
Journal of Geo-information Science >
Extraction of Arctic Urban Land Use Information based on Multi-source Remote Sensing and Topograph
Received date: 2018-10-22
Request revised date: 2019-01-24
Online published: 2019-06-15
Supported by
National Key Research and Development Program of China, No.2016YFC1402701
National Natural Science Foundation of China, No.41801354
Copyright
As climate warms up and ice melts, the Arctic is drawing much more attention. It is undeniable that Arctic urban spatial information is critical for studying, understanding, and exploring the Arctic. Due to the special geographical situation, Arctic urban extraction has unique difficulties such as urban fragmentation and confusion with bare mountains. To overcome the problems of extracting Arctic urban, multi-source data including Landsat, DMSP/OLS, and ASTER-GDEM2 were used. Spectral features, texture features, nighttime light features, and topographic features were obtained after feature extraction. Apart from that, the AdaBoost algorithm was used to extract the urban areas at 1990, 2004 and 2016. To clearly and more completely understand the function of each feature, we divided features into four different groups, and compared their differences. The result shows that, adding terrain features or nighttime lighting features can improve the extraction accuracy, and that the combination of spectrum, texture, terrain, and nighttime lighting is the optimal combination of features. The overall accuracy (OA) and kappa values based on spectral and texture features are 86.20% and 0.68, respectively. After adding terrain feature, the accuracy increased by 2.7% (OA) and 6.21% (kappa) respectively. When only adding nighttime lighting feature, OA increased by 2.1% and kappa 0.50. The best result was reached when we added terrain feature and nighttime lighting simultaneously. In this case, the overall accuracy and kappa increased by 3.7% and 8.55%, respectively. So, it is the optimal combination of features. After identifying the optimal feature combination, the maximum likelihood method was used to extract urban areas to prove the effectiveness of the AdaBoost algorithm. Experiment results show that, with the optimal feature combination, extraction based on AdaBoost has its OA and kappa value 10% and 20% higher respectively than those by the maximum likelihood method. Finally, the urban expansion was analyzed. The intensity of the urban expansion in the study area is around 4.4×10-3 from 1990 to 2004 and this number is 4.5×10-3 from 2004 to 2016, which can be interpreted as slow expansion. The average level of expansion is 0.018, 1/2 of the global average. The urban expansion level between 1990 and 2004 is higher than that between 2004 and 2016. The difference in the dynamics during 1990-2004 and during 2004-2016 indicates that the study area is currently transitioning from a high-speed development period to a stable development period. Given the warming of the Arctic and the growing of population, Arctic urban is expected to continue expanding slowly.
Key words: AdaBoost algorithm; landsat; DMSP/OLS; DEM; urban extraction; Tromsø; Arctic town
LIANG Li , LI Xinyang , LIU Qingsheng , LIU Gaohuan , HUANG Chong , LI He . Extraction of Arctic Urban Land Use Information based on Multi-source Remote Sensing and Topograph[J]. Journal of Geo-information Science, 2019 , 21(6) : 969 -982 . DOI: 10.12082/dqxxkx.2019.180536
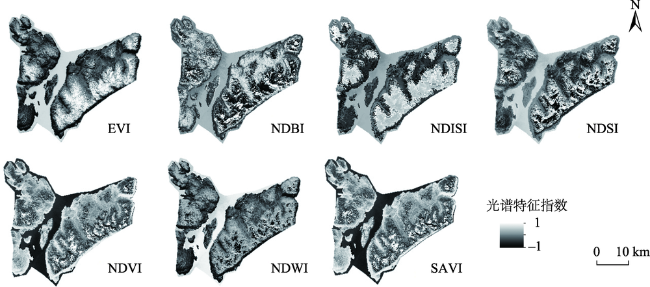
Fig. 1 Spectral indices (the case of 2016)图1 光谱特征指数(以2016年为例) |
Tab. 1 Ground truth samples for the 3 studied years (个)表1 3期数据采集样点数量 |
| 训练样本 | 测试样本 | ||||
|---|---|---|---|---|---|
| 年份 | 城镇 | 非城镇 | 城镇 | 非城镇 | |
| 1990 | 4458 | 21 914 | 265 | 735 | |
| 2004 | 4076 | 21 452 | 272 | 728 | |
| 2016 | 4225 | 20 855 | 327 | 673 | |
Tab. 2 Information of the spectral indices表2 光谱特征指数及计算方法 |
| 光谱特征 | 公式 | 编号 | 说明 |
|---|---|---|---|
| 归一化植被指数NDVI | (1) | 利用植被指数区分植被与城镇 | |
| 增强型植被指数EVI | (2) | 相较于NDVI,EVI对土壤背景变化敏感,能帮助区分稀疏植被与人造地表 | |
| 土壤调整植被指数SAVI | (3) | SAVI可以在研究区植被覆盖较低的地区降低土壤背景的影响,依旧作为NDVI指数对于区分植被与城镇的补充指标 | |
| 归一化水体指数NDWI | (4) | 用以区分水体与城镇 | |
| 归一化雪被指数NDSI | (5) | NDSI通过组合绿光波段及短波红外波段对图像的雪被信息进行增强 | |
| 归一化建筑指数NDBI | (6) | 最常用的城镇用地识别指标,城镇用地的与反射率值变高的同时其他地类反射率值变低,呈相反趋势,所以NDBI可有效识别城镇类别 | |
| 归一化差值不透水面指数NDISI | (7) | 代表可见光红、蓝、绿3个波段中的任何一个(本文选择了红光波段)。可将土壤与道路、建筑物等不透水面进行区分,可区分道路、建筑物等不透水面与水体 |
注:ρNIR表示近红外反射率;ρRED表示红光反射率;ρBLUE表示蓝光反射率;ρGREEN表示绿光反射率;ρSWIR1表示短波红外反射率;ρNIR、ρMIR、ρTIR分别表示近、中、热红外波段;ρVIS表示可见光红、蓝、绿3个波段中的任何一个(本文选择了红光波段)。 |
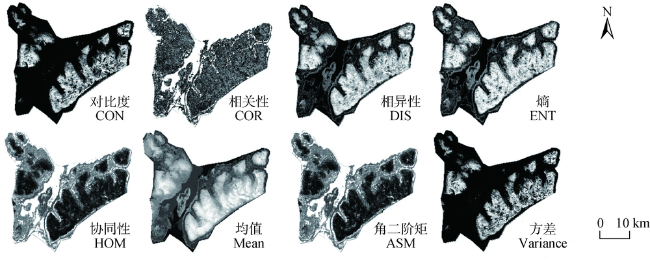
Fig. 2 Texture indices (the case of 2016)图2 2016年纹理特征指数 |
Tab. 3 Information of the texture indices表3 纹理特征指数及计算方法 |
| 纹理特征 | 公式 | 编号 | 说明 |
|---|---|---|---|
| 均值 Mean | (8) | 帮助寻找突变区域,有利于零星居民点的提取 | |
| 协方差Variance | (9) | 显示突变程度,辅助均值信息排除干扰像元 | |
| 协同性Homogeneity | (10) | 协同性其大小表征纹理信息的同质性,HOM值若大表示指定窗口的图像灰度矩阵总体变化小,灰度均匀 | |
| 对比度Contrast | (11) | 其大小表征了影像清晰程度和局部纹理深与浅,及图像灰度差。CON值高表示指定窗口的图像灰度矩阵纹理深则显示出来的图像辨识度高 | |
| 相异性Dissimilarity | (12) | 相异性与对比度比较相似,表征了灰度差绝对值的大小,呈现线性趋势。CON越高则DIS越高 | |
| 熵Entropy | (13) | 熵表征了图像灰度均匀性,换句话说就是纹理的丰富程度,若局部图像的所有像元的灰度值相等,则无纹理信息,ENT=0;若指定窗口的图像灰度矩阵灰度变化大,则纹理信息丰富、纹理信息复杂则ENT越大 | |
| 角二阶矩Angular Second Moment | (14) | 角二阶距又名能量,是指定窗口的图像灰度矩阵灰度值的平方和,其表征了图像中纹理特征的粗与细。当ASM大时,纹理特征粗大,ASM小时,纹理特征细小 | |
| 相关性Correlation | (15) | 相关性表征了指定窗口的图像灰度矩阵像元值的相似性度量。图像中存在纹理信息的位置对应的COR值大于不存在纹理信息位置的COR值 |
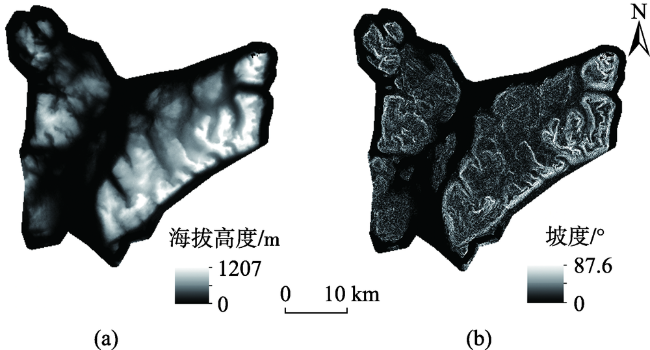
Fig. 3 Elevation and slope of the study area图3 研究区地形数据 |
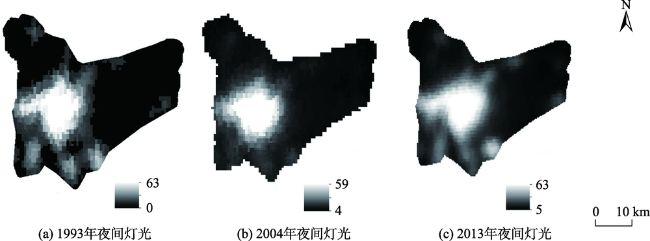
Fig. 4 DMSP night data of the study area in the 3 studied years图4 研究区3期DMSP夜间灯光数据 |
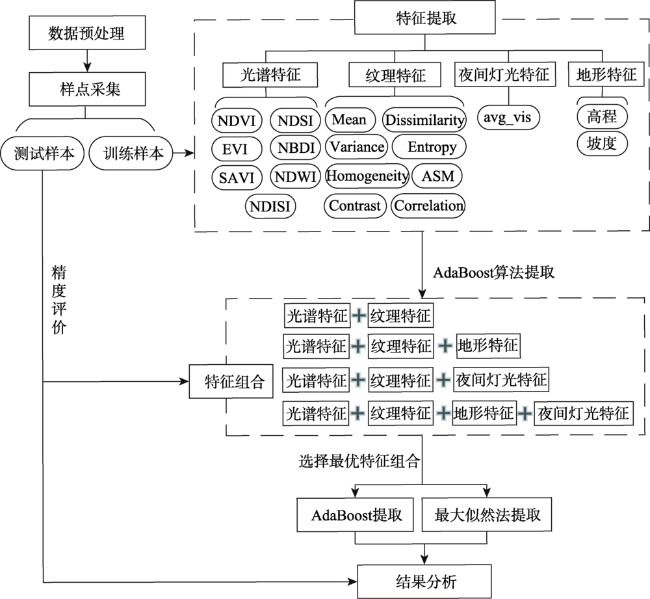
Fig. 5 Flow chart of urban extraction图5 城镇提取流程 |
Tab. 4 Extraction accuracy based on the spectral and texture features表4 基于光谱、纹理特征的提取精度 |
| 分类类别 | 真实类别 | |
|---|---|---|
| 城镇 | 非城镇 | |
| 城镇 | 249 | 78 |
| 非城镇 | 60 | 631 |
| 总体精度/% | 86.20 | |
| Kappa值 | 0.68 | |
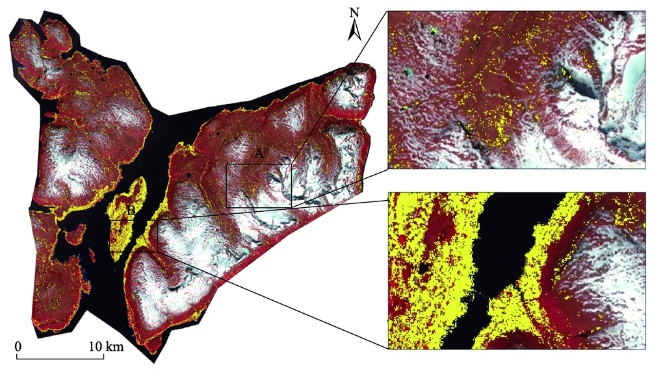
Fig. 6 Extraction result based on the spectral and texture features图6 基于光谱、纹理特征的提取结果 |
Tab. 5 Extraction Accuracy based on the spectral, texture, and terrain features表5 基于光谱、纹理、地形特征的提取精度 |
| 分类类别 | 真实类别 | |
|---|---|---|
| 城镇 | 非城镇 | |
| 城镇 | 262 | 65 |
| 非城镇 | 46 | 627 |
| 总体精度/% | 88.90 | |
| Kappa值 | 0.74 | |
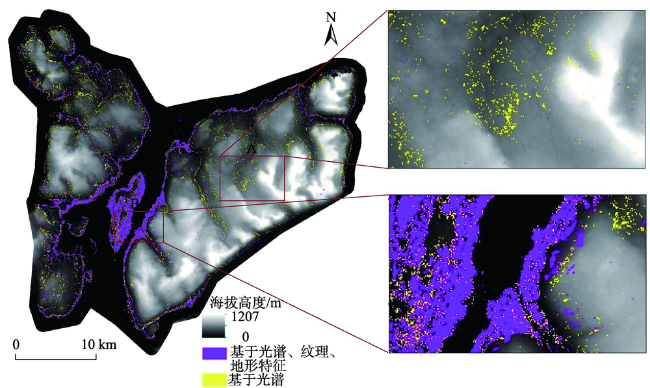
Fig. 7 Extraction result based on the spectral, texture, and terrain features (overlaying elevation data)图7 基于光谱、纹理、地形特征的提取结果(叠加高程数据) |
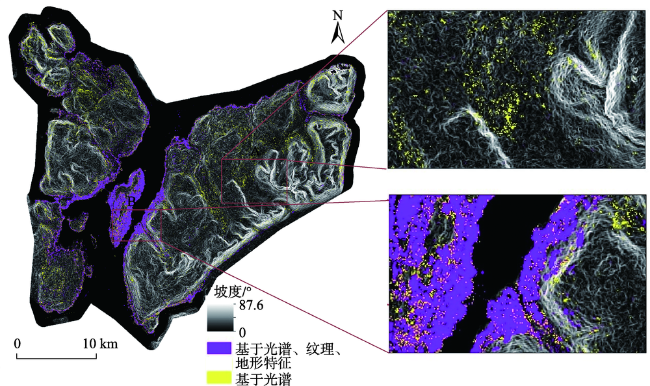
Fig. 8 Extraction results based on the spectral, texture, and terrain features (overlaying slope data)图8 基于光谱、纹理、地形特征的提取结果(叠加坡度数据) |
Tab. 6 Extraction accuracy based on the spectral, texture, and nightlight features表6 基于光谱、纹理、夜间灯光的提取精度 |
| 分类类别 | 真实类别 | |
|---|---|---|
| 城镇 | 非城镇 | |
| 城镇 | 262 | 65 |
| 非城镇 | 52 | 621 |
| 精度/% | 88.30 | |
| kappa值 | 0.73 | |
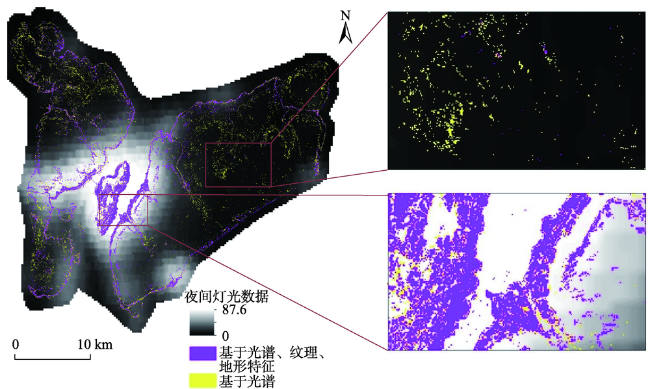
Fig. 9 Extraction result based on the spectral, texture, and nightlight features图9 基于光谱、纹理、夜间灯光特征的提取结果 |
Tab. 7 Extraction accuracy based on the spectral, texture, terrain, and nightlight features表7 基于光谱、纹理、地形、夜间灯光的提取精度 |
| 真实类别 | ||
|---|---|---|
| 分类类别 | 城镇 | 非城镇 |
| 城镇 | 268 | 59 |
| 非城镇 | 42 | 631 |
| 总体精度/% | 89.90 | |
| kappa值 | 0.77 | |
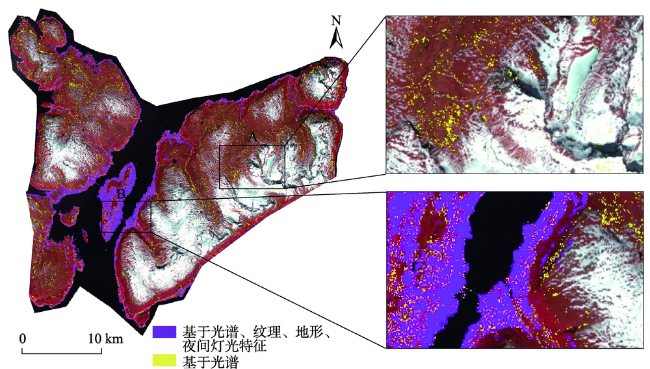
Fig. 10 Extraction result based on the spectral, texture, terrain, and nightlight features图10 基于光谱、纹理、地形、夜间灯光特征的提取结果 |
Tab. 8 Comparison of the extraction accuracy of the three studied years表8 3个年份提取结果精度比较 |
| 年份 | AdaBoost分类 | 最大似然法分类 | ||||
|---|---|---|---|---|---|---|
| 城镇 | 非城镇 | 城镇 | 非城镇 | |||
| 1990 | 城镇 | 238 | 27 | 258 | 7 | |
| 非城镇 | 16 | 719 | 139 | 596 | ||
| 总体精度/% | 95.70 | 85.40 | ||||
| Kappa值 | 0.88 | 0.67 | ||||
| 2004 | 城镇 | 232 | 40 | 262 | 10 | |
| 非城镇 | 31 | 697 | 161 | 567 | ||
| 总体精度/% | 92.90 | 82.90 | ||||
| Kappa值 | 0.82 | 0.63 | ||||
| 2016 | 城镇 | 268 | 59 | 162 | 149 | |
| 非城镇 | 42 | 631 | 38 | 651 | ||
| 总体精度/% | 89.90 | 81.30 | ||||
| Kappa值 | 0.77 | 0.52 | ||||
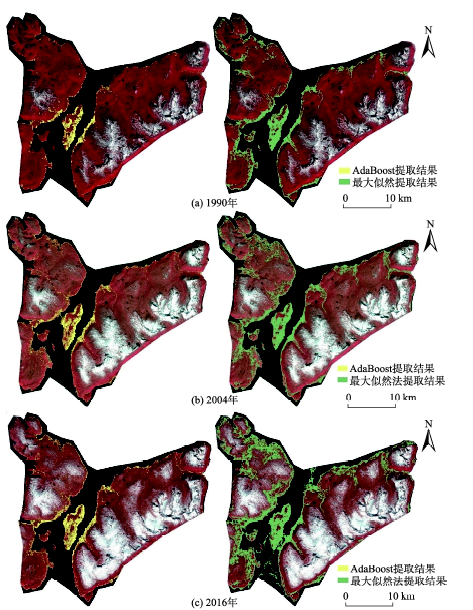
Fig. 11 Extraction results of 1990, 2004 and 2016图11 1990、2004 和2016 年提取结果 |
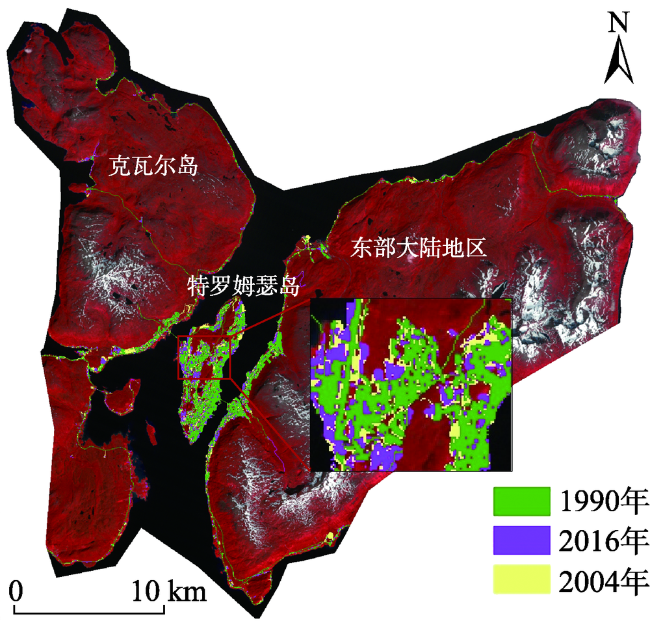
Fig. 12 Urban expansion of the study area图12 研究区城镇空间扩张 |
Tab. 9 Urban expand measurements表9 城镇扩张信息 |
| 年份 | 面积 /hm2 | 紧凑度 | 扩张速度/(hm2/y) | 扩张强度 | 动态度 |
|---|---|---|---|---|---|
| 1990 | 2174.7 | 0.01917 | - | - | - |
| 2004 | 2767.0 | 0.02091 | 42.31 | 0.044 | 0.01946 |
| 2016 | 3291.7 | 0.02411 | 43.72 | 0.045 | 0.01580 |
The authors have declared that no competing interests exist.
| [1] |
[
|
| [2] |
|
| [3] |
|
| [4] |
[
|
| [5] |
[
|
| [6] |
[
|
| [7] |
[
|
| [8] |
[
|
| [9] |
[
|
| [10] |
[
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
[
|
| [16] |
|
| [17] |
|
| [18] |
[
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
[
|
| [26] |
[
|
| [27] |
|
/
| 〈 |
|
〉 |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}