
Journal of Geo-information Science >
A New ROAM Algorithm and Its Application in Terrain Modeling
Received date: 2018-01-15
Request revised date: 2018-06-22
Online published: 2018-09-25
Supported by
The National Natural Science Fund, No.41571374
National Key Research and Development Plan, No.2017YFB0503802
The Key Project of the Hunan Provincial Department of Education, No.16A070
Hunan and Xiangtan Joint Natural Science Fund, No.2017JJ4037
The Open Fund of the Key Laboratory of Hunan province for Special Environmental Road Engineering, No.kfj150502.
Copyright
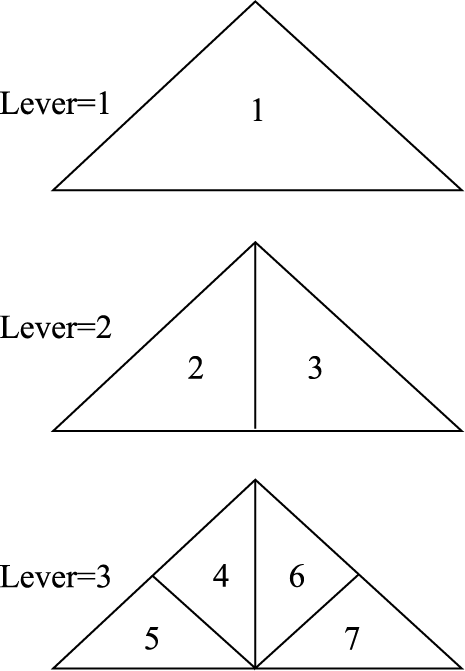
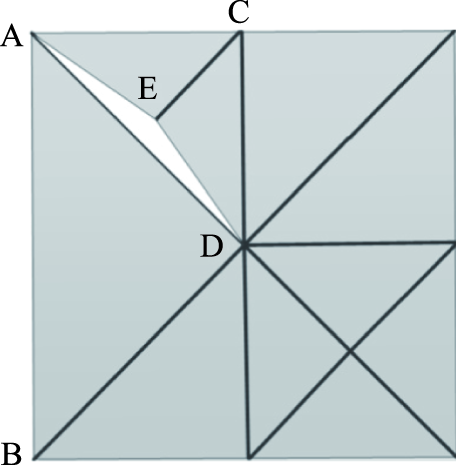
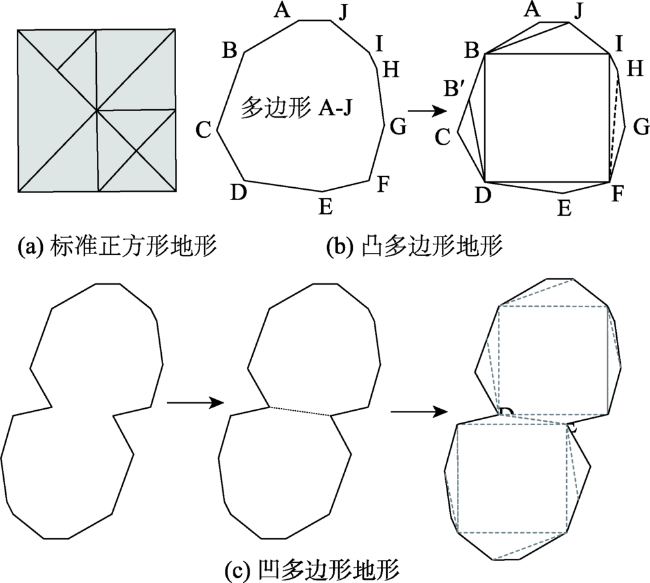
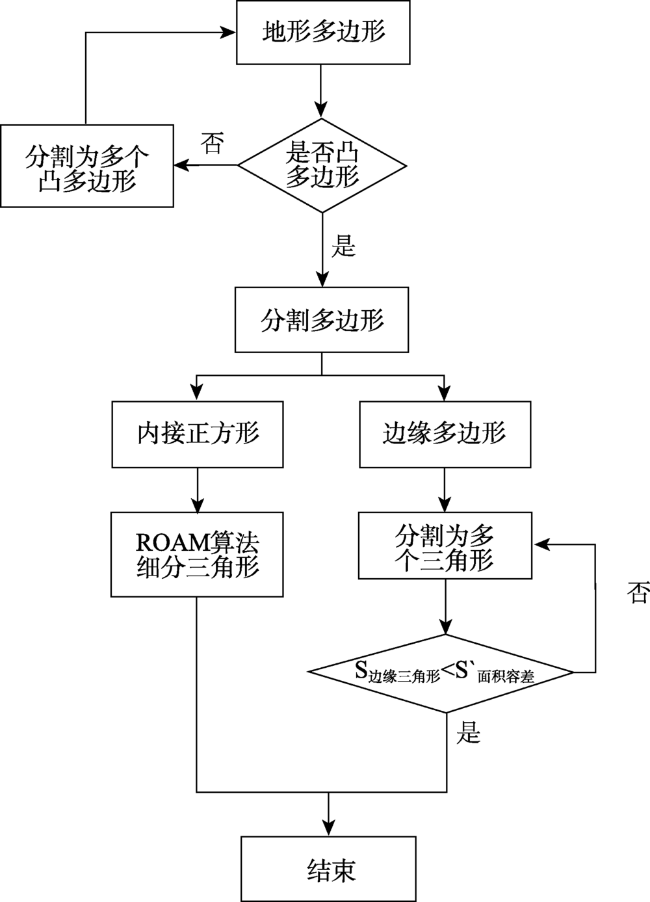
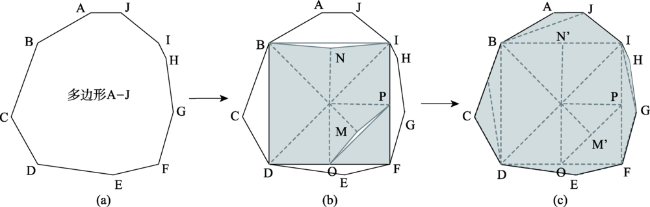
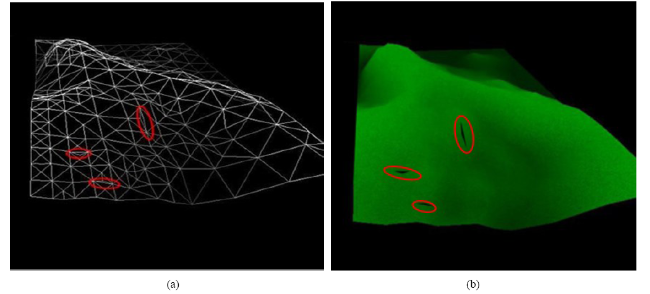
Terrain modeling is important in the digital terrain analysis. Real-time adaptive mesh algorithm (ROAM algorithm) is a commonly used terrain modeling method. However, applying ROAM algorithm to real-time rendering of terrain visualization requires the original data to be square and cracks often occur after rendering, so this method is greatly restricted in the practice of terrain modeling. Aiming at the above disadvantages of the ROAM algorithm, an improved ROAM algorithm based on the interpolation of inner square is proposed in this paper. The polygon is divided into an inner square and multiple edge polygons, then the vertexes of these polygons are connected sequentially to divide the polygons into multiple triangles, and according to the size of the edge triangles, whether to continue segmentation of the edge polygon is determined. Thus, the problem of limiting the data source to a square is solved, and the crack generated by the terrain rendering is eliminated by adding split points. Using the irregular terrain gray image as the elevation data for terrain simulation experiment, the results show that the improved levenshtein distance algorithm can eliminate the crack with no binding requirements for data source, reduce the algorithm complexity and improve the overall visual performance. It can meet the requirements of terrain real-time dynamic display.
LI Chaokui , WANG Ning , WU Baiyan , FANG Jun , YANG Wentao , CHU Nan . A New ROAM Algorithm and Its Application in Terrain Modeling[J]. Journal of Geo-information Science, 2018 , 20(9) : 1209 -1215 . DOI: 10.12082/dqxxkx.2018.180050
Fig.1 ROAM mesh division principle图1 ROAM网格剖分原理 |
Fig. 2 Generation of cracks in adjacent areas图2 邻区裂缝的产生 |
Fig. 3 Different terrain segmentation图3 不同地形分割 |
Fig. 4 Flowchart of terrain segmentation algorithm图4 地形分割算法流程 |
Fig. 5 Repair of terrain cracks图5 地形裂缝修补图 |
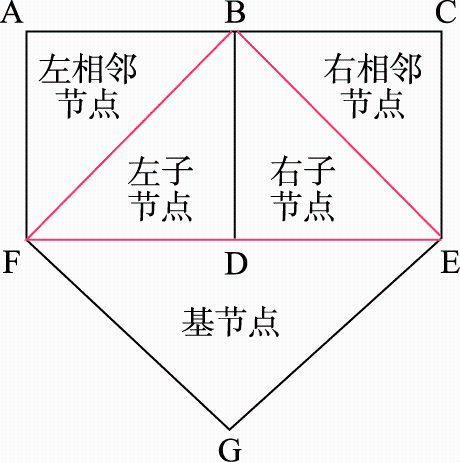
Fig. 6 Relationship between triangles图6 三角形间的关系 |
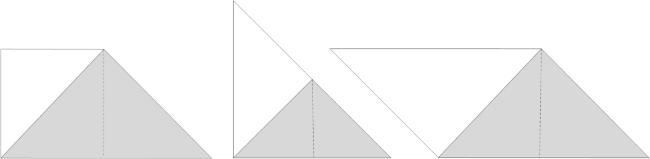
Fig. 7 Left-neighbor nodes in three different situations图7 三种不同情况的左相邻节点 |
Fig.8 Three different cases of the right adjacent nodes图8 3种不同情况的右相邻节点 |
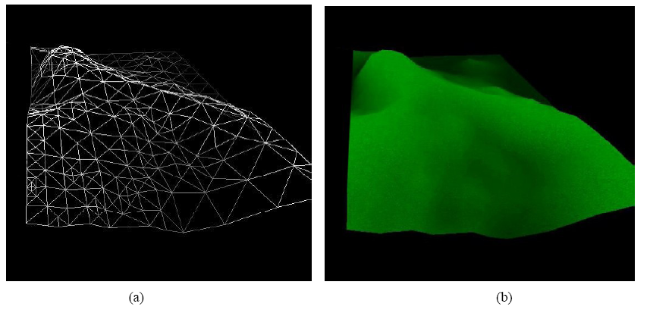
Fig. 9 Standard square data terrain grid without crack elimination图9 未经过裂缝消除的标准正方形数据地形网格 |
Fig.10 Standard square data terrain grid through crack elimination图10 经过裂缝消除的标准正方形数据地形网格 |
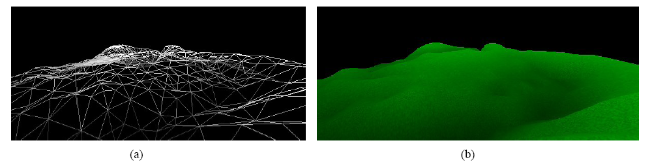
Fig.11 Model of forced segmentation图11 强制分割建模模型 |
Fig.12 Adding split point modeling model图12 添加拆分点建模模型 |
Tab. 1 Algorithm efficiency comparison表1 算法效率对比 |
| 裂缝修补 | 三角形数量 | 建模时间/ms |
|---|---|---|
| 强制分割法 | 19 712 | 4335.40 |
| 添加拆分点法 | 11 840 | 2309.66 |
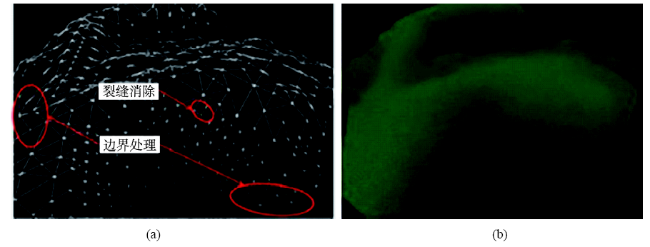
Fig.13 Results of improved ROAM algorithm图13 改进的ROAM算法实验结果 |
The authors have declared that no competing interests exist.
| [1] |
[
|
| [2] |
[
|
| [3] |
[
|
| [4] |
[
|
| [5] |
|
| [6] |
[
|
| [7] |
|
| [8] |
[
|
| [9] |
[
|
| [10] |
[
|
| [11] |
[
|
| [12] |
[
|
| [13] |
[
|
| [14] |
|
| [15] |
[
|
| [16] |
[
|
| [17] |
|
| [18] |
[
|
/
| 〈 |
|
〉 |


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}