
Journal of Geo-information Science >
Identifying Soybean Cropped Area with Sentinel-2 Data and Multi-Layer Neural Network
Received date: 2018-08-30
Request revised date: 2018-12-27
Online published: 2019-06-15
Supported by
Science and Technology Service Network Initiative, No.KFJ-STS-ZDTP-009
the National Natural Science Foundation of China, No.41561144013, 41861144019, 41701496
Copyright
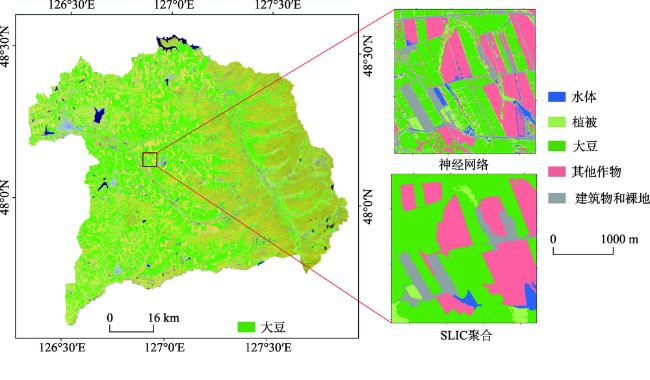
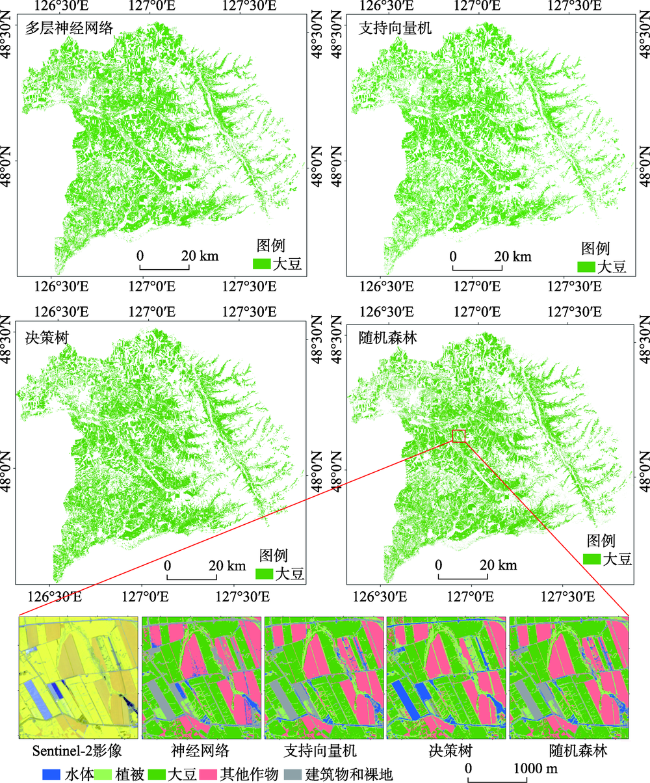
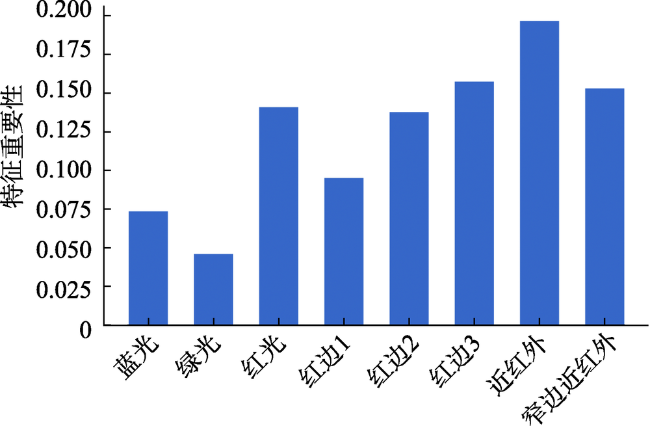
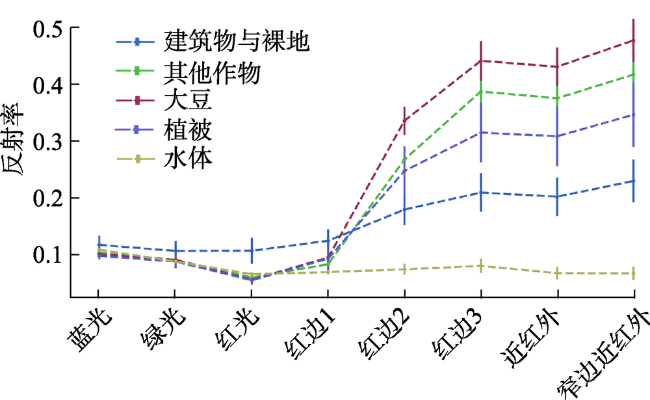
As the most important oil crop in the world, soybean is a large-scale agricultural product that China imports. The accurate identification of its planting area is the basis for decision-making and planting structure adjustment, and is of great significance to national food security. Sentinel-2 was used as a data source and multi-layer neural network was employed to map soybean cropped area. Besides, visible and infrared bands, three red-edge bands were also selected after radiation and atmospheric correction using the Sentinel-2 Toolbox. According to our test, 8-hidden-layer conducted using Scikit-learn package in Python2.7 was the optimal structure for identifying soybean and other crops. Simple linear iterative clustering (SLIC), the state-of-art segmentation algorithm, was performed to segment the remote sensed image. This method combined five-dimensional color and the image plane space to efficiently generate compact and nearly uniform super pixels. To remove the “salt and pepper effect”, the pixel-based result was integrated with the object output from the SLIC. If the pixel as soybean in an object accounted for less than 50%, this object was eliminated in the fusion map. The results showed that the overall accuracy of multi-layer neural network was 93.95%, which was highest and followed by the support vector machine, decision tree, and random forest. Then, the neural network classification was selected as the best result to integrate with SLIC object-oriented segmentation, and the results ignored the small differences of the same land and distinguish the crop differences of different blocks compared with the segmentation in eCognition software. Sentinel-2 data is an appropriate data source for large-scale soybean planting mapping. According to feature importance derived from the random forest classifier, near-infrared band is the most critical feature for classification, followed by third red edge band (Band 7), fourth red edge 4 band (Band 8), red band, and second red edge band (Band 6). The reflectance values of soybeans and other crops in the second red edge band were different, indicating a huge potential in crop type identifying. In the future, the red edge band can be introduced more into crop type even landscape classification. The multi-layer neural network method performs well in the image classification task and had similar or better overall accuracy value compared with other outstanding machine learning classifier including SVM, decision tree, and random forest. Combined with the image segmentation algorithm, such as SLIC, multi-layer neural network can map soybean cropped area with an accuracy high up to 95.51%, which can serve for soybean planting area monitoring in a large area.
TIAN Fuyou , WU Bingfang , ZENG Hongwei , HE Zhaoxin , ZHANG Miao , José Bofana . Identifying Soybean Cropped Area with Sentinel-2 Data and Multi-Layer Neural Network[J]. Journal of Geo-information Science, 2019 , 21(6) : 918 -927 . DOI: 10.12082/dqxxkx.2019.180424
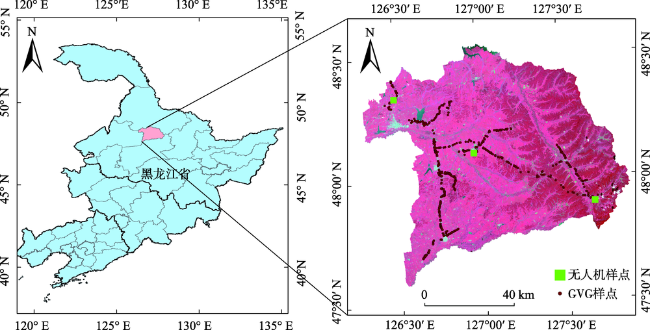
Fig. 1 The location of study area and sampling point图1 研究区位置与样点分布 |
Tab. 1 The detailed information of Sentinel-2 sensor表1 Sentinel-2传感器信息 |
| 波段 | Sentinel-2A | Sentinel-2B | ||||
|---|---|---|---|---|---|---|
| 中心波长/nm | 波宽/nm | 中心波长/nm | 波宽/nm | 分辨率/m | ||
| B2-蓝光 | 496.6 | 98 | 492.1 | 98 | 10 | |
| B3-绿光 | 560.0 | 45 | 559 | 46 | 10 | |
| B4-红光 | 664.5 | 38 | 665 | 39 | 10 | |
| B5-红边1 | 703.9 | 19 | 703.8 | 20 | 20 | |
| B6-红边2 | 740.2 | 18 | 739.1 | 18 | 20 | |
| B7-红边3 | 782.5 | 28 | 779.7 | 28 | 20 | |
| B8-近红外 | 835.1 | 145 | 833 | 133 | 10 | |
| B8A-窄边近红外 | 864.8 | 33 | 864 | 32 | 20 | |
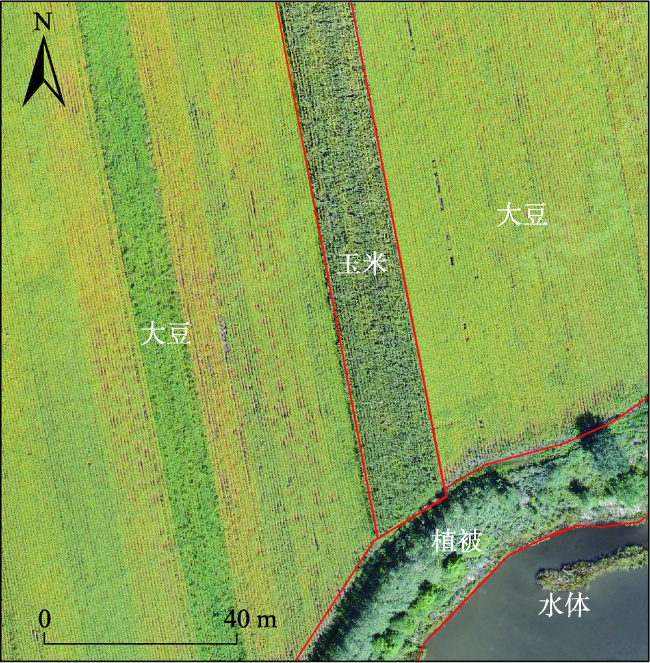
Fig. 2 Samples extracted from unmanned aerial vehicle图2 无人机训练样本提取 |
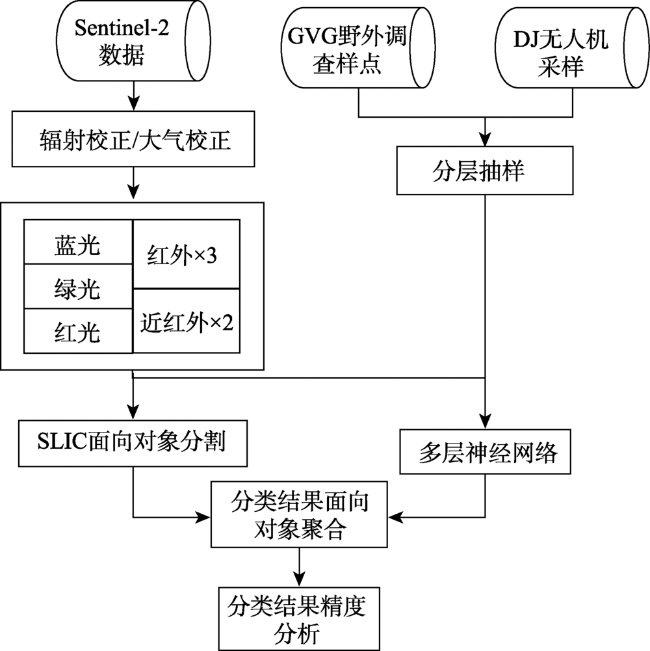
Fig. 3 Technical flowchart of this research图3 北安市大豆分类技术路线 |
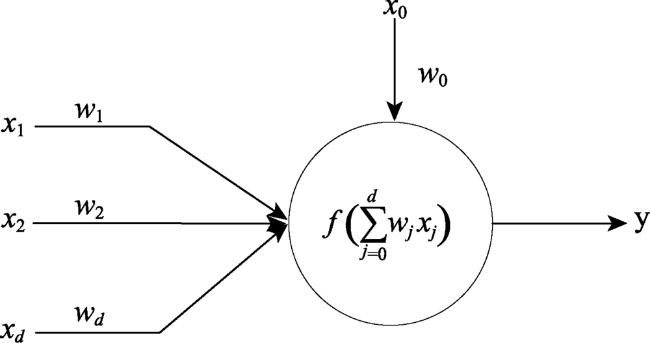
Fig. 4 The neuron model图4 神经元模型 |
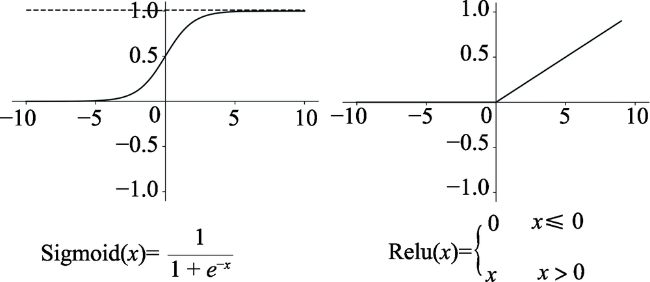
Fig. 5 Equations and graphs of sigmoid and ReLU activation function图5 Sigmoid与ReLU激励函数 |
Tab. 2 Detailed parameters used in Multi-layer neural network and SLIC segmentation表2 神经网络和SLIC分割方法具体参数 |
| 方法 | 具体参数 |
|---|---|
| 神经网络 | alpha=1e-5, hidden_layer_sizes=(20,20,20,20,20,20,20,20), max_iter=100 000, early_stopping=True |
| SLIC分割 | compactness=10, sigma=0 |
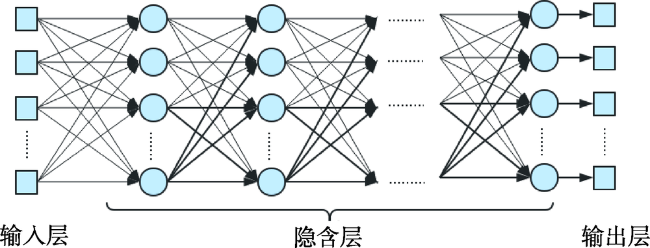
Fig. 6 Structure of multi-layer neural network图6 多层神经网络结构 |
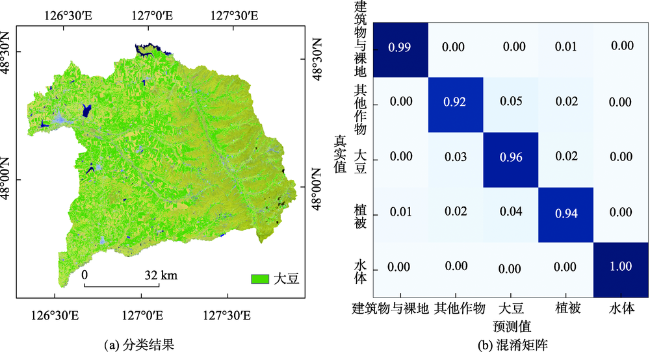
Fig. 7 Results and confusion matrix of the neural network model图7 神经网络方法分类结果及混淆矩阵 |
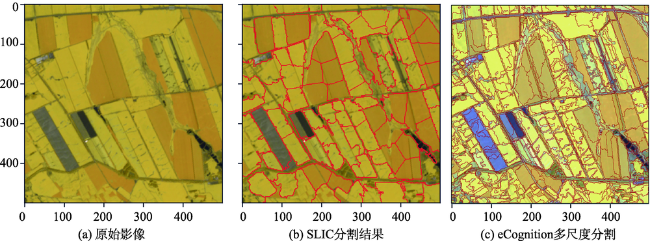
Fig. 8 Comparison between SLIC segmentation and muti-scale segmentation in eCognition图8 SLIC分割与eCognition 多尺度分割结果对比 |
Fig. 9 Distribution of soybean in beian county obtained from aggregating mutil-layer neural network results according to the SLIC segmentation图9 北安市神经网络分类与SLIC聚合后的大豆分类结果 |
Fig. 10 Comparison between multi-layer neural network and typical machine learning method including support vector machine, decision tree, and random forest图10 多层神经网络与典型机器学习方法分类结果对比 |
Tab. 3 Comparison of four methods' accuracy (%)表3 不同机器学习方法精度比较。。 |
| 分类方法 | 其他作物 | 大豆 | 总体精度 | |||||
|---|---|---|---|---|---|---|---|---|
| 用户精度 | 生产者精度 | F1-Score | 用户精度 | 生产者精度 | F1-Score | |||
| 随机森林 | 96.24 | 89.73 | 92.87 | 91.86 | 95.01 | 93.41 | 92.37 | |
| 支持向量机 | 94.37 | 92.66 | 93.51 | 92.15 | 94.36 | 93.24 | 93.51 | |
| 决策树 | 94.67 | 90.68 | 92.63 | 91.38 | 94.41 | 92.87 | 92.55 | |
| 神经网络 | 95.56 | 92.39 | 93.95 | 91.63 | 95.51 | 93.53 | 93.95 | |
Fig. 11 Importance of features in the sentienl-2 data图11 Sentinel-2各波段在分类中的特征重要性 |
Fig. 12 Distribution of bands for various classes图12 各类别波段分布情况 |
The authors have declared that no competing interests exist.
| [1] |
国家统计局.中华人民共和国2017年国民经济和社会发展统计公报[P]. 2018..
[ National statisticureau. Statistical bulletin on national economic and social development in 2017 of People's Republic of China[P]. 2018, ]
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
[
|
| [6] |
[
|
| [7] |
|
| [8] |
[
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
[
|
| [16] |
|
| [17] |
|
| [18] |
[
|
| [19] |
|
| [20] |
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}