
Journal of Geo-information Science >
Current Status and Application Prospect Analysis of VTOL-UAVs for Remote Sensing Applications in China
Received date: 2018-09-01
Request revised date: 2019-03-07
Online published: 2019-04-24
Supported by
The National Key R&D program of China Grant No.2017YFB0503002
Copyright
In recent years, demand of unmanned aerial remote sensing tools is growing for ecological environment, flood disaster emergency response, land security monitoring and other remote sensing observation tasks. Building heterogeneous UAV remote sensing observation multi-task cluster system is the development goal in recent years. In order to complete the ecological construction of UAV remote sensing, vertical take-off and landing UAV plays an increasingly important role in many fields because of its characteristics of fast patrol and taking-off and landing without site restrictions. The main contents of this paper include the research on the development status of domestic vertical take-off and landing UAV, the analysis of UAVs for the aviation remote sensing application market and the introduction of typical UAV models, the application scenarios and case analysis of the vertical take-off and landing UAV in the field of remote sensing, and the application prospects and development trends of the vertical take-off and landing UAV in the field of remote sensing. Through extensive research and in-depth analysis, it is known that the vertical take-off and landing UAVs with fixed-wing are gradually replacing the dominant position of multi-rotor aircraft; vertical take-off and landing UAVs occupy 80.47% of the market share of remote sensing application drones; Diversified power, intelligent system, diversified layout, and small size are the development direction of vertical take-off and landing UAVs for remote sensing applications. This paper comprehensively expounded and analyzed the related content of vertical take-off and landing UAVs for remote sensing applications, and provides reference and support for the ecological construction of remote sensing aviation drones.
YANG Menglin , LI Daochun , WAN Zhiqiang , YAN De , WANG Yaokun . Current Status and Application Prospect Analysis of VTOL-UAVs for Remote Sensing Applications in China[J]. Journal of Geo-information Science, 2019 , 21(4) : 496 -503 . DOI: 10.12082/dqxxkx.2019.180422
Tab. 1 Comparison of advantages and disadvantages of three kinds of vertical takeoff and landing UAVs表1 3种垂直起降无人机优缺点对比 |
| 类型 | 优点 | 缺点 |
|---|---|---|
| 无人直升机 | 载重大、续航时间久 | 飞行速度低、系统复杂 |
| 多旋翼无人机 | 操作简便、容易入门 | 载重小、续航时间短 |
| 垂直起降固定翼无人机 | 载重较大、速度快 | 控制系统难度大 |
Fig. 1 AV-500 unmanned helicopter developed by AVIC图1 中航工业研发的AV-500无人直升机①(① 图片来自https://baike.baidu.com/item/AV500%E6%97%A0%E4%BA%BA%E7%9B%B4%E5%8D%87%E6%9C%BA/16171952?fr=aladdin。) |
Fig. 2 Unmanned helicopters exhibited at the 9th China UAV Conference & Exhibition图2 第九届中国无人机大会暨展览会上展出的无人直升机②(② 图片来自http://baijiahao.baidu.com/s?id=1603148763884089549&wfr=spider&for=pc。) |
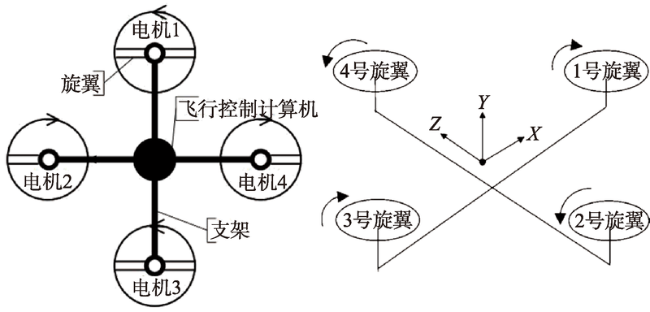
Fig. 3 Schematic diagram of the four-rotor flight principle图3 四旋翼飞行原理示意③(③ 图片来自https://www.cnblogs.com/northking/p/4234525.html(左图); https://www.wendangwang.com/doc/55010377ca47a2786397d830(右图)。) |
Fig. 4 Vesper tilio multi-rotor图4 “天蝠”多旋翼④(④ 图片来自http://www.tx-tech.cn/vespertilio#page3。) |
Fig. 5 "Little Dolphin" UAV byBeihang University图5 北京航空航天大学“小海豚”无人机 |
Fig. 6 Transporting suppliesby UAV图6 无人机运送物资⑤(⑤ 图片来自http://news.163.com/16/0330/11/BJDC36HC000146BE_mobile.html。) |
Fig. 7 CW-20 UAV图7 CW-20无人机⑥(⑥ 图片来自http://www.sohu.com/a/237372194_99973364。) |
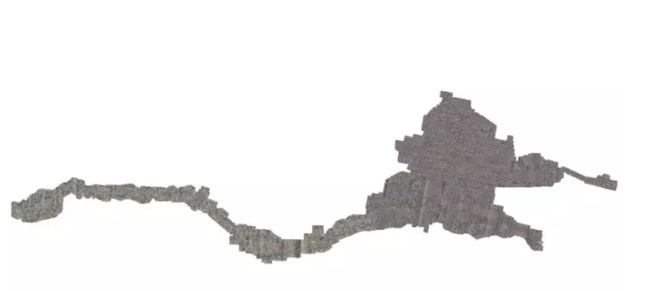
Fig. 8 Taklimakan Desert Oasis 1:2000 orthophoto results图8 塔克拉玛干沙漠绿洲1:2000正射影像结果⑥ |
Fig. 9 "Little Cyclone" plant protectionUAV图9 “小旋风”植保无人机⑦(⑦ 图片来自http://www.sunhawk.cc/product_detail/pmcId=30.html。) |
Tab. 2 Statistical results of Market Research on UAV models and their market share表2 无人机机型及其市场占比调研统计结果 |
| 无人机机型 | 数量/种 | 所占百分比/% | ||
|---|---|---|---|---|
| 可以垂直起降的无人机 | 传统直升机机型 | 88 | 11.53 | 80.47 |
| 多旋翼无人机 | 464 | 60.81 | ||
| 垂直起降固定翼无人机 | 52 | 6.82 | ||
| 其他 | 10 | 1.31 | ||
| 其他方式起降的无人机 | 149 | 19.53 | ||
| 总计 | 763 | 100.00 | ||
The authors have declared that no competing interests exist.
| [1] |
[
|
| [2] |
[
|
| [3] |
[
|
| [4] |
[
|
| [5] |
[
|
| [6] |
[
|
| [7] |
[
|
| [8] |
[
|
| [9] |
[
|
| [10] |
[
|
| [11] |
[
|
| [12] |
[
|
| [13] |
[
|
| [14] |
[
|
| [15] |
[
|
| [16] |
[
|
| [17] |
|
| [18] |
[
|
| [19] |
[
|
| [20] |
[
|
| [21] |
[
|
| [22] |
[
|
| [23] |
|
| [24] |
|
/
| 〈 |
|
〉 |







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}