区域提取结果 |
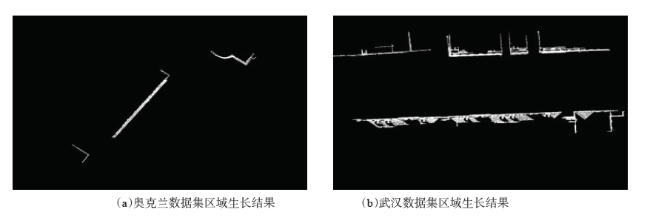
Fig. 6 Results of multiple seed region growth图6 区域生长结果 |
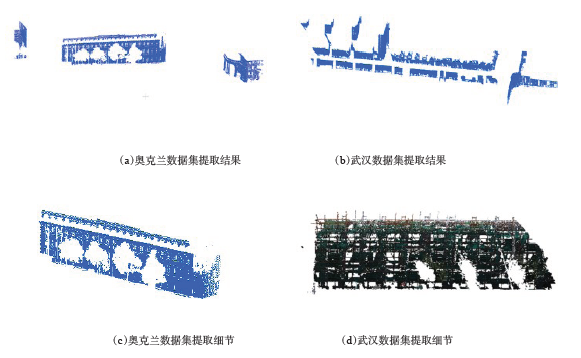
Fig. 7 Results of final building extraction图7 建筑物提取结果 |
Tab. 2 Comparison analysis of processing efficiencyof the proposed approach表2 处理效率对比分析 |
| 提取方法 | 正确率/% | 完整率/% | 计算耗时/s |
|---|---|---|---|
| 自适应邻域方法 | 0.93 | 0.89 | 883 |
| 文献[12]方法 | 0.87 | 0.83 | 727 |
| 本文方法 | 0.97 | 0.95 | 102 |
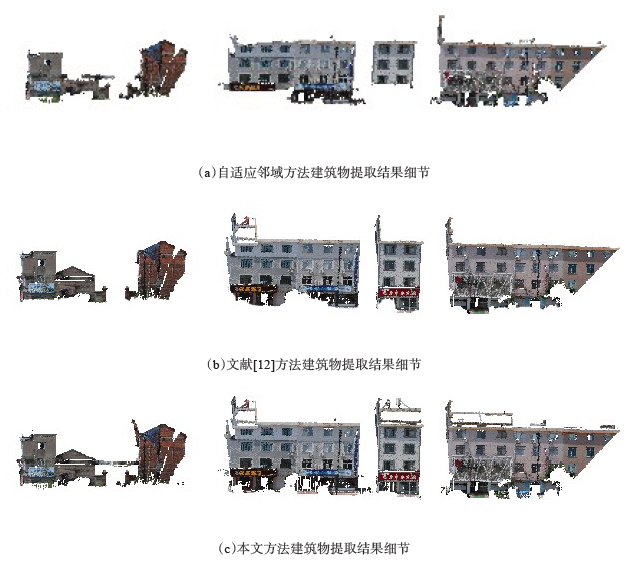
Fig. 8 Building extraction results of two methods图8 2种方法建筑物提取结果 |
The authors have declared that no competing interests exist.
| [1] |
[
|
| [2] |
[
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
[
|
| [7] |
[
|
| [8] |
|
| [9] |
[
|
| [10] |
[
|
| [11] |
[
|
| [12] |
[
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}